







声明:仅作为自己日后参考,真实项目经验,没有深入研究,没有培训过。
引用:
ROBROOT 运动系统的转换
说明 对于 ROBROOT 运动系统,机器人位于运动系统的法兰上,例如 KUKA 线性滑
轨。法兰为线性滑轨上的底板。
在进行 ROBROOT 运动系统转换时,应注意以下准则:
对于带 1 根轴的运动系统,仅考虑 $ETx_TA1KR。
对于带 2 根轴的运动系统,应考虑 $ETx_TA1KR 和 $ETx_TA2A1。
图 7-5: BASE 运动系统的转换链
旋转时必须始终遵守 A、B、C 顺序
发布日期 : 22.08.2017 版本 : KSS 8.5 configuration of kinema
对于带 3 根轴的运动系统,应考虑 $ETx_TA1KR、$ETx_TA2A1 和
$ETx_TA3A2。
$ETx_FLA3 描述了机器人在运动系统 FLANGE 坐标系中的位移和姿态且将
始终被考虑。
操作步骤 此处以单轴 ROBROOT 运动系统为例 (即线性滑轨)说明转换。
1. 确定运动系统的基点。
2. 从运动系统的基点开始,将坐标系移至运动系统的法兰中心点 (在 X、Y
和 Z 向上平移)。
3. 在此转动坐标系,使正 Z 方向指向移动方向(围绕转角 A、B、C 旋转)。
4. 转动坐标系,使 X 轴从机器人的插头连接板指向正向。
$ET1_TA1KR
说明 外部转换 ET1 第 1 根转换轴的位置
结构类型 FRAME 的变量指明基于外部转换 ET1 基点坐标系的第 1 根转换轴的
位置。
X、Y、Z:原点沿着轴的推移,单位:[mm]
A、B、C:轴角度的旋转,单位:[°]
示例
$ET1_TA1KR={X 0.0,Y 280.0,Z 510.0,A 0.0,B 90.0,C 0.0}
坐标系原点基于外部转换的基点沿 Y 轴方向移动 280 mm、沿 Z 轴方向移动
510 mm 至第一个附加轴的万向节。轴转角 B 转动 90°,使正 Z 方向与第一
根附加轴的旋转轴一致。
$ET1_TFLA3
说明 外部转换 ET1 的 FLANGE 坐标系位置
结构类型 FRAME 的变量指明基于外部转换 ET1 第 3 根转换轴位置的 FLANGE
坐标系位置。
X、Y、Z:原点沿着轴的推移,单位:[mm]
A、B、C:轴角度的旋转,单位:[°]
对于 ROBROOT 运动系统,机器人位于运动系统的法兰上。该变量描述了在该
情况下机器人在运动系统 FLANGE 坐标系中的位移和姿态。
示例 ROBROOT 运动系统
$ET1_TFLA3={X 0.0,Y 0.0,Z 0.0,A 0.0,B -90.0,C 0.0}
外部转换 FLANGE 坐标系的轴转角 B 转动 -90°。机器人以该姿态位于法兰
上。
---------------------上述是库卡的资料------------
做计算前需要在齿轮箱设置好减速比等,前面的步骤网上好多能搜到不赘述。

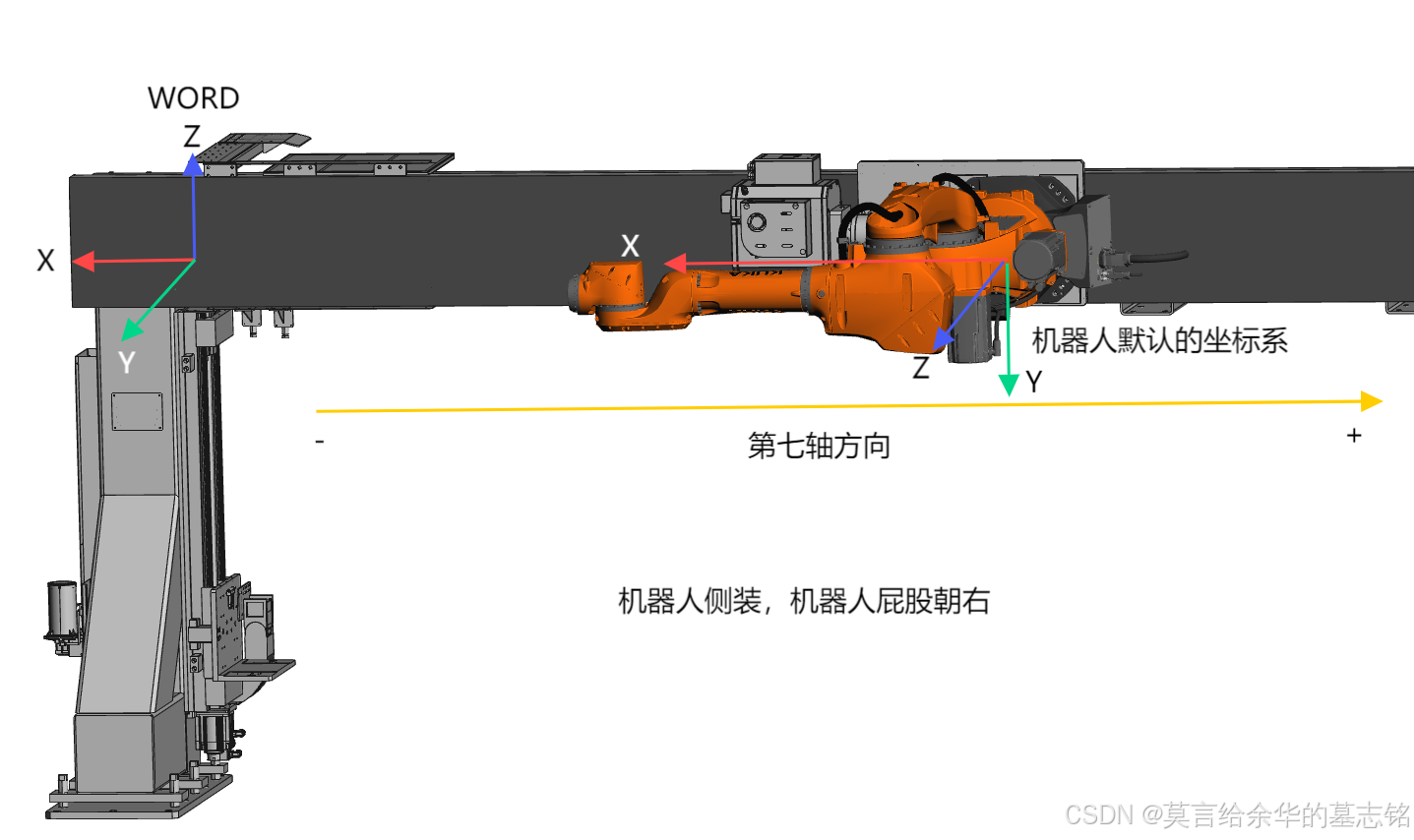
现场设备如图 侧装机器人安装在龙门的滑轨上。
现在主要是如何计算
$ET1_TA1KR、
$ET1_TFLA3:
解释一下,没有经过培训纯靠自己和同事琢磨 我俩土包子一个,不过是验证过的。步骤如下。
1 首先我们要确认一下我们最终我们想要的世界坐标的方向,我这里是Z轴朝天上,X朝左,Y垂直 X超前。
2 我们第七轴正方向是朝右。
3 机器人侧装坐标系 Z正方向朝前,X朝左,Y朝下。
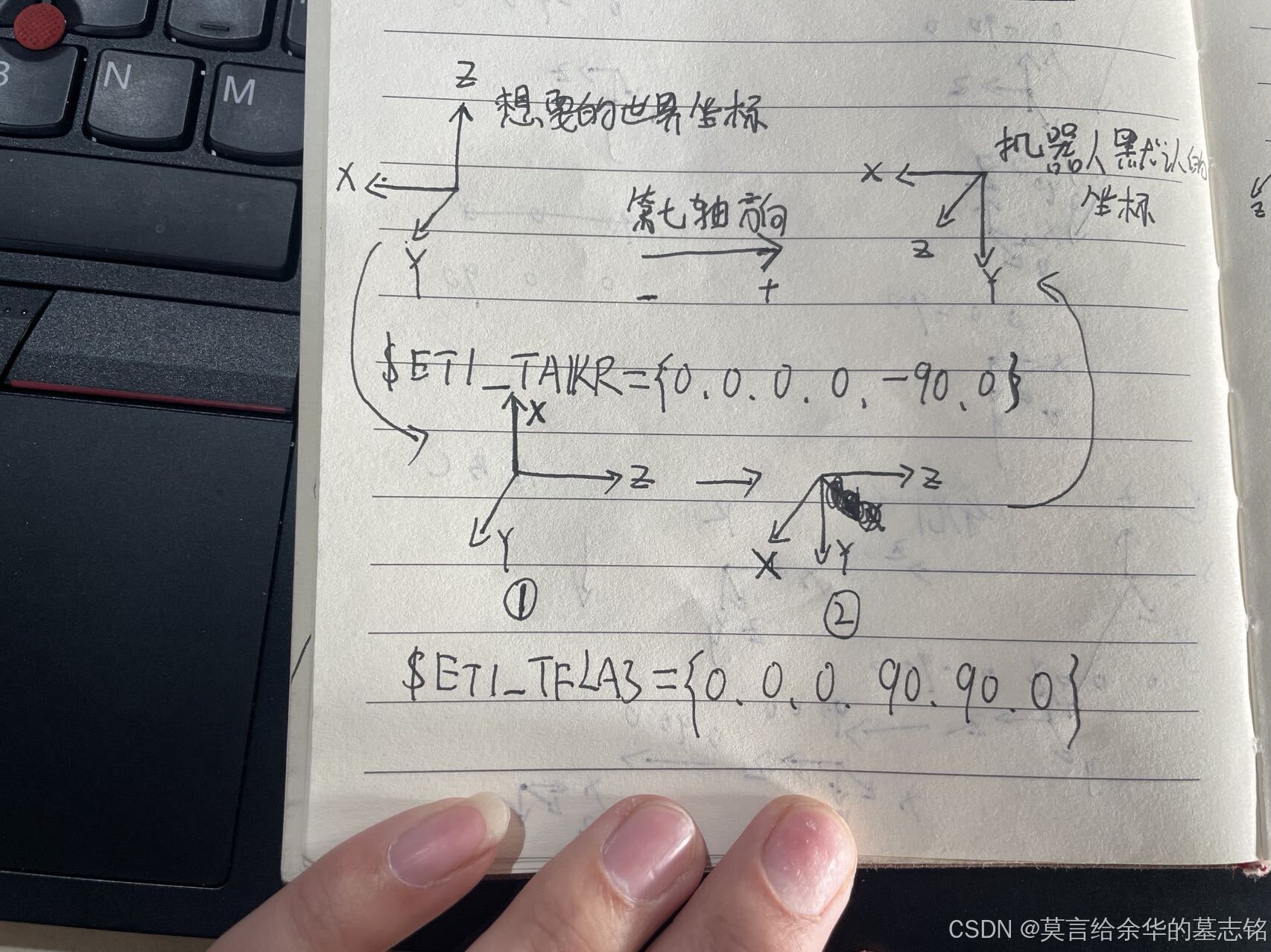
4 先转动想要的世界坐标系,使他的正Z指向第七轴的正方向,这里需要按照 A 、B 、C 的顺序转动。A 是绕Z轴、B是绕Y轴、C是绕X轴,这个时候伸出我们的右手,想转谁就用大拇指握住这根坐标轴四指的方向是正,反之为负。这里握住Y轴转-90°后,世界坐标系的正Z与第七轴的正方向一致。所以
$ET1_TA1KR={0,0,0,0,-90,0}
,当然这里的XYZ三个值可以根据需要调整。
5 经过第四步的转动后坐标系变成笔记本上的①,然后再将该坐标系转动到和机器人默认坐标系方向一致即可。按照A-B-C的顺序先绕A也就是Z转动90°,这个时候变成笔记本上的②,这个时候的坐标系的正Y和机器人默认坐标系就一致了,然后继续绕Y轴转动90°就变成了和机器人坐标系一致了。所以
$ET1_TFLA3=
{0,0,0,90,90,0}
。
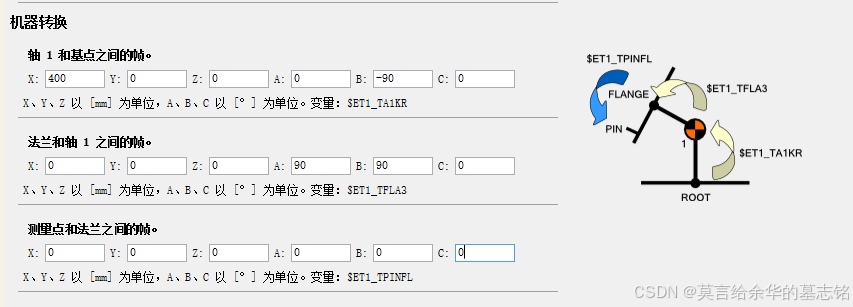
6 把数据填进去
7 下载进库卡机器人,然后在安全配置里更新一下,最后测试在全局坐标系下 分别手动移动X、Y、Z看是不是想要的效果,最后切换到外部轴,手动移动一下E1,看看是不是TCP不移动,如果不移动那十有八九应该是成功了。
仅作为参考,正规的方法我们不太清楚。

















 196
196

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









