









/*以下皆为个人在学习过程中的一些见解,写在这里一方面是为了复习每周所学的一些知识,另一方面是留作笔记用;我所用的环境配置为Ubuntu16.04+Kinetic版本的ROS+catkin管理工具+C++IDE之ClionC+PythonIDE之pycharm*/
TF坐标系转换:http://wiki.ros.org/tf/Tutorials
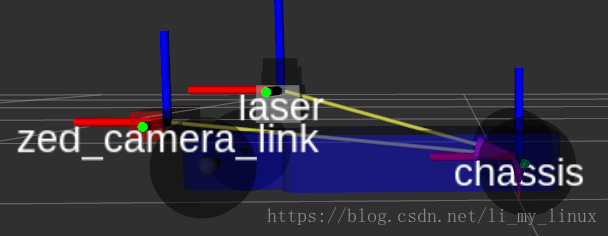
如下图所示,一个机器人系统包含多个坐标系统,比如,世界坐标、激光雷达坐标,双目摄像头坐标等等,在运行过程中我们经常要用到各种坐标系之间的相互转换。
需要一个发布广播和一个接收
broadcaster:
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "world", turtle_name));
listener:
listener.lookupTransform("/turtle2", "/turtle1",ros::Time(0), transform);
tf话题发布的相关信息:
transforms:
-
header:
seq: 0
stamp:
secs: 1522478992
nsecs: 153096519
frame_id: "world"
child_frame_id: "/turtle1"
transform:
translation:
x: 5.544444561
y: 5.544444561
z: 0.0
rotation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
---
transforms:
-
header:
seq: 0
stamp:
secs: 1522478992
nsecs: 153158745
frame_id: "world"
child_frame_id: "/turtle2"
transform:
translation:
x: 5.544444561
y: 7.544444561
z: 0.0
rotation:
x: 0.0
y: -0.0
z: -0.80428755301
w: 0.594240298258
---
所有的节点图:
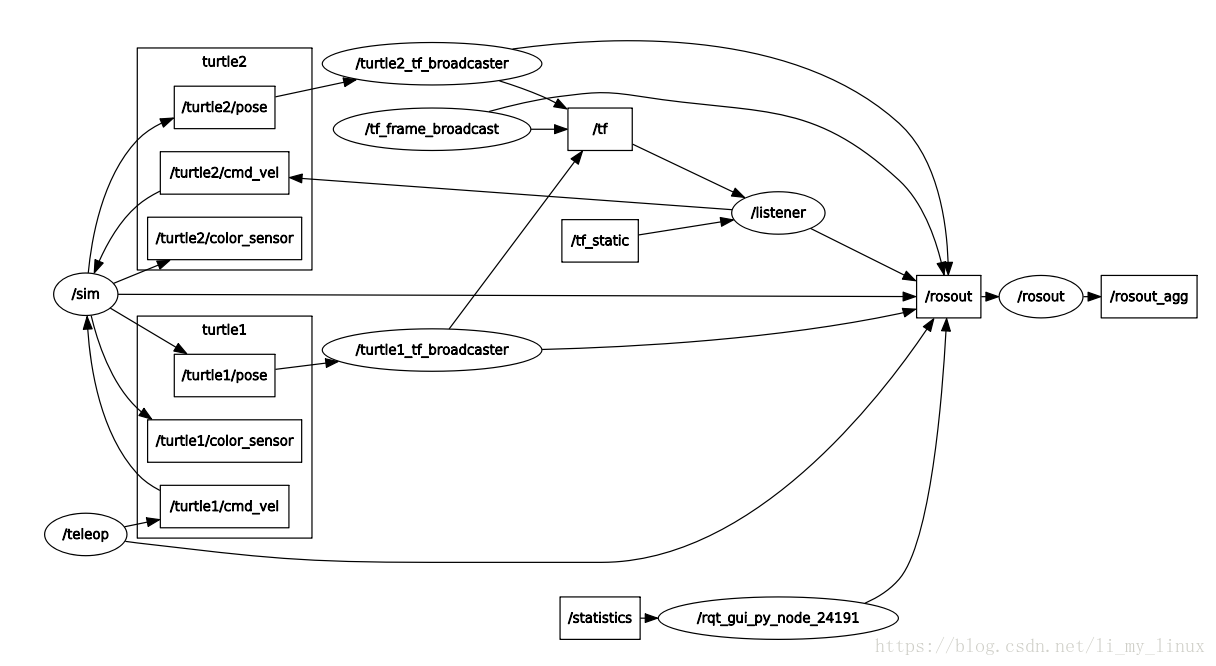
由节点图可以看出:
turtle1和turtle2都将相应的坐标系广播到tf话题上;
listener收听tf,从而得出turtle2相对于turtle1的坐标系变换transform 。
tf调试:
rosrun tf view_frames
生成pdf版的tf tree
rosrun tf tf_echo turtle2 turtle1显示两个坐标之间的关系。















 4627
4627











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









