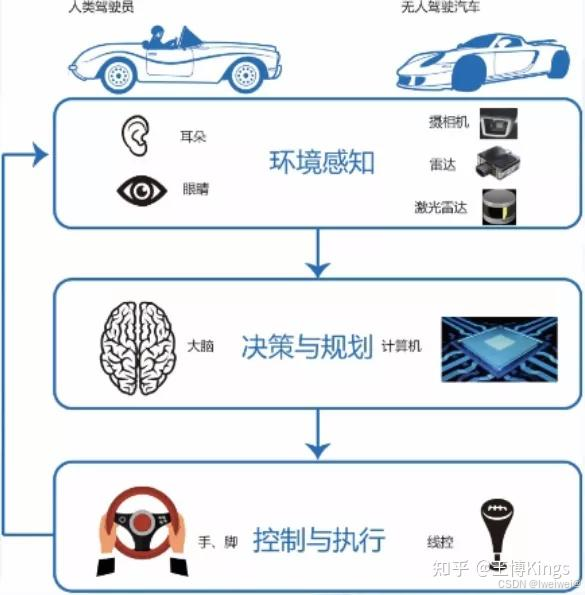
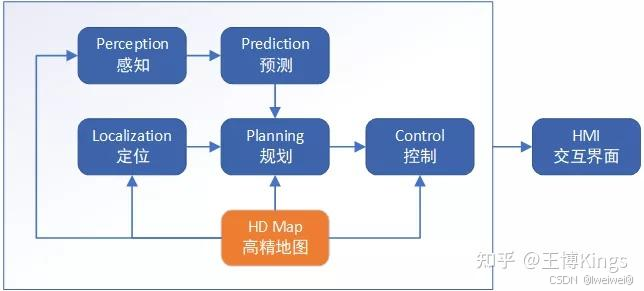
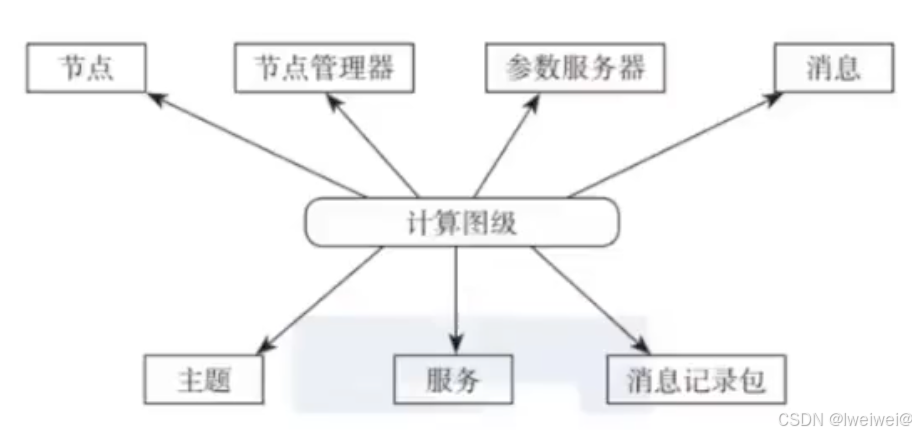
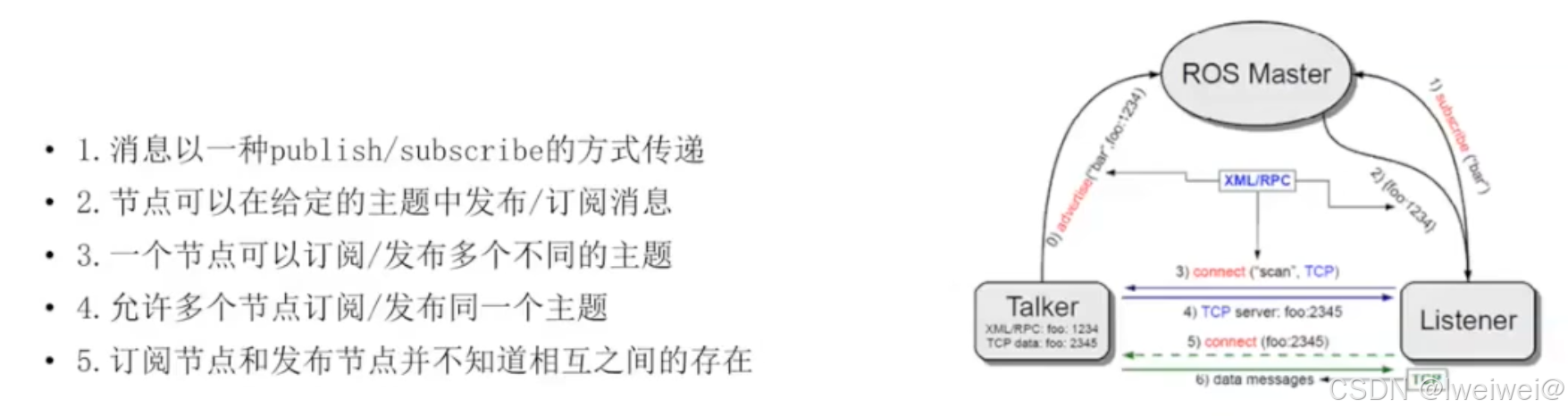
智能驾驶 1. 智能驾驶六大模块感知视觉定位预测系统路径规划控制学习强化学习 2. ROS2.1 结构 硬件组成 环境感知:摄像头、雷达、激光雷达决策与规划:计算机控制与执行:方向盘、刹车、油门 软件 1. 智能驾驶六大模块 感知 视觉定位 预测系统 路径规划 控制学习 强化学习 2. ROS 2.1 结构 总体结构 talker-listener 模型





 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言























 28
28







