






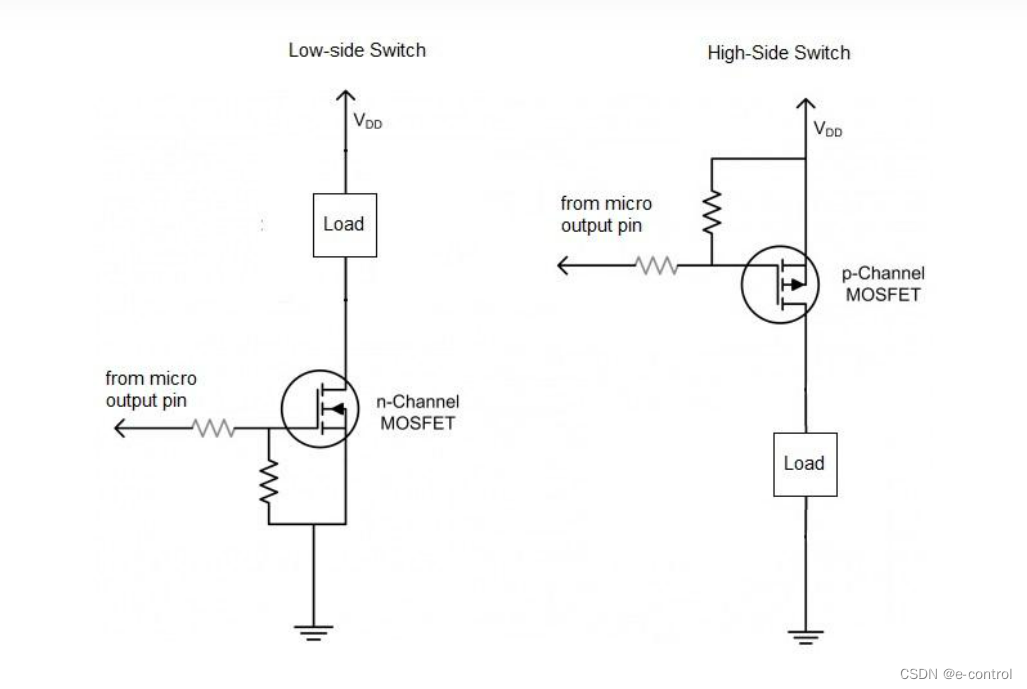
1、高、低边驱动概念
高边驱动:是在电路的电源端加了一个可控开关。高边驱动就是控制这个开关。
类似于负载接到电源正极。
低边驱动:是在电路的接地端加了一个可控开关。低边驱动就是控制这个开关。
类似于负载接地。
两者的区别是低边驱动比较容易实现,而且电路也比较简单,一般的MOS管加几个电阻、电容就可以了。
2、高、低边驱动信号:1、PWM;2、低电平(开关)
PWM:风扇、水泵、调压器
低电平:电磁阀、继电器
注意:硬件驱动类型,低边驱动硬件不能用于高边驱动
验证硬件时:注意控制器端口配置与硬件需求是否对应的上
3、 两者区别
两者的主要区别在于它们对故障状况的响应。在汽车中,由于接地的金属板无处不在,因此短地故障比短电源故障更容易发生。
短接地:
低边驱动,短地条件意味着打开负载,也就意味着负载将一直继续工作。
高边驱动,短地故障的发生将不会使能负载。
短接电源:
低边驱动:将短路至电源,负载不会被使能;
高边驱动:负载将永久开启。
具体选择哪种类型的负载驱动,需要依据系统的要求。在飞机的负载失效类型中,如果负载失效,最安全的方式是让负载继续运行下去;而对于汽车的负载应用,则正好相反。例如在发动机管理的控制单元中,很多的控制油泵的开关就是HSD。(开关接地,负载失效)这是因为在大多数的情况下,当发生短地故障时关掉油泵。这种设计对于当发生车祸或系统失效时是非常有利的。
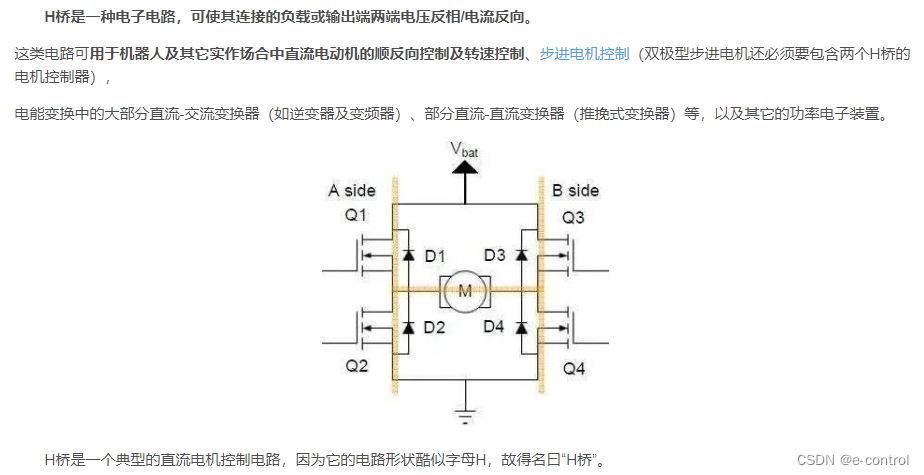
4、H桥驱动(步进电机)
H桥控制电流方向时间。1代表正传,高电平。0代表反转,低电平。

5、直流电机、步进电机

步进电机:

6、针对低边驱动
1、上电,mos管常开,控制器给到24V,FCCU给使能后被拉低,拉低为mos管断开,正常工作。
2、低边PWM也是这样,低电平为mos管断开,正常工作。
7、高边控制,上电处于断开状态。不受激励,受控状态。低边控制,上电处于工作状态,受激励。高边安全,功耗打。低边不安全,功耗小。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









