







LBP是Local Binary Pattern(局部二值模式)的缩写,具有灰度不变性和旋转不变性等显著优点。由于该特征的简单易算性,虽然其总体效果不如Haar特征,但速度则快于Haar,所以也得到了广泛的使用。
文章目录
LBP特征的描述
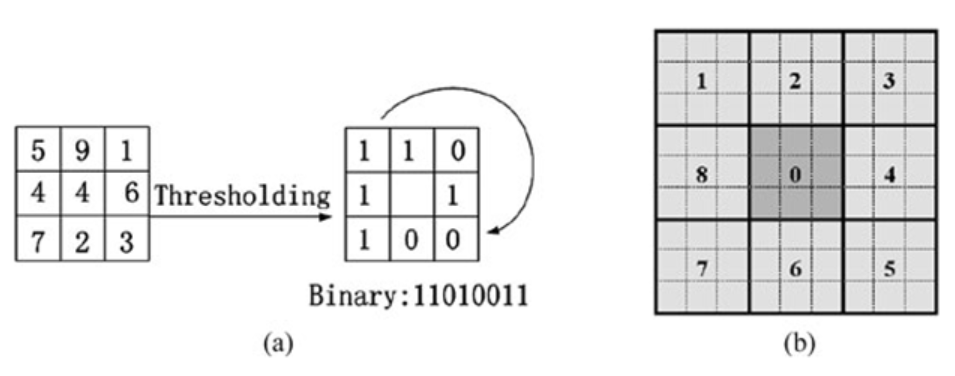
原始的LBP算子定义为在 3 ∗ 3 3*3 3∗3的窗口内,以窗口中心像素为阈值,将相邻的8个像素的灰度值与其进行比较,若周围像素值大于等于中心像素值,则该像素点的位置被标记为1,否则为0。这样, 3 ∗ 3 3*3 3∗3邻域内的8个点经比较可产生8位二进制数(通常转换为十进制数即LBP码,共256种),即得到该窗口中心像素点的LBP值,并用这个值来反映该区域的纹理信息。需要注意的是,LBP值是按照顺时针方向组成的二进制数。
LBP特征的圆形化改进
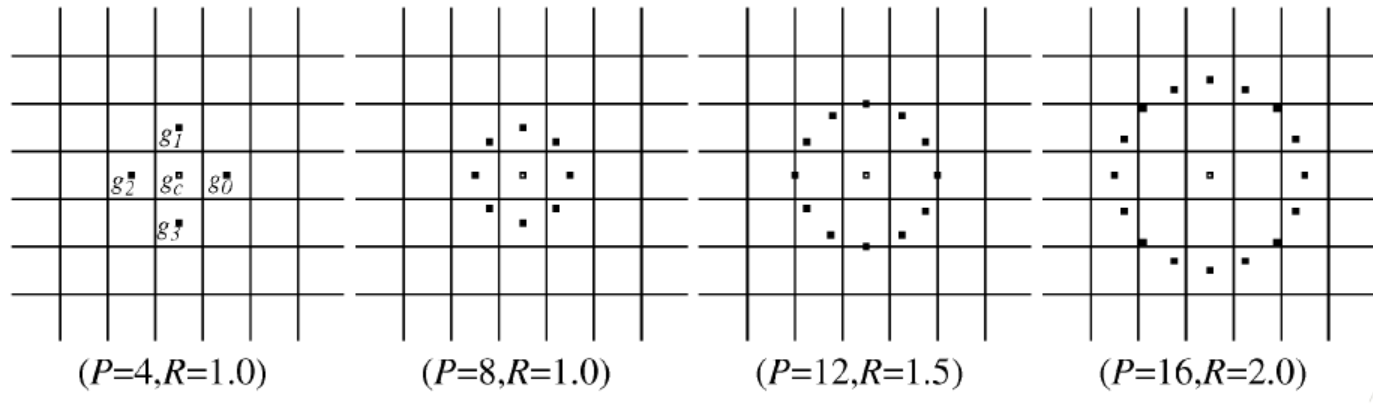
基本的 LBP算子的最大缺陷在于它只覆盖了一个固定半径范围内的小区域,这显然不能满足不同尺寸和频率纹理的需要。为了适应不同尺度的纹理特征,并达到灰度和旋转不变性的要求,Ojala等对 LBP 算子进行了改进,将 3×3邻域扩展到任意邻域,并用圆形邻域代替了正方形邻域,改进后的 LBP 算子允许在半径为 R 的圆形邻域内有任意多个像素点。从而得到了诸如半径为R的圆形区域内含有P个采样点的LBP算子,称为Extended LBP,也叫Circular LBP。
比如下图定了一个5x5的邻域:

上图内有八个黑色的采样点,每个采样点的值可以通过下式计算:
x p = x c + R cos ( 2 π p P ) x_p = x_c+R\cos( \frac{2\pi p}{P} ) xp=xc+Rcos(P2πp)
y p = y c − R sin ( 2 π p P ) y_p = y_c-R\sin( \frac{2\pi p}{P} ) yp=yc−Rsin(P2πp)
其中 ( x c , y c ) (x_c,y_c) (xc,yc)为邻域中心点, ( x p , y p ) (x_p,y_p) (xp,yp)为某个采样点。通过上式可以计算任意个采样点的坐标,但是计算得到的坐标未必完全是整数,所以可以通过双线性插值来得到该采样点的像素值:
f ( x , y ) ≈ [ 1 − x x ] [ f ( 0 , 0 ) f ( 0 , 1 ) f ( 1 , 0 ) f ( 1 , 1 ) ] [ 1 − y y ] f(x,y)\approx \begin{bmatrix} 1-x & x \\ \end{bmatrix} \begin{bmatrix} f(0,0) & f(0,1)\\ f(1,0) & f(1,1) \end{bmatrix}\begin{bmatrix} 1-y\\ y \end{bmatrix} f(x,y)≈[1−xx][f(0,0)f(1,0)f(0,1)f(1,1)][1−yy]
几种不同半径不同采样点的LBP算子:
LBP旋转不变模式
下图中的8种 LBP 模式,对应的旋转不变的 LBP模式都是00001111,即 LBP值为 15:

Uniform Pattern LBP等价模式
一个LBP算子可以产生不同的二进制模式,对于半径为R的圆形区域内含有P个采样点的LBP算子将会产生 2 P 2^P 2P种模式。为了解决二进制模式过多的问题,提高统计性,Ojala提出了采用一种“等价模式”来对LBP算子的模式种类进行降维。
Ojala等认为,在实际图像中,绝大多数LBP模式最多只包含两次从1到0或从0到1的跳变。因此,Ojala将“等价模式”定义为:当某个LBP所对应的循环二进制数从0到1或从1到0最多有两次跳变时,该LBP所对应的二进制就称为一个等价模式类。如00000000(0次跳变),00000111(只含一次从0到1的跳变),10001111(先由1跳到0,再由0跳到1,共两次跳变)都是等价模式类, 除等价模式类以外的模式都归为另一类,称为混合模式类,例如10010111(共四次跳变)。。
通过这样的改进,模式数量由原来的 2 P 2^P 2P种减少为 P ( P − 1 ) + 2 P ( P-1)+2 P(P−1)+2种,其中 P P P表示邻域集内的采样点数。对于 3 × 3 3×3 3×3邻域内8个采样点来说,二进制模式由原始的256种减少为58种, 他们对应的值按照从小到大分别编码为1-58,即它们在LBP特征图像中的灰度值为1-58,而除了等价模式类之外的混合模式类被编码为0,即它们在LBP特征中的灰度值为0,因此等价模式LBP特征图像整体偏暗。这使得特征向量的维数更少,并且可以减少高频噪声带来的影响。
LBP特征用于检测的原理
上述提取的LBP算子在每个像素点都可以得到一个LBP“编码”,那么,对一幅图像(记录的是每个像素点的灰度值)提取其原始的LBP算子之后,得到的原始LBP特征依然是“一幅图片”(记录的是每个像素点的LBP值)。
LBP的应用中,如纹理分类、人脸分析等,一般都不将LBP图谱作为特征向量用于分类识别,而是采用LBP特征谱的统计直方图作为特征向量用于分类识别。
例如:一幅 100 ∗ 100 100*100 100∗100像素大小的图片,划分为 10 ∗ 10 = 100 10*10=100 10∗10=100个子区域,也就有了 10 ∗ 10 10*10 10∗10个统计直方图,利用这 10 ∗ 10 10*10 10∗10个统计直方图,以及各种相似性度量函数,就可以判断两幅图像之间的相似性了。
MB-LBP特征
MB-LBP特征,全称为Multiscale Block LBP,在Traincascade级联目标训练检测中的LBP特征使用的就是MB-LBP。
将图像分成一个个小块(Block),每个小块再分为一个个的小区域(类似于HOG中的cell),小区域内的灰度平均值作为当前小区域的灰度值,与周围小区域灰度进行比较形成LBP特征,生成的特征称为MB-LBP。Block大小为 3 ∗ 3 3*3 3∗3且小区域的大小为1时,就是原始的LBP特征,上图的Block大小为 9 ∗ 9 9*9 9∗9,小区域的大小为 3 ∗ 3 3*3 3∗3。
作者对得到LBP特征又进行了均值模式编码,通过对得到的特征图求直方图,得到了LBP特征值0-255之间(0-255即直方图中的bin)的特征数量,通过对bin中的数值进行排序,通过权衡,将排序在前63位的特征值看作是等价模式类,其他的为混合模式类,总共64类,作者在论文中称之为SEMB-LBP(Statistically Effective MB-LBP )。类似于等价模式LBP,等价模式的LBP的等价模式类为58种,混合模式类1种,共59种。二者除了等价模式类的数量不同之外,主要区别在于:对等价模式类的定义不同,等价模式LBP是根据0-1的跳变次数定义的,而SEMB-LBP是通过对直方图排序得到的。
总结:MB-LBP有点类似于先将图像进行平滑处理,然后再求LBP特征。而SEMB-LBP是在MB-LBP进行编码后的图像。类似于等价模式LBP,先求LBP特征,再用等价模式进行编码。当Scale=3时,MB-LBP和SEMB-LBP就是LBP和等价模式LBP。
LBPH,图像的LBP特征向量
LBPH,Local Binary Patterns Histograms,即LBP特征的统计直方图,LBPH将LBP特征与图像的空间信息结合在一起。将LBP特征图像分成m个局部块,并提取每个局部块的直方图,然后将这些直方图依次连接在一起形成LBP特征的统计直方图,即LBPH。
一幅图像具体的计算LBPH的过程(以Opencv中的人脸识别为例):
-
计算图像的LBP特征图像。
-
将LBP特征图像进行分块,Opencv中默认将LBP特征图像分成8行8列64块区域
-
计算每块区域特征图像的直方图cell_LBPH,将直方图进行归一化,直方图大小为 1 ∗ n u m P a t t e r n s 1*numPatterns 1∗numPatterns
-
将每块区域的直方图按空间顺序依次排列成一行,形成LBP特征向量,大小为 1 ∗ ( n u m P a t t e r n s ∗ 64 ) 1*(numPatterns*64) 1∗(numPatterns∗64)
-
用机器学习的方法对LBP特征向量进行训练,用来检测和识别目标
举例说明LBPH的维度:
采样点为8个,如果用的是原始的LBP或Extended LBP特征,其LBP特征值的模式为256种,则一幅图像的LBP特征向量维度为:
64
∗
256
=
16384
64*256=16384
64∗256=16384维,而如果使用的UniformPatternLBP特征,其LBP值的模式为59种,其特征向量维度为:
64
∗
59
=
3776
64*59=3776
64∗59=3776维,可以看出,使用等价模式特征,其特征向量的维度大大减少,这意味着使用机器学习方法进行学习的时间将大大减少,而性能上没有受到很大影响。Opencv的人脸识别使用的是Extended LBP。
LBP算子的优缺点
优点:
-
一定程度上消除了光照变化的问题
-
具有旋转不变性
-
纹理特征维度低,计算速度快
缺点:
-
当光照变化不均匀时,各像素间的大小关系被破坏,对应的LBP算子也就发生了变化。
-
通过引入旋转不变的定义,使LBP算子更具鲁棒性。但这也使得LBP算子丢失了方向信息。
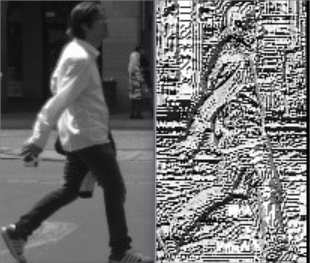
计算原始LBP特征值
import cv2
import numpy as np
def origin_LBP(img):
dst = np.zeros(img.shape,dtype=img.dtype)
h,w=img.shape
for i in range(1,h-1):
for j in range(1,w-1):
center = img[i][j]
code = 0
code |= (img[i-1][j-1] >= center) << (np.uint8)(7)
code |= (img[i-1][j ] >= center) << (np.uint8)(6)
code |= (img[i-1][j+1] >= center) << (np.uint8)(5)
code |= (img[i ][j+1] >= center) << (np.uint8)(4)
code |= (img[i+1][j+1] >= center) << (np.uint8)(3)
code |= (img[i+1][j ] >= center) << (np.uint8)(2)
code |= (img[i+1][j-1] >= center) << (np.uint8)(1)
code |= (img[i ][j-1] >= center) << (np.uint8)(0)
dst[i-1][j-1]= code
return dst
gray = cv2.imread('C:/Users/Ivy/Desktop/a.jpg', cv2.IMREAD_GRAYSCALE)
cv2.imshow('img', gray)
org_lbp = origin_LBP(gray)
cv2.imshow('org_lbp', org_lbp)
cv2.waitKey(0)
计算圆形LBP特征值
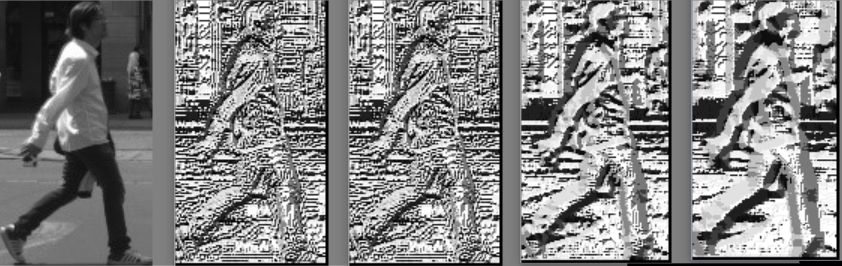
半径越小,图像纹理越精细, 邻域数目越小,图像亮度越低。
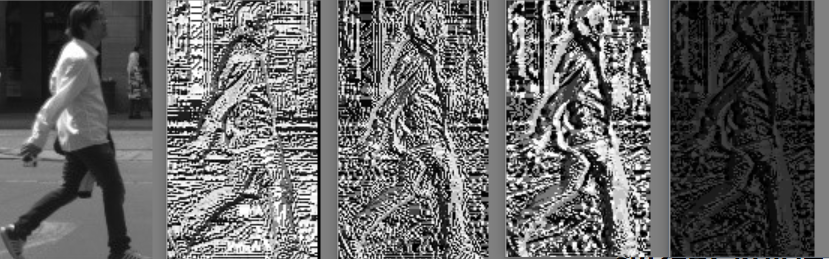
原始图 / 原始LBP / 圆形R1P8 / 圆形R3P8 / 圆形R3P6
import cv2
import numpy as np
def circular_LBP(img, radius=3, neighbors=8):
h,w=img.shape
dst = np.zeros((h-2*radius, w-2*radius),dtype=img.dtype)
for k in range(neighbors):
# 计算采样点对于中心点坐标的偏移量rx,ry
rx = radius * np.cos(2.0 * np.pi * k / neighbors)
ry = -(radius * np.sin(2.0 * np.pi * k / neighbors))
# 为双线性插值做准备
# 对采样点偏移量分别进行上下取整
x1 = int(np.floor(rx))
x2 = int(np.ceil(rx))
y1 = int(np.floor(ry))
y2 = int(np.ceil(ry))
# 将坐标偏移量映射到0-1之间
tx = rx - x1
ty = ry - y1
# 根据0-1之间的x,y的权重计算公式计算权重,权重与坐标具体位置无关,与坐标间的差值有关
w1 = (1-tx) * (1-ty)
w2 = tx * (1-ty)
w3 = (1-tx) * ty
w4 = tx * ty
for i in range(radius,h-radius):
for j in range(radius,w-radius):
# 获得中心像素点的灰度值
center = img[i,j]
# 根据双线性插值公式计算第k个采样点的灰度值
neighbor = img[i+y1,j+x1] * w1 + img[i+y2,j+x1] *w2 + img[i+y1,j+x2] * w3 +img[i+y2,j+x2] *w4
# LBP特征图像的每个邻居的LBP值累加,累加通过与操作完成,对应的LBP值通过移位取得
dst[i-radius,j-radius] |= (neighbor>center) << (np.uint8)(neighbors-k-1)
return dst
gray = cv2.imread('C:/Users/Ivy/Desktop/a.jpg', cv2.IMREAD_GRAYSCALE)
cv2.imshow('img', gray)
circul_1_8 = circular_LBP(gray,1,8)
circul_3_8 = circular_LBP(gray,3,8)
circul_3_6 = circular_LBP(gray,3,6)
cv2.imshow('18', circul_1_8)
cv2.imshow('38', circul_3_8)
cv2.imshow('36', circul_3_6)
cv2.waitKey(0)
计算旋转不变圆形LBP特征值

原始图 / 原始LBP / 圆形R3P8 / 旋转不变R3P8
import cv2
import numpy as np
def rotation_invariant_LBP(img, radius=3, neighbors=8):
h,w=img.shape
dst = np.zeros((h-2*radius, w-2*radius),dtype=img.dtype)
for k in range(neighbors):
# 计算采样点对于中心点坐标的偏移量rx,ry
rx = radius * np.cos(2.0 * np.pi * k / neighbors)
ry = -(radius * np.sin(2.0 * np.pi * k / neighbors))
# 为双线性插值做准备
# 对采样点偏移量分别进行上下取整
x1 = int(np.floor(rx))
x2 = int(np.ceil(rx))
y1 = int(np.floor(ry))
y2 = int(np.ceil(ry))
# 将坐标偏移量映射到0-1之间
tx = rx - x1
ty = ry - y1
# 根据0-1之间的x,y的权重计算公式计算权重,权重与坐标具体位置无关,与坐标间的差值有关
w1 = (1-tx) * (1-ty)
w2 = tx * (1-ty)
w3 = (1-tx) * ty
w4 = tx * ty
for i in range(radius,h-radius):
for j in range(radius,w-radius):
# 获得中心像素点的灰度值
center = img[i,j]
# 根据双线性插值公式计算第k个采样点的灰度值
neighbor = img[i+y1,j+x1] * w1 + img[i+y2,j+x1] *w2 + img[i+y1,j+x2] * w3 +img[i+y2,j+x2] *w4
# LBP特征图像的每个邻居的LBP值累加,累加通过与操作完成,对应的LBP值通过移位取得
dst[i-radius,j-radius] |= (neighbor>center) << (np.uint8)(neighbors-k-1)
# 进行旋转不变处理
for i in range(dst.shape[0]):
for j in range(dst.shape[1]):
currentValue = dst[i,j]
minValue = currentValue;
for k in range(1, neighbors):
# 循环左移
temp = (np.uint8)(currentValue>>(neighbors-k)) | (np.uint8)(currentValue<<k)
if temp < minValue:
minValue = temp
dst[i,j] = minValue
return dst
gray = cv2.imread('C:/Users/Ivy/Desktop/a.jpg', cv2.IMREAD_GRAYSCALE)
cv2.imshow('img', gray)
rotation_invariant = rotation_invariant_LBP(gray,3,8)
cv2.imshow('ri', rotation_invariant)
cv2.waitKey(0)
计算Uniform Pattern LBP特征值


原始图 / 圆形R3P8 / 旋转不变R3P8 / UPLBP,R3P8 / UPLBP,R3P8增强亮度显示
import cv2
import numpy as np
def uniform_pattern_LBP(img,radius=3, neighbors=8):
h,w=img.shape
dst = np.zeros((h-2*radius, w-2*radius),dtype=img.dtype)
# LBP特征值对应图像灰度编码表,直接默认采样点为8位
temp = 1
table =np.zeros((256),dtype=img.dtype)
for i in range(256):
if getHopTimes(i)<3:
table[i] = temp
temp+=1
# 是否进行UniformPattern编码的标志
flag = False
# 计算LBP特征图
for k in range(neighbors):
if k==neighbors-1:
flag = True
# 计算采样点对于中心点坐标的偏移量rx,ry
rx = radius * np.cos(2.0 * np.pi * k / neighbors)
ry = -(radius * np.sin(2.0 * np.pi * k / neighbors))
# 为双线性插值做准备
# 对采样点偏移量分别进行上下取整
x1 = int(np.floor(rx))
x2 = int(np.ceil(rx))
y1 = int(np.floor(ry))
y2 = int(np.ceil(ry))
# 将坐标偏移量映射到0-1之间
tx = rx - x1
ty = ry - y1
# 根据0-1之间的x,y的权重计算公式计算权重,权重与坐标具体位置无关,与坐标间的差值有关
w1 = (1-tx) * (1-ty)
w2 = tx * (1-ty)
w3 = (1-tx) * ty
w4 = tx * ty
# 循环处理每个像素
for i in range(radius,h-radius):
for j in range(radius,w-radius):
# 获得中心像素点的灰度值
center = img[i,j]
# 根据双线性插值公式计算第k个采样点的灰度值
neighbor = img[i+y1,j+x1] * w1 + img[i+y2,j+x1] *w2 + img[i+y1,j+x2] * w3 +img[i+y2,j+x2] *w4
# LBP特征图像的每个邻居的LBP值累加,累加通过与操作完成,对应的LBP值通过移位取得
dst[i-radius,j-radius] |= (neighbor>center) << (np.uint8)(neighbors-k-1)
# 进行LBP特征的UniformPattern编码
if flag:
dst[i-radius,j-radius] = table[dst[i-radius,j-radius]]
return dst
def getHopTimes(data):
'''
计算跳变次数
'''
count = 0;
binaryCode = "{0:0>8b}".format(data)
for i in range(1,len(binaryCode)):
if binaryCode[i] != binaryCode[(i-1)]:
count+=1
return count
gray = cv2.imread('C:/Users/Ivy/Desktop/a.jpg', cv2.IMREAD_GRAYSCALE)
cv2.imshow('img', gray)
uniform_pattern = uniform_pattern_LBP(gray,3,8)
cv2.imshow('up', uniform_pattern)
cv2.waitKey(0)
计算MB-LBP特征值
原始图 / 原始LBP / MBLBP 3 / MBLBP 9 / MBLBP 15
import cv2
import numpy as np
def multi_scale_block_LBP(img,scale):
h,w= img.shape
# 定义并计算积分图像
cellSize = int(scale / 3)
offset = int(cellSize / 2)
cellImage = np.zeros((h-2*offset, w-2*offset),dtype=img.dtype)
for i in range(offset,h-offset):
for j in range(offset,w-offset):
temp = 0;
for m in range(-offset,offset+1):
for n in range(-offset,offset+1):
temp += img[i+n,j+m]
temp /= (cellSize*cellSize);
cellImage[i-int(cellSize/2),j-int(cellSize/2)] = np.uint8(temp)
dst = origin_LBP(cellImage)
return dst
gray = cv2.imread('C:/Users/Ivy/Desktop/a.jpg', cv2.IMREAD_GRAYSCALE)
cv2.imshow('img', gray)
mb_3 = multi_scale_block_LBP(gray,3)
mb_9 = multi_scale_block_LBP(gray,9)
mb_15 = multi_scale_block_LBP(gray,15)
cv2.imshow('mb_3', mb_3)
cv2.imshow('mb_9', mb_9)
cv2.imshow('mb_15', mb_15)
cv2.waitKey(0)
计算图像的LBPH特征向量
def getLBPH(img_lbp,numPatterns,grid_x,grid_y,normed):
'''
计算LBP特征图像的直方图LBPH
'''
h,w=img_lbp.shape
width = int(w / grid_x)
height = int(h / grid_y)
# 定义LBPH的行和列,grid_x*grid_y表示将图像分割的块数,numPatterns表示LBP值的模式种类
result = np.zeros((grid_x * grid_y,numPatterns),dtype=float)
resultRowIndex = 0
# 对图像进行分割,分割成grid_x*grid_y块,grid_x,grid_y默认为8
for i in range(grid_x):
for j in range(grid_y):
# 图像分块
src_cell = img_lbp[i*height:(i+1)*height,j*width:(j+1)*width]
# 计算直方图
hist_cell = getLocalRegionLBPH(src_cell,0,(numPatterns-1),True)
#将直方图放到result中
result[resultRowIndex]=hist_cell
resultRowIndex+=1
return np.reshape(result,(-1))
def getLocalRegionLBPH(src,minValue,maxValue,normed):
'''
计算一个LBP特征图像块的直方图
'''
data = np.reshape(src,(-1))
# 计算得到直方图bin的数目,直方图数组的大小
bins = maxValue - minValue + 1;
# 定义直方图每一维的bin的变化范围
ranges = (float(minValue),float(maxValue + 1))
hist, bin_edges = np.histogram(src, bins=bins, range=ranges, normed=normed)
return hist
uniform_pattern = uniform_pattern_LBP(gray,3,8)
lbph = getLBPH(uniform_pattern,59,8,8,True)

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









