






基于坐标变换的ros海龟跟随学习记录
本文用于记录ros海龟跟随的实验,不使用tf广播变换跟随事例,旨在理解坐标变换在实际项目中的应用。
接下来就是代码环节
1、调用相关库
程序需要用到生成乌龟的服务、发布Twist消息来控制小海龟、获取海龟位置信息
于是我们调用Spawn、Twist以及Pose
#!/usr/bin/env python3
#程序功能:第二个乌龟跟随第一个乌龟运动
import sys
import rospy
import math
from turtlesim.srv import Spawn
from geometry_msgs.msg import Twist
from turtlesim.msg import Pose
2、初始化ros节点
把这个节点命名为turtle_following,这里命名随意,无伤大雅
rospy.init_node("turtle_following")
3、生成第二只小海龟,并把这个小海龟命名为ykp(默认我们在终端已经开启了turtlesim_node,也就是已经有了第一个叫做turtle1的海龟)
#生成海龟
rospy.wait_for_service('/spawn')
client = rospy.ServiceProxy('/spawn',Spawn)
response = client(1.0,1.0,0,"ykp") #返回name
rospy.loginfo("turtle_name = %s",response)
4、声明一个发布者,准备向ykp这只小海龟发布话题
pub = rospy.Publisher('/ykp/cmd_vel',Twist,queue_size=10)
5、接下来就是订阅海龟的位姿并触发中断回调函数
rospy.Subscriber('/turtle1/pose',Pose,turtlesimInfoCallback1)
rospy.Subscriber('/ykp/pose',Pose,turtlesimInfoCallback2)
可以看到我们将turtle1,也就是第一只小海龟的订阅回调函数取名为了turtlesimInfoCallback1;将第二只小海龟的订阅回调函数取名为了turtlesimInfoCallback2。
6、顺理成章,我们需要写两个回调函数的内容
先来看第一个海龟turtle1,这只海龟会作为我们用键盘来控制“跑”的海龟,所以只需要能够实时获取这只海龟的位姿就足够了
哦对,忘记说了 补充一下我们首先在最开始声明三个全局变量,因为我们需要在回调函数中也用到这些变量
global pose1 #第一个海龟的位姿
global pose2 #第二个海龟的位姿
global pub #话题发布
回到正题,开始写第一个海龟的回调函数,获取位姿
def turtlesimInfoCallback1(msg):
global pose1
pose1.x = msg.x
pose1.y = msg.y
pose1.theta = msg.theta
rospy.loginfo("turtle1:x=%f,y=%f,z=%f",pose1.x,pose1.y,pose1.theta) #订阅第一个乌龟的姿态
获取到第一只海龟位姿后,那么turtle1的任务现在就完成了 接下来是全文的重点部分,也就是第二只海龟的回调函数。
任务:获取自身的坐标/位姿,并通过turtle1的位姿来向ykp发布话题,使得ykp能够成功跟上turtle1
我们将问题慢慢拆分开:
1、获取ykp的位姿
#订阅第二个乌龟的姿态 并向其发送运动指令
def turtlesimInfoCallback2(msg):
global pose2
pose2.x = msg.x
pose2.y = msg.y
pose2.theta = msg.theta
rospy.loginfo("turtle2:x=%f,y=%f,z=%f",pose2.x,pose2.y,pose2.theta) #第二个乌龟的姿态
接下来进入重点部分
2、根据turtle1来调整ykp的位置
首先定义三个变量来存储 旋转分量、偏移分量以及最终位置分量
rotated = Pose() #旋转
deviation =Pose() #偏移
end_pose =Pose() #最终
为了后面代码的简洁,定义s和c两个变量,分别表示sin和cos
c = math.cos(pose2.theta) #cos
s = math.sin(pose2.theta) #sin
用图示来直观感受一下旋转矩阵和偏移矩阵
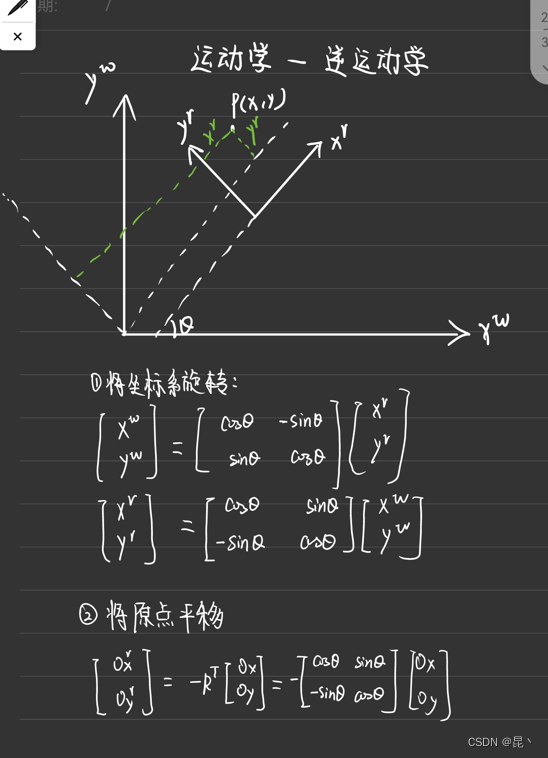
xr、yr的旋转矩阵代表的就是海龟1在海龟2坐标系下的坐标,而下面的偏移矩阵则是坐标原点的偏移。
所以将旋转矩阵和偏移矩阵用代码表示。
rotated.x = c*pose1.x+s*pose1.y
rotated.y = -1*s*pose1.x+c*pose1.y
rospy.loginfo("rotated:x=%f,y=%f",rotated.x,rotated.y) #海龟1 在海龟2坐标系下的 坐标
deviation.x = -1*(c*pose2.x+s*pose2.y)
deviation.y = -1*((-1)*s*pose2.x+c*pose2.y)
rospy.loginfo("deviation:x=%f,y=%f",deviation.x,deviation.y) #原点到海龟2的距离
最终的位置=旋转分量+偏移分量
end_pose.x=rotated.x+deviation.x #旋转+偏移
end_pose.y=rotated.y+deviation.y
rospy.loginfo("end_pose:x=%f,y=%f",end_pose.x,end_pose.y)
速度和距离成线性关系,所以线速度=k*距离
角度则可以用x,y的正切表示 前面也可以用k倍来调整旋转的速度,k值越大,旋转的越快。
最后再将ykp海龟的速度信息发布出去就大功告成了~
vel_msg = Twist()
vel_msg.linear.x = 0.5*math.sqrt(end_pose.x * end_pose.x + end_pose.y * end_pose.y)
vel_msg.angular.z = 4*math.atan2(end_pose.y,end_pose.x)
pub.publish(vel_msg) #发布速度信息 使第二个乌龟运动
乌龟跟随效果展示
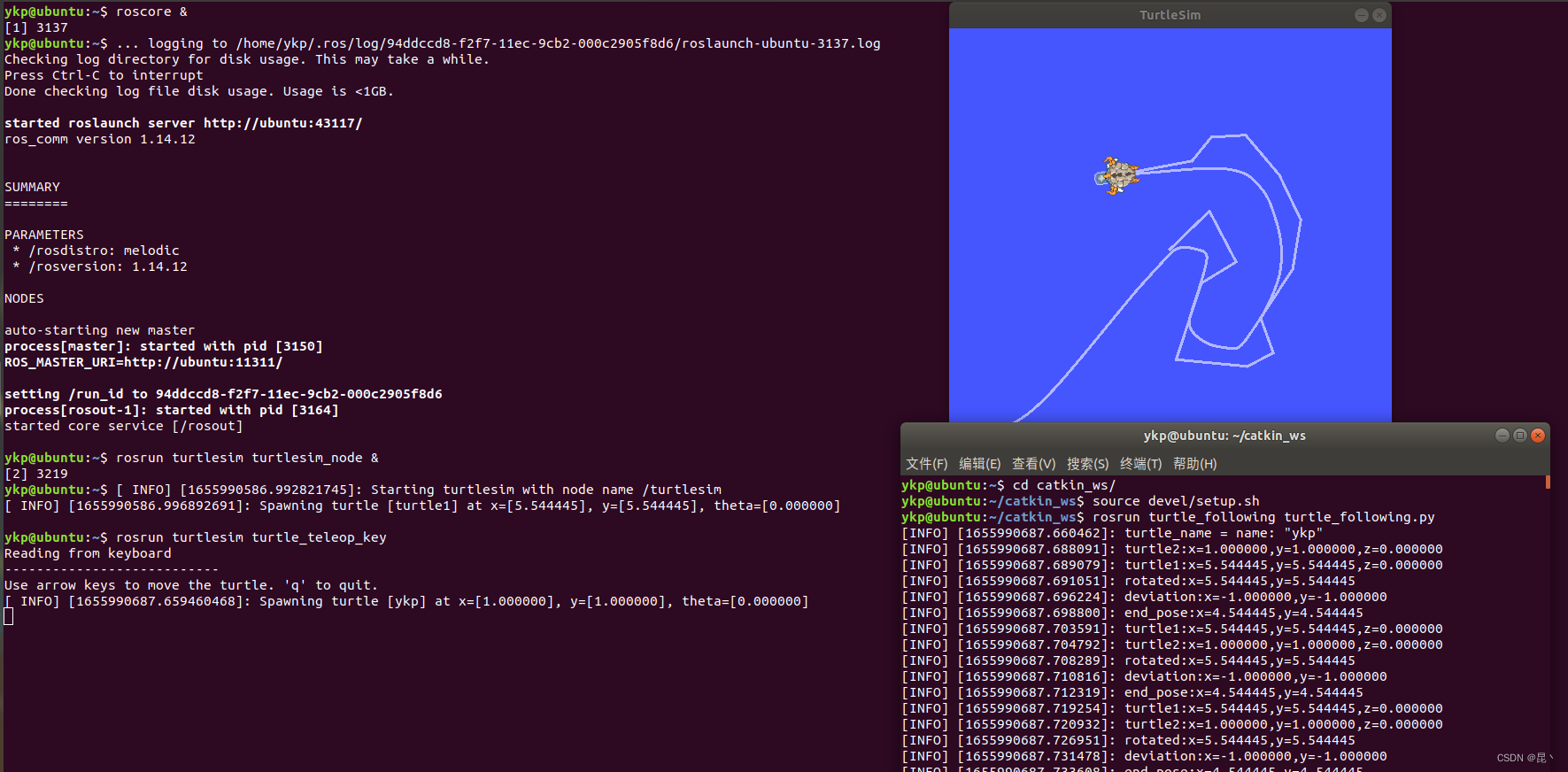
现将完整代码贴图如下
#!/usr/bin/env python3
#程序功能:第二个乌龟跟随第一个乌龟运动
import sys
import rospy
import math
from turtlesim.srv import Spawn
from geometry_msgs.msg import Twist
from turtlesim.msg import Pose
from turtlesim.srv import Kill
global pose1
global pose2
global pub
def turtlesimInfoCallback1(msg):
global pose1
pose1.x = msg.x
pose1.y = msg.y
pose1.theta = msg.theta
rospy.loginfo("turtle1:x=%f,y=%f,z=%f",pose1.x,pose1.y,pose1.theta) #订阅第一个乌龟的姿态
#订阅第二个乌龟的姿态 并向其发送运动指令
def turtlesimInfoCallback2(msg):
global pose2
pose2.x = msg.x
pose2.y = msg.y
pose2.theta = msg.theta
rospy.loginfo("turtle2:x=%f,y=%f,z=%f",pose2.x,pose2.y,pose2.theta) #第二个乌龟的姿态
rotated = Pose() #旋转
deviation =Pose() #偏移
end_pose =Pose() #最终
c = math.cos(pose2.theta) #cos
s = math.sin(pose2.theta) #sin
rotated.x = c*pose1.x+s*pose1.y
rotated.y = -1*s*pose1.x+c*pose1.y
rospy.loginfo("rotated:x=%f,y=%f",rotated.x,rotated.y) #海龟1 在海龟2坐标系下的 坐标
deviation.x = -1*(c*pose2.x+s*pose2.y)
deviation.y = -1*((-1)*s*pose2.x+c*pose2.y)
rospy.loginfo("deviation:x=%f,y=%f",deviation.x,deviation.y) #原点到海龟2的距离
end_pose.x=rotated.x+deviation.x #旋转+偏移
end_pose.y=rotated.y+deviation.y
rospy.loginfo("end_pose:x=%f,y=%f",end_pose.x,end_pose.y)
vel_msg = Twist()
vel_msg.linear.x = 0.5*math.sqrt(end_pose.x * end_pose.x + end_pose.y * end_pose.y)
vel_msg.angular.z = 4*math.atan2(end_pose.y,end_pose.x)
pub.publish(vel_msg) #发布速度信息 使第二个乌龟运动
# def turtlesim_kill():
# rospy.wait_for_service('/kill')
# kill_turtle = rospy.ServiceProxy('/kill',Kill)
# kill_name=kill_turtle("ykp")
# rospy.loginfo("kill_name = %s",kill_name)
# def turtlesim_clear():
# rospy.wait_for_service('/clear')
# clear_turtle = rospy.ServiceProxy('/clear',Empty)
# rospy.loginfo("clear_name = %s",clear_turtle)
if __name__ == "__main__":
pose1 = Pose() #给全局变量赋初值
pose2 = Pose()
rospy.init_node("turtle_following")
#turtlesim_kill() #方便调试 用于杀死上一个乌龟
#turtlesim_clear()
#生成海龟
rospy.wait_for_service('/spawn')
client = rospy.ServiceProxy('/spawn',Spawn)
response = client(1.0,1.0,0,"ykp") #返回name
rospy.loginfo("turtle_name = %s",response)
#声明一个发布者 准备向‘ykp’发送消息
pub = rospy.Publisher('/ykp/cmd_vel',Twist,queue_size=10)
#订阅乌龟位置和角度
rospy.Subscriber('/turtle1/pose',Pose,turtlesimInfoCallback1)
rospy.Subscriber('/ykp/pose',Pose,turtlesimInfoCallback2)
rospy.spin() #类似于while(1)















 852
852











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









