






目录
(1)在功能包文件夹下创建action文件夹,定义action文件
前言
action可以简单理解成service的升级版
一般适用于耗时的请求响应场景,以获取连续的状态反馈
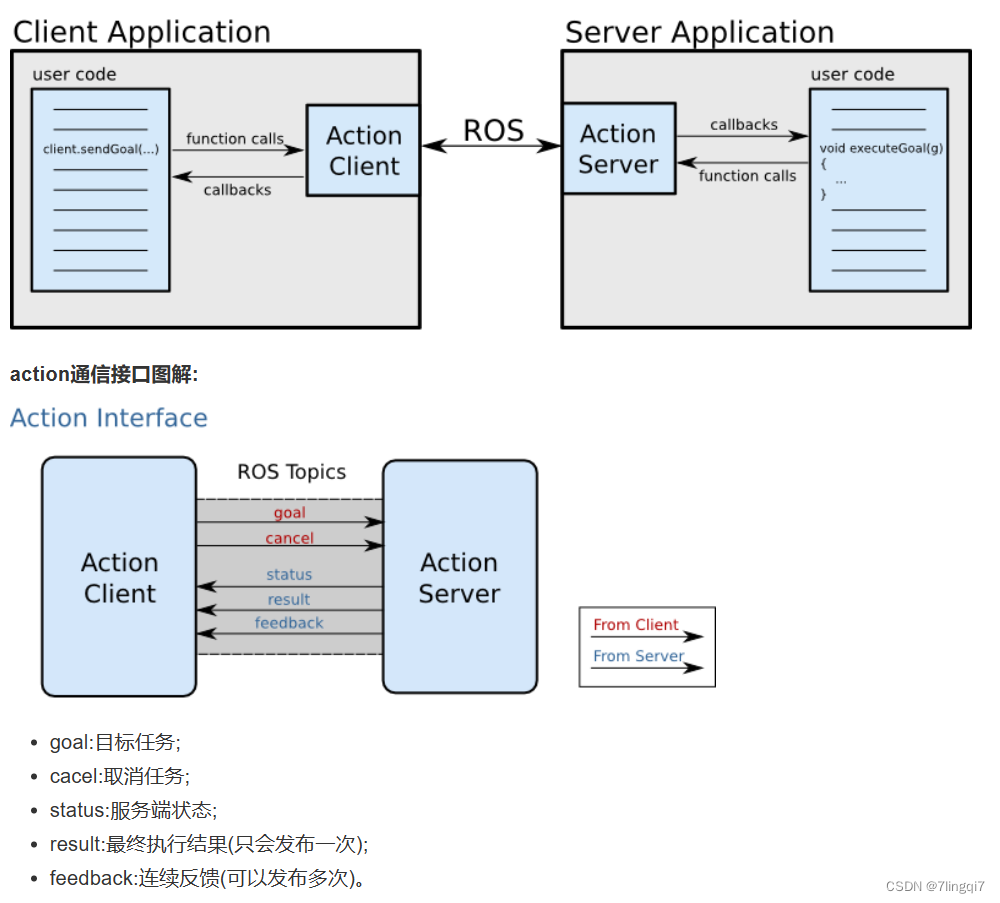
action结构图解
一,创建工作空间(略)
二,创建功能包
catkin_create_pkg task_service roscpp rospy std_msgs actionlib actionlib_msgs三,配置“环境”
(1)在功能包文件夹下创建action文件夹,定义action文件
action 文件内容组成分为三部分:请求目标值、最终响应结果、连续反馈,三者之间使用---分割示例内容如下:
int32 num
---
int32 result
---
float64 progress_percentage
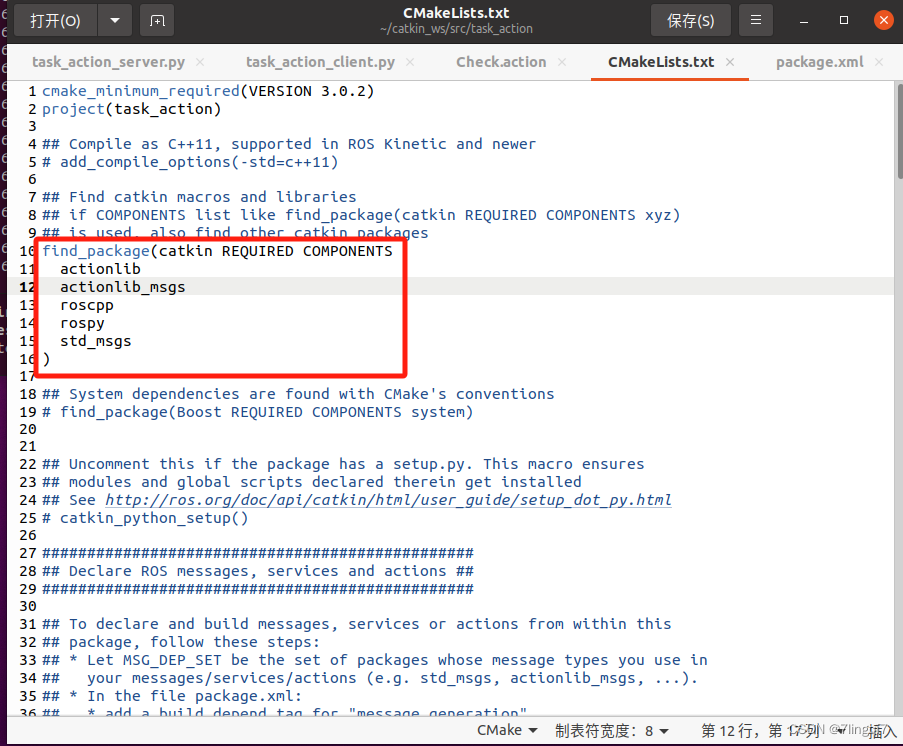
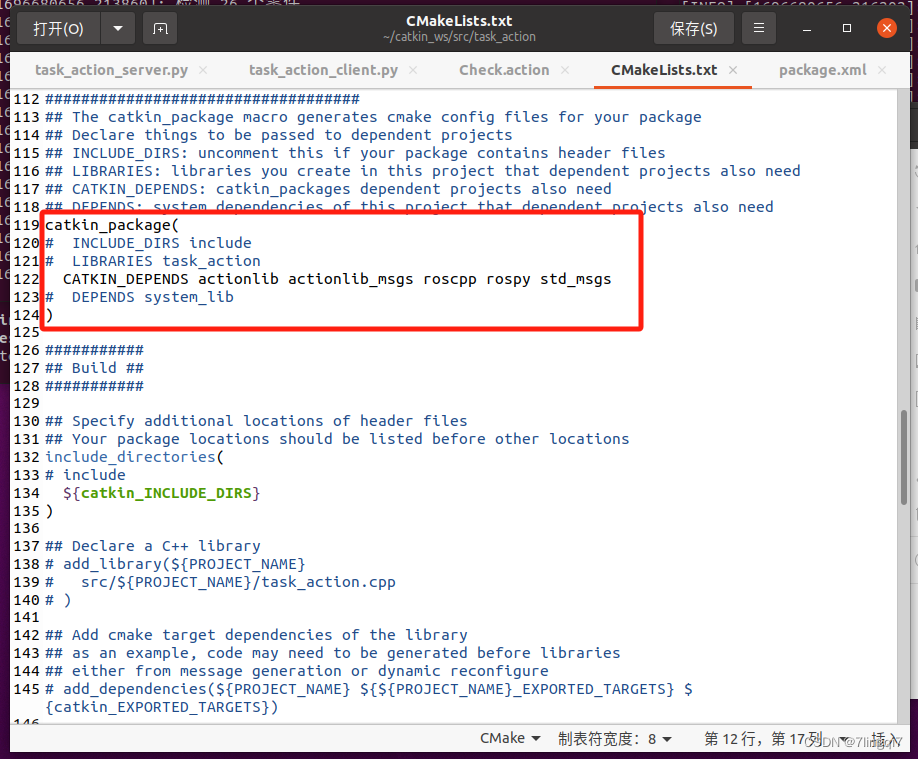
(3)在CMakeLists.txt添加编译选项
四,服务端和客户端代码编写
(1)在对应功能包的src下创建python文件(略)
(2)服务端代码
#!/usr/bin/env python3
import rospy
import actionlib
from task_action.msg import CheckAction, CheckFeedback, CheckResult
# 这里的import可以用*,也可以明确指明导入的具体类型,可读性高
class CheckServer:
def __init__(self):
# 初始化一个Action服务器
# 创建一个SimpleActionServer
# 参数1: action名字,用于匹配客户端和服务器
# 参数2: Action类型,定义goal, result, feedback的消息类型
# 参数3: 回调函数,当接收到一个新的goal时会被调用
# 参数4: auto_start参数,这里设置为False意味着需要手动调用start()
self.server = actionlib.SimpleActionServer("part_check", CheckAction, self.cb, False)
self.server.start()
rospy.loginfo("服务端启动")
def cb(self, goal):
# 总零件数
total_parts = goal.num
# 已检测的零件数
checked_parts = 0
# 初始化Feedback和Result消息
feedback = CheckFeedback()
result = CheckResult()
rate = rospy.Rate(1) # 设置频率为每秒执行一次
# 循环,直到所有零件都被检查
while checked_parts < total_parts:
checked_parts += 1
# 计算并更新进度百分比
feedback.progress_percentage = (checked_parts / float(total_parts)) * 100.0
rospy.loginfo("检测 %d 个零件", checked_parts)
# 向客户端发布进度反馈
self.server.publish_feedback(feedback)
rate.sleep()
# 设置最终的检测结果
result.result = checked_parts
self.server.set_succeeded(result)
rospy.loginfo("检测完成")
if __name__ == "__main__":
rospy.init_node("task_action_server")
server = CheckServer()
rospy.spin()(3)客户端代码
#!/usr/bin/env python3
import rospy
import actionlib
from task_action.msg import CheckAction, CheckGoal, CheckFeedback
def done_cb(state, result):
# 当目标完成时的回调
if state == actionlib.GoalStatus.SUCCEEDED:
rospy.loginfo("检测完成")
def active_cb():
# 当目标激活时的回调
rospy.loginfo("开始检测...")
def fb_cb(feedback):
# 进度反馈的回调
rospy.loginfo("%.2f%%", feedback.progress_percentage)
if __name__ == "__main__":
rospy.init_node("task_action_client")
# 创建一个Action客户端
client = actionlib.SimpleActionClient("part_check", CheckAction)
# 等待服务器准备好
client.wait_for_server()
# 设置并发送目标给服务器
goal = CheckGoal()
goal.num = 40
client.send_goal(goal, done_cb, active_cb, fb_cb)
rospy.spin()
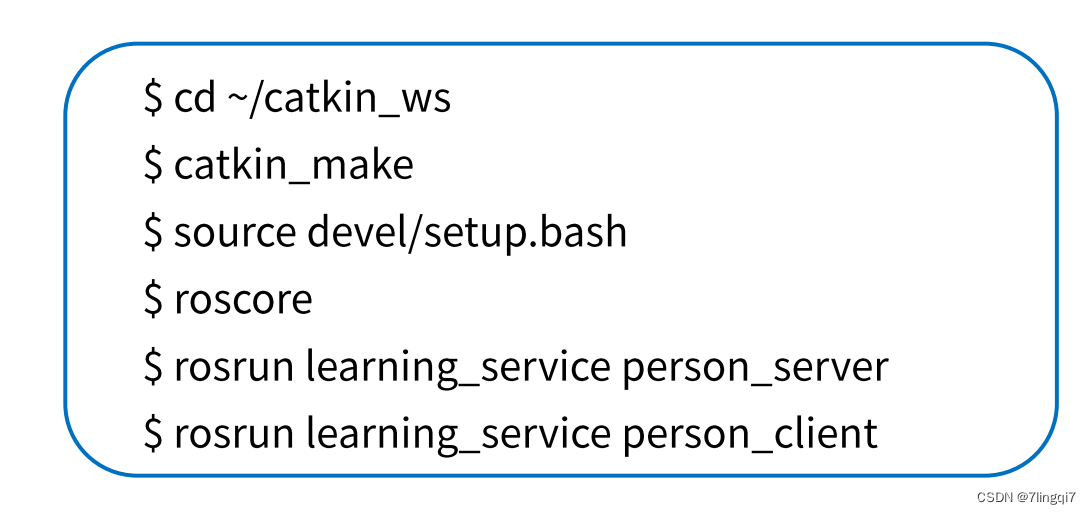
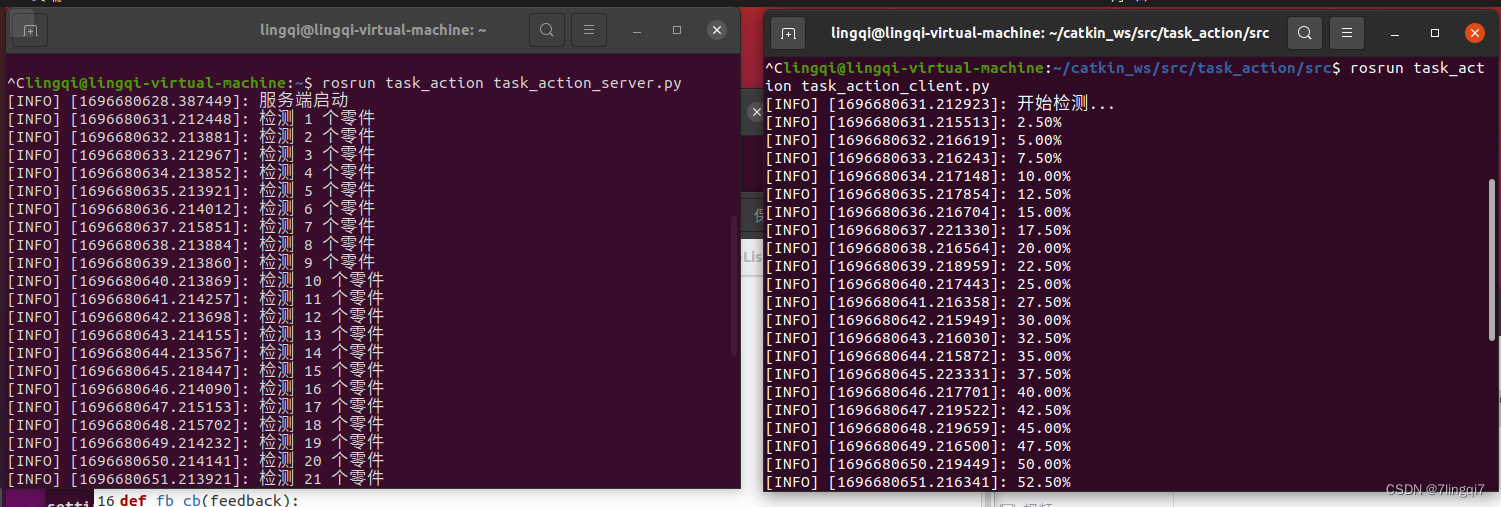
五,运行















 3584
3584











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









