







使用launch文件启动多个文件然后通过订阅乌龟的消息,实时的展示乌龟目前的运动轨迹,坐标、朝向、向速、角度,如果乌龟当前朝向是负数那么就停止收集,然后重新挂起获取参数的节点,的在获取乌龟的背景底色的数据实时展示rgb数值,
实现思路先写一个控制乌龟运动的节点,再写一个用来接收变化的节点展示目前的乌龟的参数
然后编写一个控制节点
#! /usr/bin/env python
# coding=utf8
import rospy
from geometry_msgs.msg import Twist
if __name__ == "__main__":
rospy.init_node("my_control_p")
# 乌龟运动的节点
pub = rospy.Publisher("/turtle1/cmd_vel",Twist,queue_size=10)
rata = rospy.Rate(100)
twist = Twist()
twist.linear.x = 0.5
twist.linear.y = 0.5
twist.linear.z = 0.0
twist.angular.x = 0.0
twist.angular.y = 0.0
twist.angular.z = 1
while not rospy.is_shutdown():
print("this ok")
pub.publish(twist)
rata.sleep()
接收的
#! /usr/bin/env python
# coding=utf8
import rospy
from std_msgs.msg import String
from turtlesim.msg import Pose
def Domessage(pose):
rgb = rospy.get_param("/turtlesim")
print("Red:{},Green{},blue{}".format(rgb['background_r'],rgb['background_g'],rgb['background_b']))
# dict1 = rospy.get_param("gui")
# print(dict1)
# print(" 目前坐标{:.2f} ,{:.2f},朝向:{:.2f},向速:{:.2f}角度:{:.2f}".format(dict1['x'],dict1['y'],dict1['theta'],dict1["linear_velocity"],dict1['angular_velocity']))
print(" 目前坐标{:.2f} ,{:.2f},朝向:{:.2f},向速:{:.2f}角度:{:.2f}".format(pose.x,pose.y,pose.theta,pose.linear_velocity,pose.angular_velocity))
if pose.theta < 0 :
print("-----")
rospy.signal_shutdown("get_set_parmas")
# 关闭 当前 get_set_parmas 节点
# pose.x,pose.y,pose.theta,pose.linear_velocity,pose.angular_velocity)
if __name__ == "__main__":
rospy.init_node("get_set_parmas")
sub = rospy.Subscriber("/turtle1/pose",Pose,Domessage,queue_size=100)
rospy.spin()
编写完之后通过launch文件进行启动通过观察命令行展示出来的信息即可
<launch>
<!-- name是节点名字 pkg是ros包名(自己创建的) type 是启动的文件 output用于输出/打印 至命令行-->
<node name="set_message" pkg="one_project" type="move_get.py" />
<!-- <node name="get_message" pkg="one_project" type="ome.py" output="screen"/> -->
<!-- respawn ="true" 使僵死的节点重新挂起 -->
<node name="get_set_message" pkg="one_project" type="get_set_param.py" output="screen" respawn="true"/>
</launch>效果:
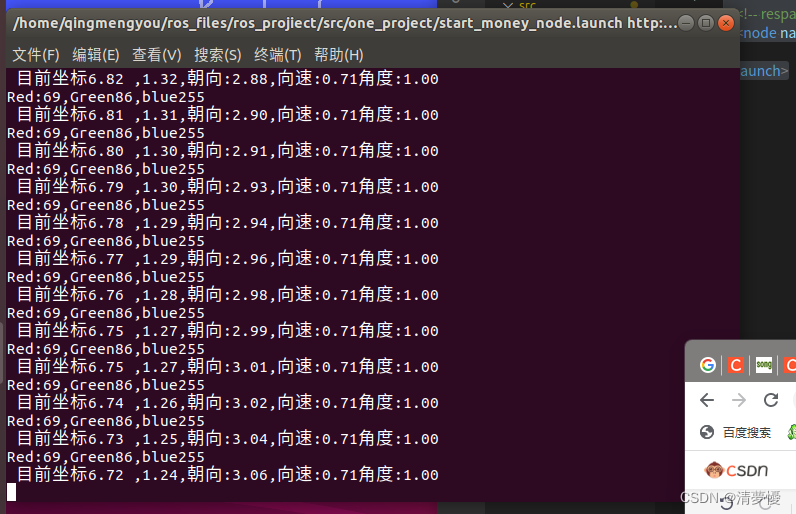
清楚的看到一些乌龟的运动信息当然也可以不编写自动画圆的文件起一个手动的也行
使用命令 rosrun turtlesim turtle_teleop_key 键盘录入信息然后实时展示信息如

这样就能简单的实现一个订阅乌龟运动轨迹的一个小功能















 2962
2962











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











