









 本文深入探讨了光流法的原理,特别是Lucas-Kanade(LK)算法。LK算法通过比较连续帧的差异来估计物体运动,利用泰勒公式建立模型,并通过窗口最小化误差来求解光流。文章指出,由于孔径问题,选取目标的角点可以更准确地估计光流。最后,介绍了如何将问题转化为最小二乘法优化问题来求解光流速度。
本文深入探讨了光流法的原理,特别是Lucas-Kanade(LK)算法。LK算法通过比较连续帧的差异来估计物体运动,利用泰勒公式建立模型,并通过窗口最小化误差来求解光流。文章指出,由于孔径问题,选取目标的角点可以更准确地估计光流。最后,介绍了如何将问题转化为最小二乘法优化问题来求解光流速度。
前言
光流法是计算机视觉领域非常常用的算法,深度学习时代的CV工程师可能会用到光流法,但鲜有对其实现原理做深度地探索的。今天正好趁着复现一个项目把LK光流法的算法进行一个探索和整理。
先看一个LK光流法实现的效果:代码可戳《python光流实验》

1. 问题建模
光流法是通过比较连续两帧的差异来估计运动物体移动的。
咱们先选定一个点
p
p
p,在理论上,时间
t
0
t_0
t0时刻,经历过
Δ
t
\Delta t
Δt后,点
p
p
p会移动到另一个位置
p
′
p'
p′,并且
p
′
p'
p′本身和周围都有着与
p
p
p相似的亮度值。朴素的LK光流法是直接用灰度值代替RGB作为亮度。
根据上面的描述,对于点
p
p
p而言,假设
p
p
p的坐标值是
(
x
,
y
)
(x,y)
(x,y),有
I
(
x
,
y
,
t
)
=
I
(
x
+
Δ
x
,
y
+
Δ
y
,
t
+
Δ
t
)
I(x, y, t) = I(x+\Delta x,y+\Delta y, t+\Delta t)
I(x,y,t)=I(x+Δx,y+Δy,t+Δt)
(
公
式
1
)
(公式1)
(公式1)
其中,
I
(
x
,
y
,
t
)
I(x,y,t)
I(x,y,t)代表点
p
p
p在时间
t
t
t时刻的亮度值(灰度值)。经过了时间
Δ
t
\Delta t
Δt以后,点
p
p
p分别向两个轴移动了
Δ
x
\Delta x
Δx、
Δ
y
\Delta y
Δy的距离。
根据泰勒公式:(咱们在这里把
x
x
x、
y
y
y看做是
t
t
t的函数,把公式(1)看做单变量
t
t
t的等式,只需对t进行展开)
I
(
x
,
y
,
t
)
=
I
(
x
,
y
,
t
)
+
∂
I
∂
x
∂
x
∂
t
+
∂
I
∂
y
∂
y
∂
t
+
∂
I
∂
t
+
o
(
Δ
t
)
I(x,y,t) = I(x, y,t) + {\partial{I}\over \partial x}{{\partial{x}\over \partial t}} + {\partial{I}\over \partial y}{\partial{y}\over \partial t} + {\partial{I}\over \partial t} + o(\Delta{t})
I(x,y,t)=I(x,y,t)+∂x∂I∂t∂x+∂y∂I∂t∂y+∂t∂I+o(Δt)
(
公
式
2
)
(公式2)
(公式2)
最后那一项是佩亚诺余项,更高阶,咱们可以假定为0。所以,根据公式2,我们可以得到:
∂
I
∂
x
∂
x
∂
t
+
∂
I
∂
y
∂
y
∂
t
+
∂
I
∂
t
=
0
{\partial{I}\over \partial x}{{\partial{x}\over \partial t}} + {\partial{I}\over \partial y}{\partial{y}\over \partial t} + {\partial{I}\over \partial t}=0
∂x∂I∂t∂x+∂y∂I∂t∂y+∂t∂I=0
(
公
式
3
)
(公式3)
(公式3)
设
∂
x
∂
t
=
u
,
∂
y
∂
t
=
v
{{\partial{x}\over \partial t}}=u, {{\partial{y}\over \partial t}}=v
∂t∂x=u,∂t∂y=v
∂
I
∂
x
=
I
x
,
∂
I
∂
y
=
I
y
,
∂
I
∂
t
=
I
t
{{\partial{I}\over \partial x}}=I_x,{{\partial{I}\over \partial y}}=I_y,{{\partial{I}\over \partial t}}=I_t
∂x∂I=Ix,∂y∂I=Iy,∂t∂I=It
则公式(3)可以简写成:
I
x
u
+
I
y
v
+
I
t
=
0
I_x u + I_y v + I_t = 0
Ixu+Iyv+It=0
(
公
式
4
)
(公式4)
(公式4)
公式4,便是咱们的核心公式了。其中
u
u
u、
v
v
v代表两个方向(x方向和y方向)的移动速度,
I
x
I_x
Ix、
I
y
I_y
Iy、
I
t
I_t
It代表了亮度在三个轴上的偏导(也就是梯度)。把
u
u
u、
v
v
v计算出来,咱们的光流也就算出来了。
拿到当前帧,假设我们要计算点
p
p
p的光流。其中
I
x
I_x
Ix、
I
y
I_y
Iy都可以通过当前帧计算出来,而
I
t
I_t
It可以通过两帧的差分计算出来。所以,对于公式(4)而言,未知数只有
u
u
u和
v
v
v。
2.Lucas-Kanade
LK算法就是用来求解公式(4)的。LK有一个window的概念,即我先划定一块区域比如(5x5)的像素区域,我们可以认为这块区域每个点的移动速度
u
u
u、
v
v
v是一致的。
首先,
I
x
I_x
Ix、
I
y
I_y
Iy是怎么得到的呢?对于光流法,咱们有个理想的假定就是:运动物体只会做平移。所以,亮度梯度咱们只需考虑当前帧的梯度即可。对于
I
t
I_t
It我们在两帧做一个差分就可以得到。
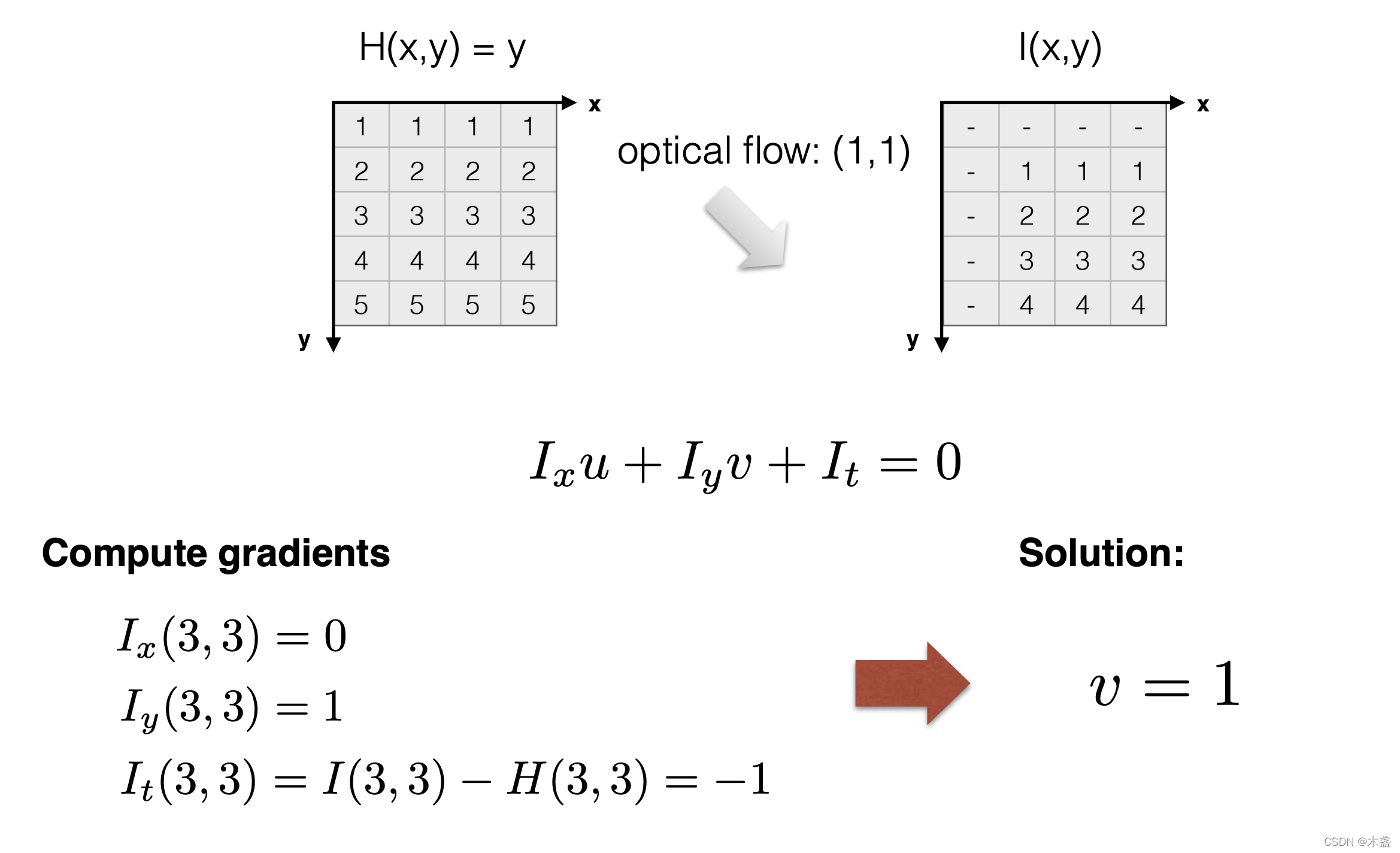
咱们看当前帧,也就是右边那个。
I
x
(
3
,
3
)
=
0
I_x(3,3) = 0
Ix(3,3)=0是因为在
x
x
x轴的数值左右都是3,没有梯度变化。
I
y
(
3
,
3
)
=
1
I_y(3,3)=1
Iy(3,3)=1是因为在
y
y
y轴数值变化幅度为1。上图显示的情况,咱们只能算出y轴速度
v
v
v,没有办法算出水平(x轴)速度
u
u
u。这是因为该移动目标本身在x轴方向上就没有亮度变化。这也是一种典型的问题,叫孔径问题(Aperture Problem)。
孔径问题是讲,如果我们通过一个小孔来看全局,很多情况下的移动信息我们是看不出来的,这个用一张图就可以很好理解:
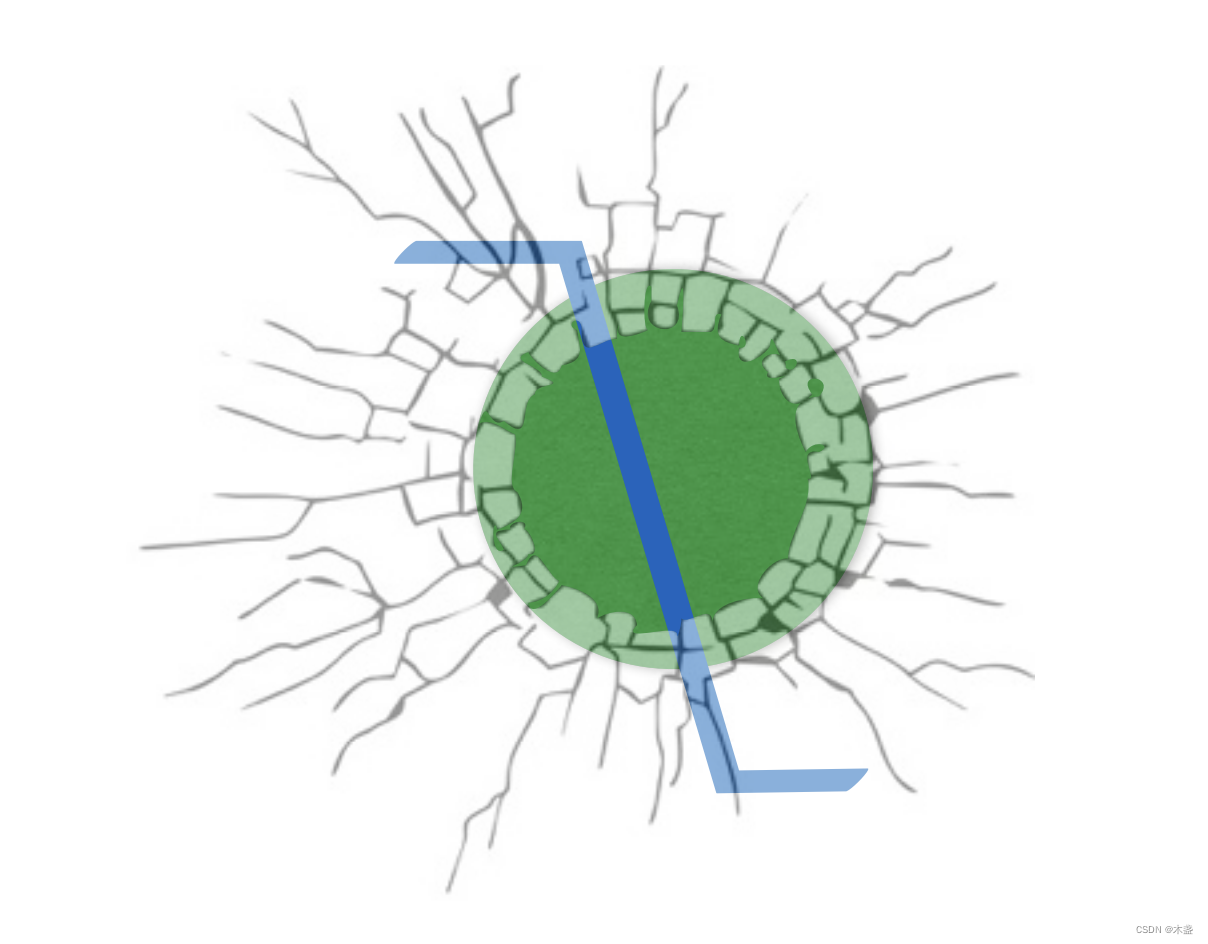
假设墙上破了一个洞,咱们通过这个洞来看一个图形的移动情况。假设,我们看到的是上图这种情况,绿色部分就是我们的视野,我们无法判断这个图形是否是沿着切线方向移动或者是静止。听懂掌声。
那么基于小区域的LK光流法也可能遇到Aperture Problem,所以我们在追光流的时候,选点通常会选目标的角点(corner)。角点的情况如下图:
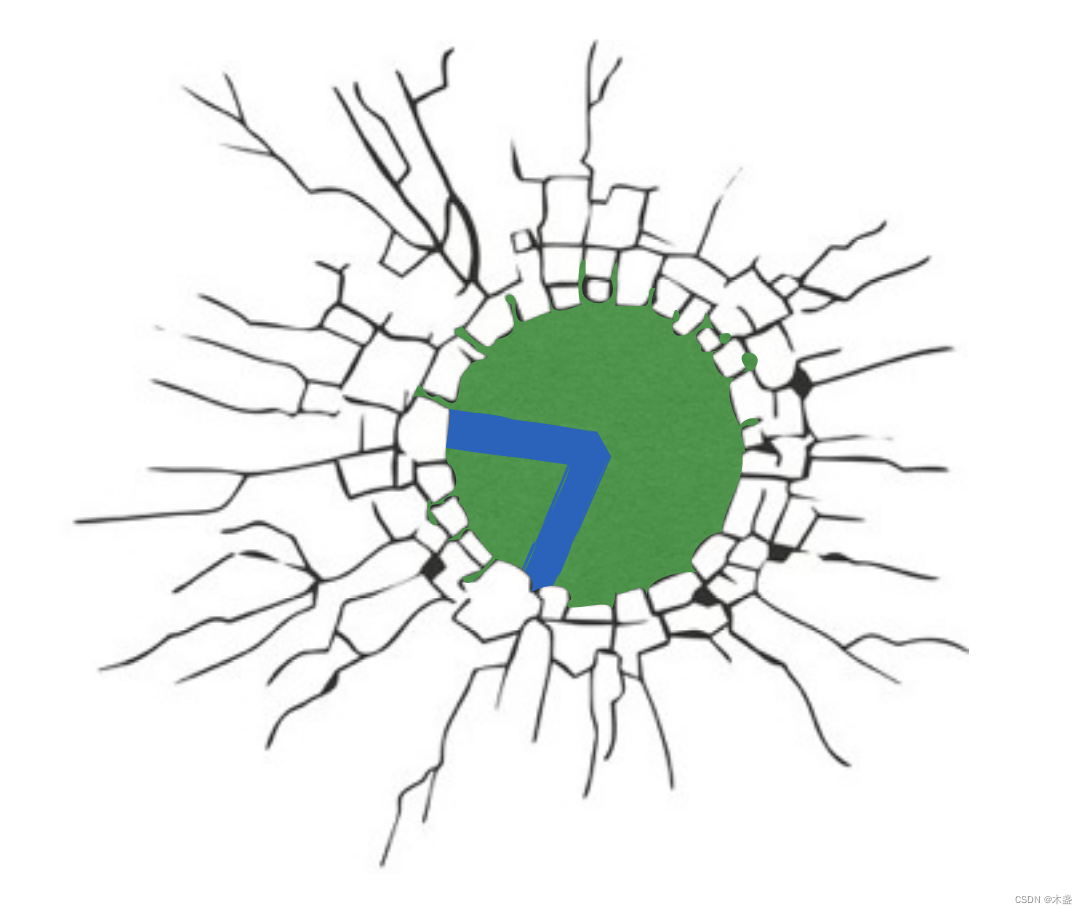
如果角点在视野内的话,咱们就可以判断这个图形的运动方向。听懂继续掌声。
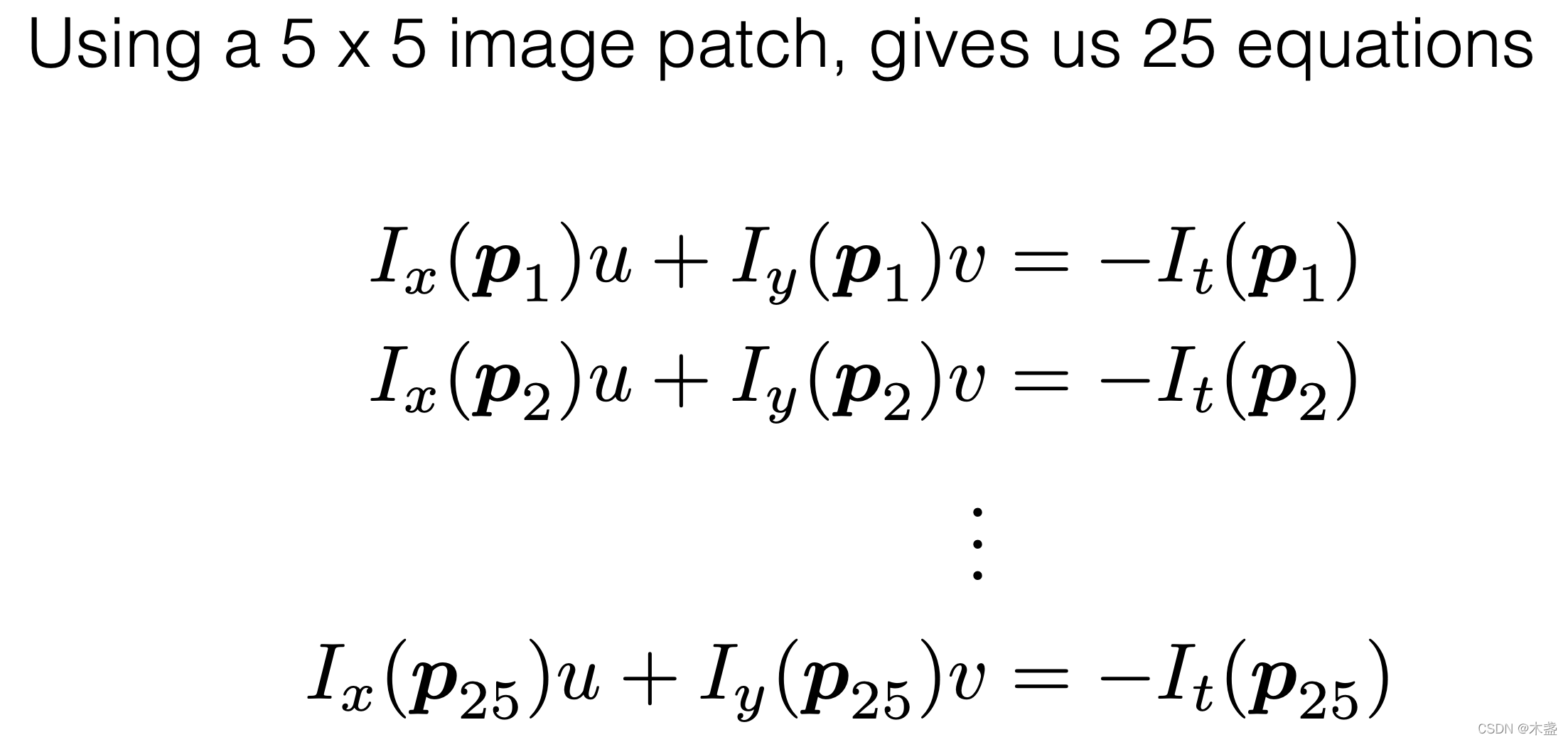
接着公式(4),咱们如果通过window方式求解
u
u
u、
v
v
v,那还是很好办的。假设咱们取的是5x5的window,那么window内的每个点,我们都认为有一样的移动方向,咱们可以构建出25个等式。求解二元一次方程,通常两个等式就可以求解。但那是理想情况,实际情况是没有一组
(
u
,
v
)
(u,v)
(u,v)能同时满足这25个等式,咱们要做的是最小化这个差异。
写成矩阵形式:

只需找到一组
(
u
,
v
)
(u,v)
(u,v),即上图中的
x
x
x,满足
x
^
=
a
r
g
m
i
n
x
∣
∣
A
x
−
b
∣
∣
2
\hat{x} = \underset x {argmin} {||\bold{A}x-b||^2}
x^=xargmin∣∣Ax−b∣∣2
公
式
(
5
)
公式(5)
公式(5)
这里就可以用最小二乘法来进行优化了,分别求偏导得出导数为0的点的值就是最优值。可推导出,
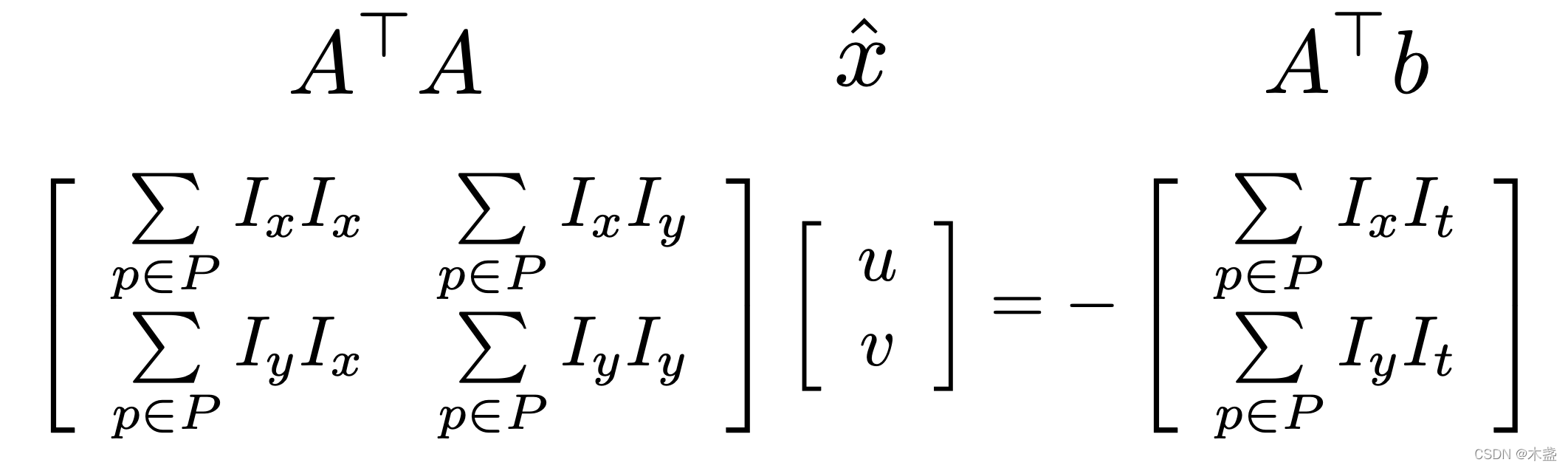
这便是Lucas-Kanade光流算法的公式了。
参考:http://www.cs.cmu.edu/~16385/s15/lectures/Lecture21.pdf


















 1642
1642

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











