







引言
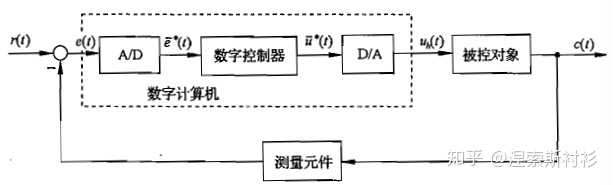
在我们的日常生活中,稍微注意,便可发现控制理论的运用及实践无处不在,从每天所用的手机、电脑以及汽车等等,都是一个个复杂的控制系统。为了保持系统的稳定、可控,反馈必不可少,通过反馈使得系统成为一个闭环系统(close loop),而通过控制则可使系统实现我们预期的状态,如图便是一个常见的闭环反馈控制系统框图[1]。
PID(比例-积分-微分)控制作为应用最广(95%)的控制算法,以至于很多人对于控制的理解就是PID。虽不正确,但足以说明其价值。因此,深刻了解其数学原理及具体实现,具有十分重要的意义。
控制算法的实现,必然会涉及到s域->z域->时域的变换,可通过专栏的另一篇文章《一阶低通滤波(LPF)的原理及应用(以APM/PX4飞控为例)》了解从s域到最终的数字实现的过程。
目录:
—————————————————
1、离散化方法
2、PID控制器的数学描述
3、PID控制器的算法实现及实例
4、PID控制器对系统性能的影响
—————————————————
问题:
阅读完本文后,可以思考两个问题。
1、在飞控的具体应用中,当加入微分控制作用时,为何还要另外引入一个一阶低通滤波器?这样做的目的是为了什么?
2、在使用一阶低通滤波器时,其截止频率选择的依据是什么?
一、离散化方法
为什么要离散化?
随着数字控制技术的不断发展,控制器的实现越来越多地采用数字控制,而实际的系统是一个连续的系统(s域),为了实现数字数字控制,这其中必然涉及到连续域(s域)到数字域(z域)的转换,即我们所说的离散化方法。
模拟调节器的离散化方法有很多,下面介绍几种常用的离散化方法。
- 差分变换法
- 零阶保持器法
- 双线性变换法
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2162
2162











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









