







最近在进行行人检测的工作,opencv已集成Navneet Dalal 和Bill Triggs于2005年CVPR提出的利用Hog进行特征提取,利用线性SVM作为分类器,从而实现行人检测的方法。依赖于Ubuntu 14.04+OpenCV 2.4.10,训练自己的SVM行人分类器。
HOG基础
进入HOGDescriptor所在的头文件,其构造函数
CV_WRAP HOGDescriptor() : winSize(64,128), blockSize(16,16), blockStride(8,8),
cellSize(8,8), nbins(9), derivAperture(1), winSigma(-1),
histogramNormType(HOGDescriptor::L2Hys), L2HysThreshold(0.2), gammaCorrection(true),
nlevels(HOGDescriptor::DEFAULT_NLEVELS)
{}
CV_WRAP HOGDescriptor(Size _winSize, Size _blockSize, Size _blockStride,
Size _cellSize, int _nbins, int _derivAperture=1, double _winSigma=-1,
int _histogramNormType=HOGDescriptor::L2Hys,
double _L2HysThreshold=0.2, bool _gammaCorrection=false,
int _nlevels=HOGDescriptor::DEFAULT_NLEVELS)
: winSize(_winSize), blockSize(_blockSize), blockStride(_blockStride), cellSize(_cellSize),
nbins(_nbins), derivAperture(_derivAperture), winSigma(_winSigma),
histogramNormType(_histogramNormType), L2HysThreshold(_L2HysThreshold),
gammaCorrection(_gammaCorrection), nlevels(_nlevels)
{}
CV_WRAP HOGDescriptor(const String& filename)
{
load(filename);
}
HOGDescriptor(const HOGDescriptor& d)
{
d.copyTo(*this);
}
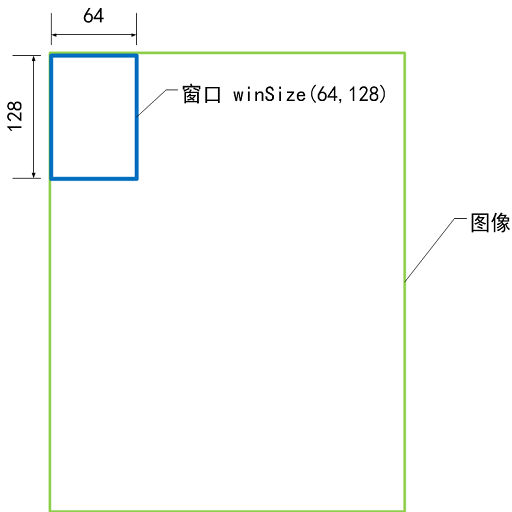
主要参数是winSize(64,128),blockSize(16,16), blockStride(8,8),cellSize(8,8),nbins(9)等。其各自的含义可解释如下:
检测窗口的大小:winSize
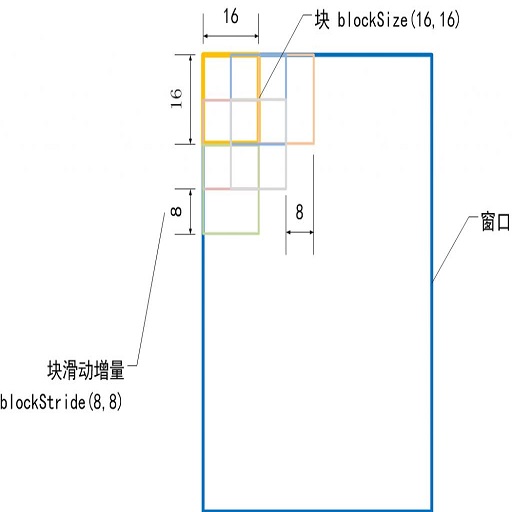
块的大小:blockSize
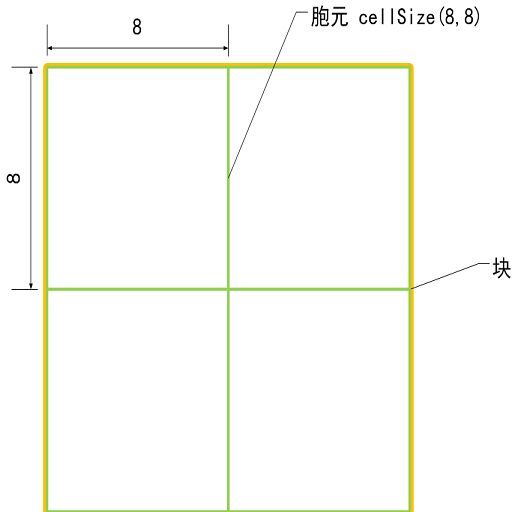
cell的大小:cellSize
梯度方向数:nbins
nBins表示在一个胞元(cell)中统计梯度的方向数目,例如nBins=9时,在一个胞元内统计9个方向的梯度直方图,每个方向为180/9=20度。
HOG描述子维度
OpenCV中是利用如下方式计算hog描述子的长度的,其源码为:
size_t HOGDescriptor::getDescriptorSize() const
{
CV_Assert(blockSize.width % cellSize.width == 0 &&
blockSize.height % cellSize.height == 0);
CV_Assert((winSize.width - blockSize.width) % blockStride.width == 0 &&
(winSize.height - blockSize.height) % blockStride.height == 0 );
return (size_t)nbins*
(blockSize.width/cellSize.width)*
(blockSize.height/cellSize.height)*
((winSize.width - blockSize.width)/blockStride.width + 1)*
((winSize.height - blockSize.height)/blockStride.height + 1);
}
OpenCV中一个Hog描述子是针对一个检测窗口而言的,一个检测窗口有((128-16)/8+1)*((64-16)/8+1)=105个Block,一个Block有4个Cell,一个Cell的Hog描述子向量的长度是9,所以一个检测窗口的Hog描述子的向量长度是105*4*9=3780维。
训练自己的SVM分类器
选择INRIAPerson/train_64x128_H96/中的正负样本,利用
$ ls pos/ > pos.lst
$ ls neg/ > neg.lst分别将pos和neg目录下所用图像目录存入pos.lst和neg.list中。
利用如何程序进行训练得到自己的分类器并保存在hogSVMdetector.txt中。
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/objdetect/objdetect.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/ml/ml.hpp"
#include <iostream>
#include <fstream>
#include <cstring>
using namespace cv;
using namespace std;
class MySVM : public CvSVM
{
public:
double * get_alpha_vector()
{
return this->decision_func->alpha;
}
float get_rho()
{
return this->decision_func->rho;
}
};
int main(int argc, char** argv)
{
Mat img;
if( argc < 5 ) {
cout << "USAGE: " << argv[0] << " <pos_img_path> | <pos_img_list>.txt | <neg_img_path> | <neg_img_list>.txt" << endl;
exit(1);
}
string posimgPath_fname(argv[1]);
ifstream imgPosList_file(argv[2], ios::in);
if (!imgPosList_file.good()) {
cout << "Cannot open image list file!" << endl;
}
string negimgPath_fname(argv[3]);
ifstream imgNegList_file(argv[4], ios::in);
if (!imgNegList_file.good()) {
cout << "Cannot open image list file!" << endl;
}
HOGDescriptor hog(Size(64,128), Size(16,16), Size(8,8), Size(8,8), 9, 1, -1, HOGDescriptor::L2Hys, 0.2, false, HOGDescriptor::DEFAULT_NLEVELS);
size_t hogLength = hog.getDescriptorSize();
vector < string > img_path;
vector < int > img_catg;
string buf;
while ( imgPosList_file ) {
if ( getline( imgPosList_file, buf ) ) {
string imgpath = posimgPath_fname + buf;
img_path.push_back(imgpath);
img_catg.push_back(1);
}
}
imgPosList_file.close();
while ( imgNegList_file ) {
if ( getline( imgNegList_file, buf ) ) {
string imgpath = negimgPath_fname + buf;
img_path.push_back(imgpath);
img_catg.push_back(-1);
}
}
imgNegList_file.close();
Mat sampleFeatureMat(img_path.size(), hogLength, CV_32FC1);
Mat sampleLabelMat(img_path.size(), 1, CV_32FC1);
cout << "*****************************************" << endl;
cout << "Start to load pos and neg image, Compute its feature..." << endl;
double t = (double)getTickCount();
Mat src;
for (int i = 0; i < img_path.size(); i++) {
src = imread(img_path[i]);
if(!src.data) {
cout << "Can not load the image: " << img_path[i] << endl;
continue;
}
resize(src, src, Size(64, 128));
vector < float > descriptors;
hog.compute(src, descriptors, Size(8,8));
for ( int j = 0; j < descriptors.size(); j++) {
sampleFeatureMat.at<float>(i,j) = descriptors[j];
sampleLabelMat.at<float>(i,0) = img_catg[i];
}
}
cout << "end of loading and computing !" << endl;
cout << "*****************************************" << endl;
cout << "Start to train for SVM classifier..." << endl;
CvSVMParams params;
params.svm_type = CvSVM::C_SVC;
params.kernel_type = CvSVM::LINEAR;
params.term_crit = cvTermCriteria(CV_TERMCRIT_ITER, 100, 1e-6);
// Train the SVM
MySVM svm;
svm.train(sampleFeatureMat, sampleLabelMat, Mat(), Mat(), params);
svm.save("SVM_HOG.xml");
cout << "end of training for SVM !!!" << endl;
cout << "*****************************************" << endl;
t = (double)getTickCount() - t;
cout << "Training time = " << t*1000./cv::getTickFrequency() << "ms" << endl;
int DescriptorDim = svm.get_var_count();
int supportVectorNum = svm.get_support_vector_count();
Mat alphaMat = Mat::zeros(1, supportVectorNum, CV_32FC1);
Mat supportVectorMat = Mat::zeros(supportVectorNum, DescriptorDim, CV_32FC1);
Mat resultMat = Mat::zeros(1, DescriptorDim, CV_32FC1);
for(int i=0; i<supportVectorNum; i++) {
const float * pSVData = svm.get_support_vector(i);
for(int j=0; j<DescriptorDim; j++) {
supportVectorMat.at<float>(i,j) = pSVData[j];
}
}
double * pAlphaData = svm.get_alpha_vector();
for(int i=0; i<supportVectorNum; i++) {
alphaMat.at<float>(0,i) = pAlphaData[i];
}
resultMat = -1 * alphaMat * supportVectorMat;
vector<float> myDetector;
for(int i=0; i<DescriptorDim; i++) {
myDetector.push_back(resultMat.at<float>(0,i));
}
myDetector.push_back(svm.get_rho());
ofstream out("hogSVMDetector.txt", ios::out);
for (int i = 0; i < myDetector.size() - 1; i++) {
out << myDetector[i] << '\n';
}
out << myDetector[myDetector.size() - 1];
out.close();
return 0;
}
利用训练得到的分类器进行行人检测
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/objdetect/objdetect.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/ml/ml.hpp"
#include <iostream>
#include <fstream>
#include <cstring>
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
Mat img;
if( argc < 4 ) {
cout << "USAGE: " << argv[0] << " <hog_svm_detector>.txt | <image_path> | <image_list>.txt" << endl;
exit(1);
}
ifstream filein(argv[1], ios::in);
string imgPath_fname(argv[2]);
ifstream imgList_file(argv[3], ios::in);
if (!imgList_file.good()) {
cout << "Cannot open image list file!" << endl;
}
vector< float > detector;
float val = 0.0f;
while( !filein.eof() ) {
filein >> val;
detector.push_back(val);
}
filein.close();
cout << "detector: " << detector.size() << endl;
HOGDescriptor hog;
hog.setSVMDetector(detector);
namedWindow("people detector", 1);
string buf;
string imgpath;
while(imgList_file) {
if(getline(imgList_file, buf)) {
imgpath = imgPath_fname + buf;
}
img = imread(imgpath);
cout << imgpath << " : ";
if(!img.data)
continue;
fflush(stdout);
vector<Rect> found, found_filtered;
double t = (double)getTickCount();
hog.detectMultiScale(img, found, 0, Size(8,8), Size(32,32), 1.05, 2);
t = (double)getTickCount() - t;
cout << "detection time = " << t*1000./cv::getTickFrequency() << "ms" << endl;
size_t i, j;
for( i = 0; i < found.size(); i++ ) {
Rect r = found[i];
for( j = 0; j < found.size(); j++ )
if( j != i && (r & found[j]) == r)
break;
if( j == found.size() )
found_filtered.push_back(r);
}
for( i = 0; i < found_filtered.size(); i++ ) {
Rect r = found_filtered[i];
// the HOG detector returns slightly larger rectangles than the real objects.
// so we slightly shrink the rectangles to get a nicer output.
r.x += cvRound(r.width*0.1);
r.width = cvRound(r.width*0.8);
r.y += cvRound(r.height*0.07);
r.height = cvRound(r.height*0.8);
rectangle(img, r.tl(), r.br(), cv::Scalar(0,255,0), 3);
}
imshow("people detector", img);
waitKey(100) ;
}
cout << "Done!" << endl;
return 0;
}














 4088
4088











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









