







状态空间表达:
下面用一个例子来说明状态空间表达
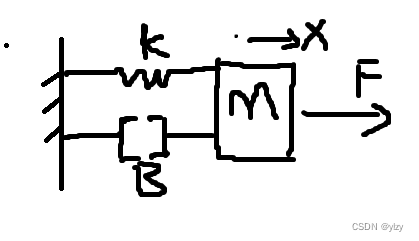
上图为一个弹簧震动阻尼系统,该系统的动态方程表达式:
其中
:弹簧的胡克系数;
:该系统阻尼系数;
:物体质量;
:施加的外力;
:物体位移;
:
关于t时刻的导数,即t时刻的速度;
:
关于t时刻的二阶导数,即t时刻的加速度。
下面设,
,
作为这个系统的输入,即
,则有
(
求导即
求导) (1)
(2)
上述方程(1)和(2)为该系统的状态变化方程,体现了该系统物体的速度和加速度随时间的变化量。
设,
分别为测量到的物体的位置和速度,则有
(3)
(4)
将方程(1)和(2),(3)和(4)使用矩阵形式表达:
即:,
可以看出是
对时间的导数,反应出在连续时间上的变化,即系统状态变化。
即:,
是在连续时间上对
的观测值,即测量值。
,
在离散采样时间上进行表达,则有:
(5)
(6)
在之前的 卡尔曼学习(1) http://t.csdnimg.cn/0lXcb中提到过,系统的估计和测量都不可避免的存在误差,在方程(5)和(6)中分别引入过程噪音和测量噪音
,即:
(7)
(8)
:系统状态值,预测值
:测量值
现在整个系统的的预测值和测量值都引入了噪音,导致两个结果均不准确,那么如何从这两个不准确的值中得到最优解呢?这就是卡尔曼滤波要解决的问题。
根据和
去得到最优解,就和之前 卡尔曼学习(2) http://t.csdnimg.cn/LXzek中根据两个有误差结果去估计一个相对准确的最优解很相似,不过是换做了一个预测值和一个测量值去进行数据融合。
学习笔记,参考资料【【卡尔曼滤波器】1_递归算法_Recursive Processing】 https://www.bilibili.com/video/BV1ez4y1X7eR/?share_source=copy_web&vd_source=c29456ffa88bc7559f8ffbe6f8e8f7a5















 1005
1005











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









