









一、NXP官方开发板uboot编译测试
学习如何将 NXP 官方的 uboot 移植到正点原子的 I.MX6ULL 开发板上,
uboot 移植的一般流程:
①、在 uboot 中找到参考的开发平台,一般是原厂的开发板。
②、参考原厂开发板移植 uboot 到我们所使用的开发板上。
我们是将 NXP 官方的 uboot 移植到正点原子的 I.MX6ULL 开发板上,NXP 官方的uboot 放到了开发板光盘中,路径为 :1、例程源码->4、NXP 官方原版 Uboot 和 Linux->uboot-imx-rel_imx_4.1.15_2.1.0_ga.tar.bz2。将uboot-imx-rel_imx_4.1.15_2.1.0_ga.tar.bz2 发送到 Ubuntu中并解压,然后创建 VSCode 工程。

1.查找NXP官方的开发板默认配置文件
在移植之前,我们先编译一下 NXP 官方 I.MX6ULL EVK 开发板对应的 uboot,首先是配置uboot,configs 目录下有很多跟 I.MX6UL/6ULL 有关的配置如图所示,

我们最终只需要关注 mx6ull_14x14_evk_emmc_defconfig 这个配置文件就好了。
2.编译NXP官方开发板对应的uboot
执行命令
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- mx6ull_14x14_evk_emmc_defconfig
make V=1 ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- -j4

编译成功
为了方面,我们可以修改顶层Makefile

如果我们不想修改顶层Makefile
我们可以写一个shell脚本。
创建脚本
vim lat_mx6ull_uboot_emmc.sh

添加内容
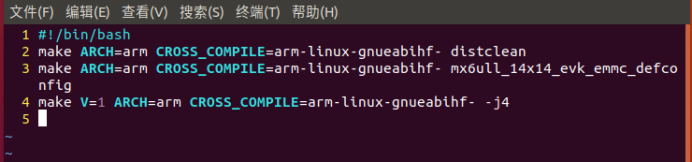
#!/bin/bash
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- distclean
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- mx6ull_14x14_evk_emmc_defco
nfig
make V=1 ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- -j4
修改权限

3.烧写验证与驱动测试
将 imxdownload 软件拷贝到 uboot 源码根目录下,

然后使用 imxdownload 软件将 u-boot.bin烧写到 SD 卡中,烧写命令如下:
./imxdownload u-boot.bin /dev/sdb //烧写到 SD 卡中,不能烧写到/dev/sda 或 sda1 里面

启动超级终端,上电测试

可以看出,uboot 启动正常,虽然我们用的是 NXP 官方 I.MX6ULL 开发板的uboot,但是在正点原子的 I.MX6ULL 开发板上是可以正常启动的。而且 DRAM 识别正确,为512MB
1.检查sd卡和emmc
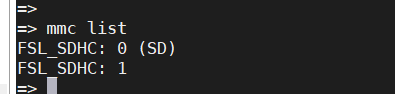
检查一下 SD 卡和 EMMC 驱动是否正常,使用命令 mmc list 列出当前的 MMC 设备
检查SD卡信息
mmc dev 0
mmc info

检查emmc信息
mmc dev 1
mmc info

SD 卡和 EMMC 的驱动都没问题
2.检查lcd
uboot 中的 LCD 驱动正确的话,启动 uboot 以后 LCD 上应该会显示出 NXP 的 logo

这里暂时是不成功的,需要修改
3.网络驱动
uboot 启动的时候提示“Board Net Initialization Failed”和“No ethernet found.”这两行,说明网络驱动也有问题,正常情况下应该是如图 所示:
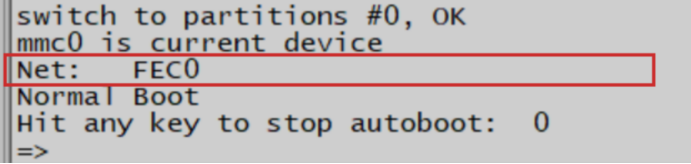
这里暂时也是不成功的,需要修改。
4.总结
总结一下 NXP 官方 I.MX6ULL EVK 开发板的 uboot 在正点原子 EMMC 版本 I.MX6ULL开发板上的运行情况:
①、uboot 启动正常,DRAM 识别正确,SD 卡和 EMMC 驱动正常。
②、uboot 里面的 LCD 驱动默认是给 4.3 寸 480x272 分辨率的,如果使用的其他分辨率的屏幕需要修改驱动。
③、网络不能工作,识别不出来网络信息,需要修改驱动。
接下来我们要做的工作如下:
①、前面我们一直使用着 NXP 官方开发板的 uboot 配置,接下来需要在 uboot 中添加我们自己的开发板,也就是正点原子的 I.MX6ULL 开发板。
②、解决 LCD 驱动和网络驱动的问题。
二、在U-Boot中添加自己的开发板
直接创建一个VScode工程
将之前创建的.vscode拷贝进去


1.添加开发板默认配置文件
先在 configs 目录下创建默认配置文件,
复制 mx6ull_14x14_evk_emmc_defconfig,然后重命名为 mx6ull_luatao_emmc_defconfig,

然后将mx6ull_luatao_emmc_defconfig的内容改成下面的。
CONFIG_SYS_EXTRA_OPTIONS="IMX_CONFIG=board/freescale/mx6ull_luatao_emmc/imximage.cfg,MX6ULL_EVK_EMMC_REWORK"
CONFIG_ARM=y
CONFIG_ARCH_MX6=y
CONFIG_TARGET_MX6ULL_LUATAO_EMMC=y
CONFIG_CMD_GPIO=y

2.添加开发板对应的头文件
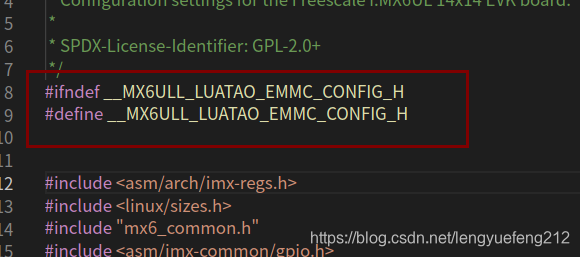
在 目 录 include/configs 下 添 加 I.MX6ULL-ALPHA 开 发 板 对 应 的 头 文 件 , 复 制include/configs/mx6ullevk.h,并重命名为 mx6ull_luatao_emmc.h

拷贝完成以后将:
#ifndef __MX6ULLEVK_CONFIG_H
#define __MX6ULLEVK_CONFIG_H
改为:
#ifndef __MX6ULL_LUATAO_EMMC_CONFIG_H
#define __MX6ULL_LUATAO_EMMC_CONFIG_H
```
mx6ull_luatao_emmc.h 里面有很多宏定义,这些宏定义基本用于配置 uboot,也有一些I.MX6ULL 的配置项目。如果我们自己要想使能或者禁止 uboot 的某些功能,那就在mx6ull_luatao_emmc.h 里面做修改即可。
## 3.添加开发板对应的板级文件夹
uboot 中每个板子都有一个对应的文件夹来存放板级文件,比如开发板上外设驱动文件等。NXP 的 I.MX 系列芯片的所有板级文件夹都存放在 board/freescale 目录下,在这个目录下有个名为 mx6ullevk 的文件夹,这个文件夹就是 NXP 官方 I.MX6ULL EVK 开发板的板级文件夹。复制 mx6ullevk,将其重命名为 mx6ull_luatao_emmc,命令如下:
```c
cp mx6ullevk/ mx6ull_luatao_emmc -r


进 入 mx6ull_luatao_emmc 目 录 中 , 将 其 中 的 mx6ullevk.c 文 件 重 命 名 为mx6ull_luatao_emmc.c,命令如下:

1 、修改 mx6ull_luatao_emmc 目录下的 Makefile 文件

2 、修改 mx6ull_luatao_emmc 目录下的 imximage.cfg 文件

3 、修改 mx6ull_luatao_emmc 目录下的 Kconfig 文件

**4 、修改 mx6ull_luatao_emmc 目录下的 MAINTAINERS **

4.修改UBoot图像界面配置文件
uboot 是支持图形界面配置,关于 uboot 的图形界面配置下一章会详细的讲解。修改文件arch/arm/cpu/armv7/mx6/Kconfig(如果用的 I.MX6UL 的话,应该修改 arch/arm/Kconfig 这个文件),在 207 行加入如下内容

在最后一行的 endif 的前一行添加如下内容

5.使用新添加的板子配置编译uboot
在 uboot 根目录下新建一个名为 mx6ull_luatao_emmc.sh 的 shell 脚本,在这个 shell 脚本里面输入如下内容:
#!/bin/bash
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- distclean
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- mx6ull_luatao_emmc_defconfig
make V=1 ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- -j4

修改权限运行脚本编译
chmod 777 mx6ull_luatao_emmc.sh //给予可执行权限,一次即可
./mx6ull_luatao_emmc.sh //运行脚本编译 uboot

等待编译完成,编译完成以后输入如下命令,查看一下添加的mx6ull_alientek_emmc.h 这个头文件有没有被引用。
grep -nR "mx6ull_luatao_emmc.h"
如果有很多文件都引用了mx6ull_alientek_emmc.h这个头文件,那就说明新板子添加成功,

编译完成以后就使用 imxdownload 将新编译出来的 u-boot.bin 烧写到 SD 卡中测试

6.LCD驱动修改
一般 uboot 中修改驱动基本都是在 xxx.h 和 xxx.c 这两个文件中进行的,xxx 为板子名称,比如 mx6ull_luatao_emmc.h 和 mx6ull_luatao_emmc.c 这两个文件
一般修改 LCD 驱动重点注意以下几点:
①、LCD 所使用的 GPIO,查看 uboot 中 LCD 的 IO 配置是否正确。
②、LCD 背光引脚 GPIO 的配置。
③、LCD 配置参数是否正确。
正点原子的 I.MX6U-ALPHA 开发板 LCD 原理图和 NXP 官方 I.MX6ULL 开发板一致,也就是 LCD 的 IO 和背光 IO 都一样的,所以 IO 部分就不用修改了。需要修改的之后 LCD 参数,打开文件mx6ull_luatao_emmc.c,找到如下所示内容:

其中定义了一个变量 displays,类型为 display_info_t,这个结构体是 LCD信息结构体,其中包括了 LCD 的分辨率,像素格式,LCD 的各个参数等。
display_info_t 定义在文件 arch/arm/include/asm/imx-common/video.h 中,定义如下:

pixfmt 是像素格式,也就是一个像素点是多少位,如果是 RGB565 的话就是 16 位,如果是 888 的话就是 24 位,一般使用 RGB888。结构体 display_info_t 还有个 mode 成员变量,此成员变量也是个结构体,为 fb_videomode,定义在文件 include/linux/fb.h 中,定义如下:

结构体 fb_videomode 里面的成员变量为 LCD 的参数,这些成员变量函数如下:
name :LCD 名字,要和环境变量中的 panel 相等。
xres 、yres :LCD X 轴和 Y 轴像素数量。
pixclock:像素时钟,每个像素时钟周期的长度,单位为皮秒。
left_margin :HBP,水平同步后肩。
right_margin :HFP,水平同步前肩。
upper_margin:VBP,垂直同步后肩。
lower_margin:VFP,垂直同步前肩。
hsync_len :HSPW,行同步脉宽。
vsync_len:VSPW,垂直同步脉宽。
vmode :大多数使用 FB_VMODE_NONINTERLACED,也就是不使用隔行扫描。
我使用的屏幕是7寸的800*480分辨率的屏幕,屏幕的参数为

7084 的像素时钟是33.3MHZ
因此 pixclock = (1/33300000)*10^12 = 30030
配置如下
struct display_info_t const displays[] = {{
.bus = MX6UL_LCDIF1_BASE_ADDR,
.addr = 0,
.pixfmt = 24,
.detect = NULL,
.enable = do_enable_parallel_lcd,
.mode = {
.name = "luatao7084",
.xres = 800,
.yres = 480,
.pixclock = 30030,
.left_margin = 46, //HBPD
.right_margin = 210, // HFPD
.upper_margin = 23, // VBPD
.lower_margin = 22, // VFBD
.hsync_len = 1, // HSPW
.vsync_len = 1, // VSPW
.sync = 0,
.vmode = FB_VMODE_NONINTERLACED
} } };
因为LCD没有复位引脚,所以注释掉

打开 mx6ull_luatao_emmc.h,找到所有如下语句:
panel=TFT43AB
将其改为:
panel=luatao7084

一共有两处。
修改板子的名称
board_name=EVK


修改完成以后重新编译一遍 uboot 并烧写到 SD 中启动。

屏幕也会显示出NXP的logo
屏幕驱动成功。
7.网络驱动修改
1.I.MX6U-ALPHA 开发板网络简介
I.MX6UL/ULL 内部有个以太网 MAC 外设,也就是 ENET,需要外接一个 PHY 芯片来实现网络通信功能,也就是内部 MAC+外部 PHY 芯片的方案。
2.网络接口
I.MX6UL/ULL 有两个网络接口 ENET1 和 ENET2,正点原子的 I.MX6U-ALPHA 开发板提供了这两个网络接口,其中 ENET1 和 ENET2 都使用 LAN8720A 作为 PHY 芯片。
3.芯片选型
NXP 官方的I.MX6ULL EVK 开发板使用 KSZ8081 这颗 PHY 芯片,LAN8720A 相比 KSZ8081 具有体积小、外围器件少、价格便宜等优点。
4.原理图

ENET1 的网络 PHY 芯片为 LAN8720A,通过 RMII 接口与 I.MX6ULL 相连,正点原子I.MX6U-ALPHA 开发板的 ENET1 引脚与 NXP 官方的 I.MX6ULL EVK 开发板基本一样,唯独复位引脚不同。
5.移植步骤
LAN8720A 内部是有寄存器的,I.MX6ULL 会读取 LAN8720 内部寄存器来判断当前的物理链接状态、连接速度(10M 还是 100M)和双工状态(半双工还是全双工)。I.MX6ULL 通过 MDIO接口来读取 PHY 芯片的内部寄存器,MDIO 接口有两个引脚,ENET_MDC 和 ENET_MDIO,ENET_MDC 提供时钟,ENET_MDIO 进行数据传输。一个 MDIO 接口可以管理 32 个 PHY 芯片,同一个 MDIO 接口下的这些 PHY 使用不同的器件地址来做区分,MIDO 接口通过不同的器件地址即可访问到相应的 PHY 芯片。
I.MX6U-ALPHA 开发板 ENET1 上连接的 LAN8720A器件地址为 0X0,所示我们要修改 ENET1 网络驱动的话重点就三点:
①、ENET1 复位引脚初始化。
②、LAN8720A 的器件 ID。
③、LAN8720 驱动
6.网络 PHY 地址修改
首先修改 uboot 中的 ENET1 和 ENET2 的 PHY 地址和驱动,打开 mx6ull_luatao_emmc.h这个文件,找到如下代码:

第 332 行的宏 CONFIG_FEC_ENET_DEV 用于选择使用哪个网口,默认为 1,也就是选择ENET2。
第 336 行为 ENET1 的 PHY 地址,默认是 0X2,
第 340 行为 ENET2 的 PHY 地址,默认为 0x1。
根据前面的分析可知,正点原子的 I.MX6U-ALPHA 开发板 ENET1 的 PHY 地址为0X0,ENET2 的 PHY 地址为 0X1,
所以需要将第 336 行的宏 CONFIG_FEC_MXC_PHYADDR改为 0x0。
第 340 行宏 CONFIG_FEC_MXC_PHYADDR改为0x1。
第 346 行定了一个宏 CONFIG_PHY_MICREL,此宏用于使能 uboot 中 Micrel 公司的 PHY驱动,KSZ8081 这颗 PHY 芯片就是 Micrel 公司生产的,不过 Micrel 已经被 Microchip 收购了。
如果要使用 LAN8720A,那么就得将 CONFIG_PHY_MICREL 改为 CONFIG_PHY_SMSC,也就是使能 uboot 中的 SMSC 公司中的 PHY 驱动,因为 LAN8720A 就是 SMSC 公司生产的。
所以示例代码 有三处要修改:
①、修改 ENET1 网络 PHY 的地址。
②、修改 ENET2 网络 PHY 的地址。
③、使能 SMSC 公司的 PHY 驱动。

uboot 中网络 PHY 芯片地址修改完成以后就是网络复位引脚的驱动修改了,打开mx6ull_luatao_emmc.c,找到如下代码:

7.删除74LV595
以 IOX 开头的宏定义是 74LV595 的相关 GPIO,因为 NXP 官方I.MX6ULL EVK 开发板使用 74LV595 来扩展 IO,两个网络的复位引脚就是由 74LV595 来控制的。正点原子的 I.MX6U-ALPHA 开发板并没有使用 74LV595,因此我们将示例代码中的代码删除掉,替换为如下所示代码:

ENET1 的复位引脚连接到 SNVS_TAMPER7 上,对应 GPIO5_IO07,ENET2 的复位引脚连接到 SNVS_TAMPER8 上,对应 GPIO5_IO08。
继续在 mx6ull_luatao_emmc.c 中找到如下代码:同理,示例代码 是 74LV595 的 IO 配置参数结构体,将其删除掉。


继续在mx6ull_luatao_emmc.c 中找到函数 iox74lv_init,如下所示:


iox74lv_init 函数是 74LV595 的初始化函数,iox74lv_set 函数用于控制 74LV595 的 IO 输出电平,将这两个函数全部删除掉!
在 mx6ull_luatao_emmc.c 中找到 board_init 函数,此函数是板子初始化函数,会被board_init_r 调用,board_init 会调用 imx_iomux_v3_setup_multiple_pads 和 iox74lv_init 这两个函数来初始化
74lv595 的 GPIO,将这两行删除掉。

至此,mx6ull_luatao_emmc.c 中关于 74LV595 芯片的驱动代码都删除掉了,接下来就是添加 I.MX6U-ALPHA 开发板两个网络复位引脚了。
8.添加网络复位引脚驱动
在 mx6ull_luatao_emmc.c 中找到如下所示代码:

结构体数组 fec1_pads 和 fec2_pads 是 ENET1 和 ENET2 这两个网口的 IO 配置参数,
在这两个数组中添加两个网口的复位 IO 配置参数,完成以后如下所示:



继续在文件 mx6ull_luatao_emmc.c 中找到函数 setup_iomux_fec,此函数默认代码如下:

函数 setup_iomux_fec 就是根据 fec1_pads 和 fec2_pads 这两个网络 IO 配置数组来初始化I.MX6ULL 的网络 IO。我们需要在其中添加网络复位 IO 的初始化代码,并且复位一下 PHY 芯片,修改后的 setup_iomux_fec 函数如下:

这里少加了大括号,一定要注意加上,不然后面编译会报错。
9.修改 drivers/net/phy/phy.c 文件中的函数 genphy_update_link
大功基本上告成,还差最后一步,uboot 中的 LAN8720A 驱动有点问题,打开文件drivers/net/phy/phy.c,找到函数 genphy_update_link,这是个通用 PHY 驱动函数,此函数用于更新 PHY 的连接状态和速度。使用 LAN8720A 的时候需要在此函数中添加一些代码,修改后的函数 genphy_update_link 如下所示:

225 行~237 行就是新添加的代码,为条件编译代码段,只有使用 SMSC 公司的 PHY 这段代码才会执行(目前只测试了 LAN8720A,SMSC 公司其他的芯片还未测试)。
至此网络的复位引脚驱动修改完成,重新编译 uboot,然后将 u-boot.bin 烧写到 SD 卡中并启动,uboot 启动信息如图所示:

可以看到网络配置成功,但是地址没有设置,我们需要设置一下。
10.设置网络环境变量
在 uboot 中使用网络之前要先设置几个环境变量,命令如下
setenv ipaddr 192.168.1.55 //开发板 IP 地址
setenv ethaddr b8:ae:1d:01:00:00 //开发板网卡 MAC 地址
setenv gatewayip 192.168.1.1 //开发板默认网关
setenv netmask 255.255.255.0 //开发板子网掩码
setenv serverip 192.168.1.7 //服务器地址,也就是 Ubuntu 地址
saveenv //保存环境变量

然后reset重启uboot

可以看到没有报错信息了。
可以ping一下ubuntu的IP地址

有“host 192.168.1.7 is alive”这句,说明 ping 主机成功,说明ENET2网络工作正常。
此 uboot 的驱动部分就修改完成了,uboot 移植也完成了,uboot 的最终目的就是启动 Linux 内核,所以需要通过启动 Linux 内核来判断 uboot 移植是否成功。在启动 Linux 内核之前我们先来学习两个重要的环境变量 bootcmd 和 bootargs。
三、bootcmd和bootargs环境变量
uboot 中有两个非常重要的环境变量 bootcmd 和 bootargs,接下来看一下这两个环境变量。
bootcmd 和 bootagrs 是采用类似 shell 脚本语言编写的,里面有很多的变量引用,这些变量其实都 是 环 境 变 量 , 有 很 多 是 NXP 自 己 定 义 的 。 文 件 mx6ull_luatao_emmc.h 中 的 宏CONFIG_EXTRA_ENV_SETTINGS 保存着这些环境变量的默认值,内容如下:


宏 CONFIG_EXTRA_ENV_SETTINGS 是个条件编译语句,使用 NAND 和 EMMC 的时候宏 CONFIG_EXTRA_ENV_SETTINGS 的值是不同的。
1.环境变量bootcmd
bootcmd 在前面已经说了很多次了,bootcmd 保存着 uboot 默认命令,uboot 倒计时结束以后就会执行 bootcmd 中的命令。
这些命令一般都是用来启动 Linux 内核的,比如读取 EMMC 或者 NAND Flash 中的 Linux 内核镜像文件和设备树文件到 DRAM 中,然后启动 Linux 内核。可以在 uboot 启动以后进入命令行设置 bootcmd 环境变量的值。如果 EMMC 或者 NAND 中没有保存 bootcmd 的值,那么 uboot 就会使用默认的值,板子第一次运行 uboot 的时候都会使用默认值来设置 bootcmd 环境变量。
可以查看bootcmd 的变量
打开文件 include/env_default.h,在此文件中有如下所示内容

第 13~23 行 , 这 段 代 码 是 个 条 件 编 译 , 由 于 没 有 定 义
DEFAULT_ENV_INSTANCE_EMBEDDED 和 CONFIG_SYS_REDUNDAND_ENVIRONMENT,
因此 uchar default_environment[]数组保存环境变量。
上图中指定了很多环境变量的默认值,
比如 bootcmd 的默认值就是CONFIG_BOOTCOMMAND,
bootargs 的默认值就是 CONFIG_BOOTARGS
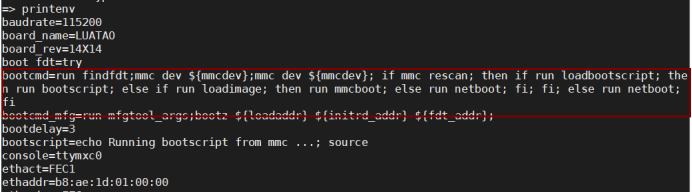
我们可以在mx6ull_luatao_emmc.h 文件中通过设置宏 CONFIG_BOOTCOMMAND 来设置 bootcmd 的默认值,NXP 官方设置的 CONFIG_BOOTCOMMAND 值如下:

看起来很复杂的样子!因为 uboot 使用了类似 shell 脚本语言的方式来编写的,我们一行一行来分析。
第 206 行,run findfdt;使用的是 uboot 的 run 命令来运行 findfdt,
findfdt 是 NXP 自行添加的环境变量。
findfdt 是用来查找开发板对应的设备树文件(.dtb)。
IMX6ULL EVK 的设备树文件为 imx6ull-14x14-evk.dtb,findfdt 内容如下:

findfdt 里面用到的变量有 fdt_file,board_name,board_rev,这三个变量内容如下:
fdt_file=undefined,board_name=EVK,board_rev=14X14
findfdt 做的事情就是判断,fdt_file 是否为 undefined,如果 fdt_file 为 undefined 的话那就要根据板子信息得出所需的.dtb 文件名。此时 fdt_file 为 undefined,所以根据 board_name 和board_rev 来判断实际所需的.dtb 文件,如果 board_name 为 EVK 并且 board_rev=9x9 的话 fdt_file就为 imx6ull-9x9-evk.dtb。如果 board_name 为 EVK 并且 board_rev=14x14 的话 fdt_file 就设置为 imx6ull-14x14-evk.dtb。因此 IMX6ULL EVK 板子的设备树文件就是 imx6ull-14x14-evk.dtb,
因此 run findfdt 的结果就是设置 fdt_file 为 imx6ull-14x14-evk.dtb。
第 206 行,mmc dev ${mmcdev}用于切换 mmc 设备,mmcdev 为 1,因此这行代码就是:mmc dev mmcdev 1,也就是切换到 EMMC 上。
第 207 行,先执行 mmc dev ${mmcdev}切换到 EMMC 上,然后使用命令 mmc rescan 扫描看有没有 SD 卡或者 EMMC 存在,如果没有的话就直接跳到 216 行,执行 run netboot,netboot也是一个自定义的环境变量,这个变量是从网络启动 Linux 的。如果 mmc 设备存在的话就从mmc 设备启动。
第 209 行,运行 loadbootscript 环境变量,此环境变量内容如下:
loadbootscript=fatload mmc ${mmcdev}:${mmcpart} ${loadaddr} ${script};
其中 mmcdev=1,mmcpart=1,loadaddr=0x80800000,script= boot.scr,因此展开以后就是loadbootscript=fatload mmc 1:1 0x80800000 boot.scr;
loadbootscript 就是从 mmc1 的分区 1 中读取文件 boot.src 到 DRAM 的 0X80800000 处。但是 mmc1 的分区 1 中没有 boot.src 这个文件,可以使用命令“ls mmc 1:1”查看一下 mmc1 分区1 中的所有文件,看看有没有 boot.src 这个文件。
第 210 行,如果加载 boot.src 文件成功的话就运行 bootscript 环境变量,bootscript 的内容如下:
bootscript=echo Running bootscript from mmc ...;
Source
上面那个是打印输出信息
因为 boot.src 文件不存在,所以 bootscript 也就不会运行
第 212 行,如果 loadbootscript 没有找到 boot.src 的话就运行环境变量 loadimage,环境变量loadimage 内容如下:
loadimage=fatload mmc ${mmcdev}:${mmcpart} ${loadaddr} ${image}
其中 mmcdev=1,mmcpart=1,loadaddr=0x80800000,image = zImage,展开以后就是:
loadimage=fatload mmc 1:1 0x80800000 zImage
可以看出 loadimage 就是从 mmc1 的分区中读取 zImage 到内存的 0X80800000 处,而 mmc1的分区 1 中存在 zImage。
第 213 行,加载 linux 镜像文件 zImage 成功以后就运行环境变量 mmcboot,否则的话运行netboot 环境变量。mmcboot 环境变量如下:

第 155 行,输出信息“Booting from mmc …”。
第 156 行,运行环境变量 mmcargs,mmcargs 用来设置 bootargs,后面分析 bootargs 的时候在学习。
第157行,判断boot_fdt是否为yes或者try,根据uboot输出的环境变量信息可知boot_fdt=try。因此会执行 158行的语句。
第 158 行,运行环境变量 loadfdt,环境变量 loadfdt 定义如下:
loadfdt=fatload mmc ${mmcdev}:${mmcpart} ${fdt_addr} ${fdt_file}
展开以后就是:
loadfdt=fatload mmc 1:1 0x83000000 imx6ull-14x14-evk.dtb
因此 loadfdt的作用就是从 mmc1 的分区 1 中读取 imx6ull-14x14-evk.dtb 文件并放到 0x83000000处。
第 159 行,如果读取.dtb 文件成功的话那就调用命令 bootz 启动 linux,调用方法如下:
bootz ${loadaddr} - ${fdt_addr};
展开就是:
bootz 0x80800000 - 0x83000000 (注意‘-’前后要有空格)
至此 Linux 内核启动,如此复杂的设置就是为了从 EMMC 中读取 zImage 镜像文件和设备树文件。
经过分析,浓缩出来的仅仅是 4 行精华:
mmc dev 1 //切换到 EMMC
fatload mmc 1:1 0x80800000 zImage //读取 zImage 到 0x80800000 处
fatload mmc 1:1 0x83000000 imx6ull-14x14-evk.dtb //读取设备树到 0x83000000 处
bootz 0x80800000 - 0x83000000 //启动 Linux
NXP 官方将 CONFIG_BOOTCOMMAND 写的这么复杂只有一个目的:为了兼容多个板子,所以写了个很复杂的脚本。当我们明确知道我们所使用的板子的时候就可以大幅简化宏CONFIG_BOOTCOMMAND 的 设 置 , 比 如 我 们 要 从 EMMC 启 动 , 那 么 宏CONFIG_BOOTCOMMAND 就可简化为:
#define CONFIG_BOOTCOMMAND \
"mmc dev 1;" \
"fatload mmc 1:1 0x80800000 zImage;" \
"fatload mmc 1:1 0x83000000 imx6ull-alientek-emmc.dtb;" \
"bootz 0x80800000 - 0x83000000;"
或者可以直接在 uboot 中设置 bootcmd 的值,这个值就是保存到 EMMC 中的,命令如下:
setenv bootcmd 'mmc dev 1; fatload mmc 1:1 80800000 zImage; fatload mmc 1:1 83000000 imx6ull-alientek-emmc.dtb; bootz 80800000 - 83000000;'
2.环境变量bootargs
bootargs 保存着 uboot 传递给 Linux 内核的参数,在上一小节讲解 bootcmd 的时候说过,bootargs 环境变量是由 mmcargs 设置的,mmcargs 环境变量如下:
mmcargs=setenv bootargs console=${console},${baudrate} root=${mmcroot}
其中 console=ttymxc0,baudrate=115200,mmcroot=/dev/mmcblk1p2 rootwait rw,因此将mmcargs 展开以后就是:
mmcargs=setenv bootargs console= ttymxc0, 115200 root= /dev/mmcblk1p2 rootwait rw
可以看出环境变量 mmcargs 就是设置 bootargs 的值为“console= ttymxc0, 115200 root=/dev/mmcblk1p2 rootwait rw”,bootargs 就是设置了很多的参数的值,这些参数 Linux 内核会使用到,
常用的参数有:
1. console
console 用来设置 linux 终端(或者叫控制台),也就是通过什么设备来和 Linux 进行交互,是串口还是 LCD 屏幕?如果是串口的话应该是串口几等等。一般设置串口作为 Linux 终端,这样我们就可以在电脑上通过 MobaXterm来和 linux 交互了。这里设置 console 为 ttymxc0,因为 linux启动以后 I.MX6ULL 的串口 1 在 linux 下的设备文件就是/dev/ttymxc0,在 Linux 下,一切皆文件。
ttymxc0 后面有个“,115200”,这是设置串口的波特率,console=ttymxc0,115200 综合起来就是设置 ttymxc0(也就是串口 1)作为 Linux 的终端,并且串口波特率设置为 115200。
2.root
root 用来设置根文件系统的位置,root=/dev/mmcblk1p2 用于指明根文件系统存放在mmcblk1 设备的分区 2 中。EMMC 版本的核心板启动 linux 以后会存在/dev/mmcblk0、
/dev/mmcblk1、/dev/mmcblk0p1、/dev/mmcblk0p2、/dev/mmcblk1p1 和/dev/mmcblk1p2 这样的文件,其中/dev/mmcblkx(x=0~n)表示 mmc 设备,而/dev/mmcblkxpy(x=0n,y=1n)表示 mmc 设备x 的分区 y。在 I.MX6U-ALPHA 开发板中/dev/mmcblk1 表示 EMMC,而/dev/mmcblk1p2 表示EMMC 的分区 2。
root 后面有“rootwait rw”,rootwait 表示等待 mmc 设备初始化完成以后再挂载,否则的话mmc 设备还没初始化完成就挂载根文件系统会出错的。rw 表示根文件系统是可以读写的,不加rw 的话可能无法在根文件系统中进行写操作,只能进行读操作。
3.rootfstype
此选项一般配置 root 一起使用,rootfstype 用于指定根文件系统类型,如果根文件系统为ext 格式的话此选项无所谓。如果根文件系统是 yaffs、jffs 或 ubifs 的话就需要设置此选项,指定根文件系统的类型。
bootargs 常设置的选项就这三个,后面遇到其他选项的话再讲解。
四、uboot启动linux测试
uboot 已经移植好了,bootcmd 和 bootargs 这两个重要的环境变量也讲解了,接下来就要测试一下 uboot 能不能完成它的工作:启动 Linux 内核。我们测试两种启动 Linux 内核的方法,一种是直接从 EMMC 启动,一种是从网络启动。
1.从emmc启动linux系统
从 EMMC 启动也就是将编译出来的 Linux 镜像文件 zImage 和设备树文件保存在 EMMC中,uboot 从 EMMC 中读取这两个文件并启动,这个是我们产品最终的启动方式。
I.MX6U-ALPHA 开发板(EMMC 版本)已经将 zImage 文件和设备树文件烧写到了 EMMC 中,所以我们可以直接读取来测试。
先检查一下 EMMC 的分区 1 中有没有zImage 文件和设备树文件,输入命令“ls mmc 1:1”,结果如图所示:

此时 EMMC 分区 1 中存在 zimage 和 不同屏幕的设备树文件 设备树文件我们使用7寸屏幕的-800x480(也就是imx6ull-14x14-emmc-7-800x480-c.dtb)这两个文件,所以我们可以测试新移植的 uboot 能不能启动 linux 内核。
设置 bootargs 和 bootcmd这两个环境变量,设置如下:
setenv bootargs 'console=ttymxc0,115200 root=/dev/mmcblk1p2 rootwait rw'
setenv bootcmd 'mmc dev 1; fatload mmc 1:1 80800000 zImage; fatload mmc 1:1 83000000 imx6ull-14x14-emmc-7-800x480-c.dtb; bootz 80800000 - 83000000;'
saveenv

设置好以后直接输入 boot,或者 run bootcmd 即可启动 Linux 内核,如果 Linux 内核启动成功的话就会输出如图所示的启动信息:

2.从网络启动linux系统
从网络启动 linux 系统的唯一目的就是为了调试!不管是为了调试 linux 系统还是 linux 下的驱动。每次修改 linux 系统文件或者 linux 下的某个驱动以后都要将其烧写到 EMMC 中去测试,这样太麻烦了。
我们可以设置 linux 从网络启动,也就是将 linux 镜像文件和根文件系统都放到 Ubuntu 下某个指定的文件夹中,这样每次重新编译 linux 内核或者某个 linux 驱动以后只需要使用 cp 命令将其拷贝到这个指定的文件夹中即可,这样就不用需要频繁的烧写 EMMC,这样就加快了开发速度。
这里我们使用 tftp 从 Ubuntu 中下载 zImage 和设备树文件,前提是要将 zImage 和设备树文件放到 Ubuntu 下的 tftp 目录中

设置 bootargs 和 bootcmd 这两个环境变量,设置如下:
setenv bootargs 'console=ttymxc0,115200 root=/dev/mmcblk1p2 rootwait rw'
setenv bootcmd 'tftp 80800000 zImage; tftp 83000000 imx6ull-14x14-emmc-7-800x480-c.dtb; bootz 80800000 - 83000000'
saveenv
这里需要注意一下看看ubuntu的ip地址是否有变化,我的变成了192.168.1.5,所以我这里修改一下。
执行run bootcmd
一开始是下载ubuntu的两个文件

下载完成后就是启动linux内核

3.移植过程
uboot 移植到此结束,
简单总结一下 uboot 移植的过程:
①、不管是购买的开发板还是自己做的开发板,基本都是参考半导体厂商的 dmeo 板,而半导体厂商会在他们自己的开发板上移植好 uboot、linux kernel 和 rootfs 等,最终制作好 BSP包提供给用户。我们可以在官方提供的 BSP 包的基础上添加我们的板子,也就是俗称的移植。
②、我们购买的开发板或者自己做的板子一般都不会原封不动的照抄半导体厂商的 demo
板,都会根据实际的情况来做修改,既然有修改就必然涉及到 uboot 下驱动的移植。
③、一般 uboot 中需要解决串口、NAND、EMMC 或 SD 卡、网络和 LCD 驱动,因为 uboot
的主要目的就是启动 Linux 内核,所以不需要考虑太多的外设驱动。
④、在 uboot 中添加自己的板子信息,根据自己板子的实际情况来修改 uboot 中的驱动。















 2993
2993











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









