






 本文介绍了如何对松下焊接机械手进行TCP调整和原点复位,强调了调整的重要性,详细阐述了从登录TCP数据到完成6点示教的步骤,确保机械臂姿态顺畅和焊接效果提升。
本文介绍了如何对松下焊接机械手进行TCP调整和原点复位,强调了调整的重要性,详细阐述了从登录TCP数据到完成6点示教的步骤,确保机械臂姿态顺畅和焊接效果提升。
大家好,我是头条@电气电子技术,欢迎大家的关注和浏览!
松下焊接机械手是工业生产常见的机械设备。很多维修人员只懂得修正位置或者做个简单的编程,而不会复位机械原点。
复位机械原点,即TCP调整方法,很重要,在面对复杂的焊接轨迹时,原点位置准确,机械人姿态就会顺畅和灵活,而且焊接的效果也比没有原整原点之前好得多。
所以,维修人员或者机械手使用者,要懂得调整!

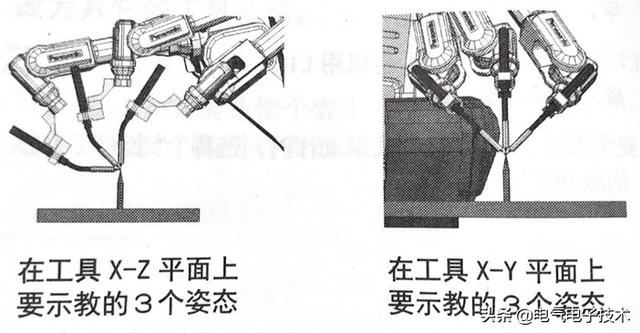
将TCP(Tool Center Point:工具控制点),通过输入特定的示教姿态,计算出工具补偿值,来进行设定的工作。叫做TCP调整。必须在同一个点上示教保存6个工具姿态(工具X-Z平面上3个,工具X-Y平面上3个)。进行TCP调整时,不计算工具安装角度 “TW”的值。因此,应事先正确设定要调整的工具补偿TW的值。
第2点的示教位置应和示教第1点时的基准点(销2针)对准,且TW轴不得发生转动。
如图所示&#x
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4992
4992

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









