







 本文介绍了PID过程控制算法,包括调节器的概念、PID的工作原理及三个组成部分:比例P、积分I和微分D的作用。比例环节对偏差即时反应,积分环节消除静态误差,微分环节预见偏差趋势。文章还提及了PID系数的调节方法,并预告了下篇将深入讨论参数整定。
本文介绍了PID过程控制算法,包括调节器的概念、PID的工作原理及三个组成部分:比例P、积分I和微分D的作用。比例环节对偏差即时反应,积分环节消除静态误差,微分环节预见偏差趋势。文章还提及了PID系数的调节方法,并预告了下篇将深入讨论参数整定。
本篇文章中,我们将粗略的了解一下PID过程控制算法,涉及到一下概念和几个分立算法。
PID是什么?
在弄清除PID之前,我们先理解一个概念:调节器。调节器是干什么的?调节器就是人的大脑,就是一个调节系统的核心。任何一个控制系统,只要具备了带有PID的大脑或者说是控制方法,那它就是自动调节系统。基本的调节器具有两个输入量:被调量和设定量。被调量和设定量。被调量就是反映调节对象的实际波动的量值。设定量是人们设定的量,也就是人们期望被调量需要达到的值。被调量肯定是经常变化的。而设定量可以是固定的,也可以是经常变化的。基本的调节器至少有一个模拟量输出。为了思考方便,咱们只要记住这三个量:设定量、 被调量、输出指令。为了描述方便,我们精简为两个量:输入偏差和输出指令。输入偏差是被调量和设定量之间的差值。
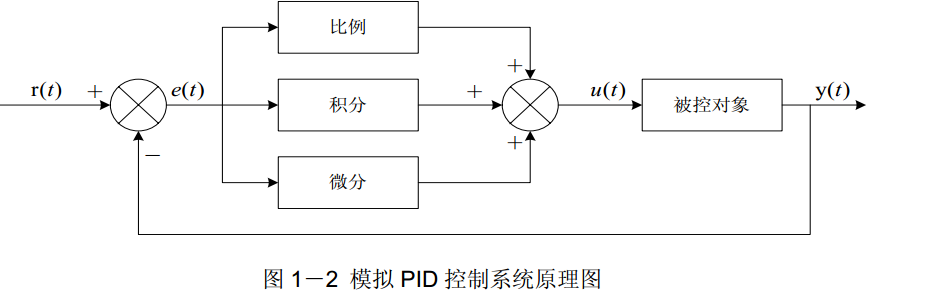
PID是一个闭环控制算法,因此要实现PID算法,必须在硬件上具有闭环系统,也就是得有反馈。下面我门看一张PID控制系统的框架图。如下:
1、比例P,就是输入偏差乘以一个系数。
比例环节的作用是对偏差瞬间做出反应。偏差一旦产生控制器立即产生控制作用,使控制量向减小偏差的方向变化。控制作用的强弱取决于比例系统Kp,比例系数Kp越
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3179
3179

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









