







 本文探讨了轻型机械臂的选型问题,包括主要选型参数。研究了国际公司如ABB的YuMi、KUKA的LBR iiwa、Universal Robots的UR5以及国内高校和企业的成果,如新松的SCR5。文章还提到了轻型机械臂在人机协作、轻量化设计和安全性方面的进步,并概述了研究热点如仿真技术。
本文探讨了轻型机械臂的选型问题,包括主要选型参数。研究了国际公司如ABB的YuMi、KUKA的LBR iiwa、Universal Robots的UR5以及国内高校和企业的成果,如新松的SCR5。文章还提到了轻型机械臂在人机协作、轻量化设计和安全性方面的进步,并概述了研究热点如仿真技术。
轻型机械臂
选型问题
工业机器人通常是由机器人本体以及末端执行器组成。在工业机器人的应用过程中,通常是对机器人本体进行符合使用条件的选型,末端执行器则是针对不同的使用行业以及环境进行定制。
对于机器人本体的选型,主要的选型参数为应用场景、自由度、重复定位精度、有效负载、工作半径以及本体重量等。
链接: 工业机器人应用与选型知多少?
研究公司和高校
国际公司
- ABB 公司
YuMi 是瑞士 ABB 公司首款真正实现人机协作的双臂机器人,并且获得了美国保险商实验室(Underwriters Laboratories)的安全认证[17]。
如下图所示,YuMi的总体重量为 38Kg,每条轻型机械臂具有 7 个自由度,单条手臂最大负载为 0.5Kg,重复精度为 0.2mm[18]。
YuMi 对协作环境具有动态的适应性,可以与操作人员协作完成复杂任务,具有极高的协作安全性和简单的操作系统,即使是没有专业知识的使用者也可以编写一些运动程序。

-
KUKA 机器人
德国 KUKA 机器人公司推出的一款七自由度轻型机器臂
LBR iiwa 轻型机械臂有自身重量分别为 22Kg 和 30Kg 的两种规格,负载重量分别为 7Kg 和 14Kg,具有较高的负载自重比;
轻量化设计(如全铝机身等)大大减少了本体重量,更易于实现灵活精准的运动,同时降低了能耗[19];
LBR iiwa 具有冗余自由度,对于同一目标点有多种到达路径,可以实现灵活避障;拥有 3 种工作模式和更加简洁和开放的编程环境。

-
德国宇航中心(DLR)
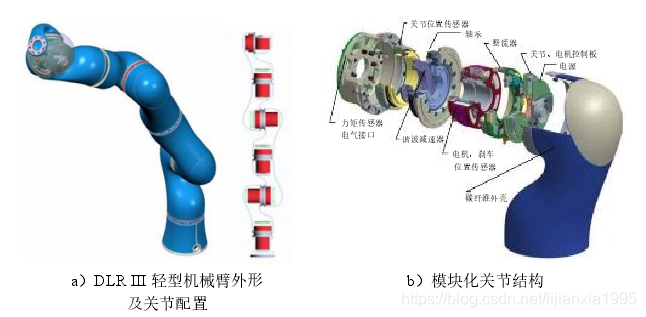
德国宇航中心(DLR)为了满足太空中工作环境的需要,设计了完全模块化的第三代轻型仿人机械臂 DLR-LWR-III[20],整体结构、关节配置与模块关节结构如图 1-5 所示。
DLR-LWR-III 具有 7 个自由度,重 14Kg,最大负载 14Kg,具有很大的负载自重比,
-
Universal Robots
丹麦机器人公司 Universal Robots 根据易于安装和使用的原则设计了 UR 机械臂,UR5 轻型机械臂如图 1-5 所示,自重 18.4Kg,末端最大负载 5Kg,可达范围850mm。
UR 机械臂的人机协作功能使得操作人员能够近距离与机器臂协同工作,一旦与外界事物发生碰撞,当特有的力传感器检测到的接触力达到设置的上限时,UR 机械臂将会自动停止工作。
此外,UR 机械臂可以通过操控交互界面上的箭头来实现机器人的移动控制,无需专业背景即可实现机械臂的简单运动调试[23]。 -
日本软银集团和法国毕宿五公司
Pepper 是一款仿人程度很高的服务机器人,由日本软银集团和法国毕宿五公司联合研发,如图 1-6 所示。
该机器人的单臂具有 5 个自由度,手爪具有 1 个自由度,可以完成握手,打招呼和跳舞等动作,现已广泛应用于商场、展会、银行、学校等场所,其机械臂结构在商用服务机器人中十分具有代表性[24]。
Pepper 的机械臂无需完成物体抓取等工作,所以整体质量很轻,运动十分灵活。
国内高校
哈尔滨工业大学
中国科学技术大学
北京交通大学
新松机器人自动化股份有限公司隶属于中国科学院,是中国机器人产业核心牵头企业之一,其研制的 SCR5 七自由度轻型机器臂如图 1-10 所示。该轻型机械臂总重 33.8Kg,负载达到 5Kg,具有较高的负载自重比,同时具备碰撞检测、视觉引导、牵引示教等功能。采用轻量化设计的机械臂节能环保,冗余自由度的存在使得避障更为灵活,整体安全性高,人机协作能力突出[28]。

参考文献
[1]齐彬. 轻型机械臂结构设计及仿人运动方法研究[D].哈尔滨工业大学,2019.
国内公司
越疆科技
DOBOT MG400是一款超小型桌面机械臂,本体底座占用面积比A4纸还小。具有灵活易部署、简单易用、安全协作的特点,专为多样化、小批量的自动化生产需求而生。最大750g负载,440mm臂长完全满足轻量级桌面应用,拖动示教、碰撞检测等人机协作特性,
有哪些著名的工业机械臂公司,高校,能介绍下么?
天眼查-机械臂公司


















 823
823

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









