







 本文介绍了使用Arduino进行MPU6050六轴传感器的测试与校准过程,强调了Z轴在长时间旋转后可能出现的漂移问题,以及如何通过静置观察数据变化来评估其稳定性。详细步骤包括安装库、接线、下载代码及观察串口助手数据。同时,提到了在不同轴向旋转设备以获取角度数据的方法。
本文介绍了使用Arduino进行MPU6050六轴传感器的测试与校准过程,强调了Z轴在长时间旋转后可能出现的漂移问题,以及如何通过静置观察数据变化来评估其稳定性。详细步骤包括安装库、接线、下载代码及观察串口助手数据。同时,提到了在不同轴向旋转设备以获取角度数据的方法。
1、测试旋转角度,X轴,Y中, Z轴。
Z轴会飘逸,放久了,会飘逸很大,测量不准确。就是水平旋转的时候。特别要在注意,具体原因自己百度。
2、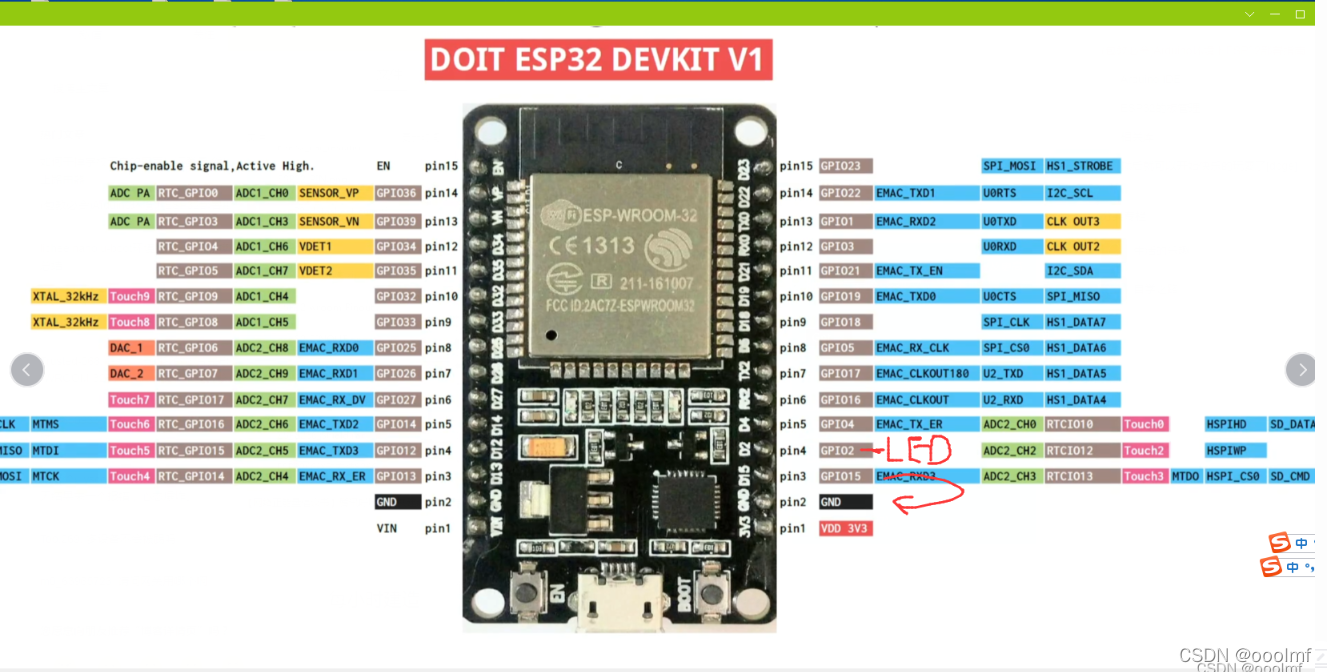
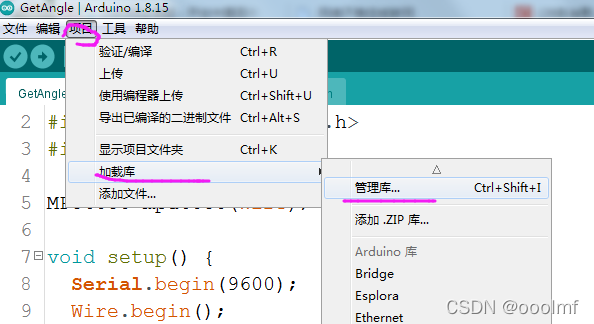
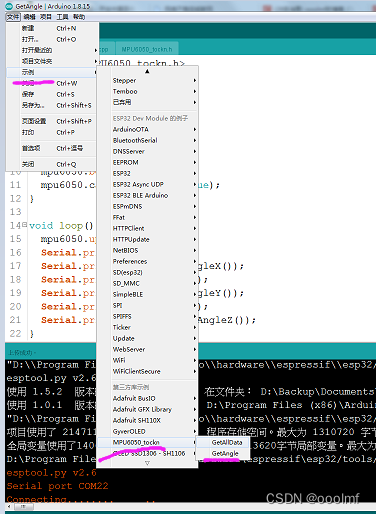
3、下载库。
步骤:
(1)打开arduino。
(2)等待加载结束,大概十多秒吧。
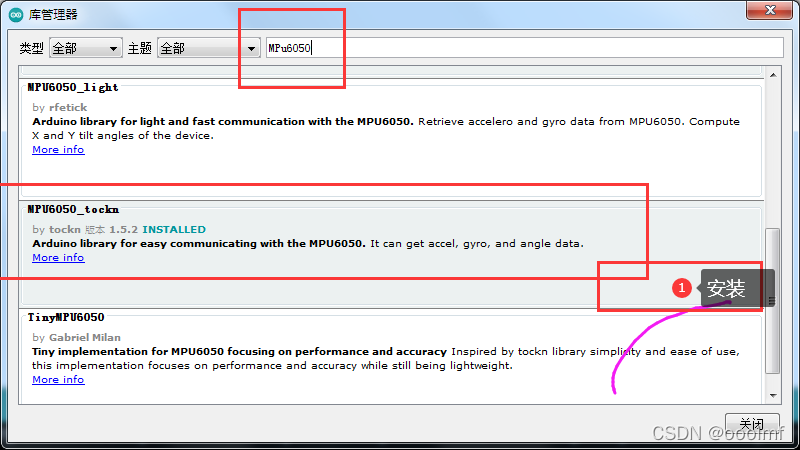
(3)输入MPU6050,搜索库,安装
(4)打开案例代码。编译,下载。
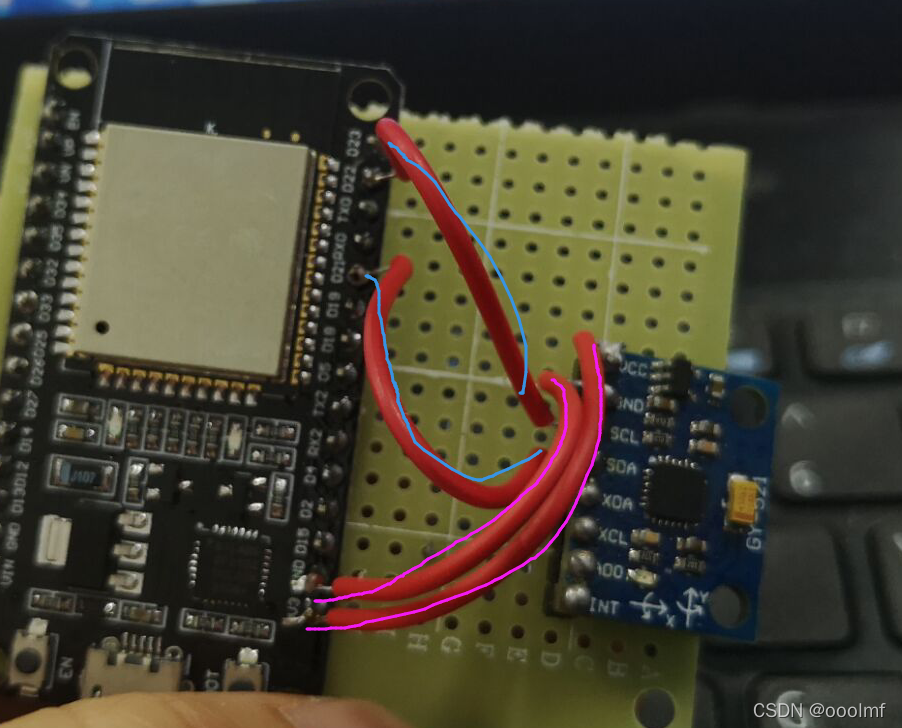
(5)接线
MPU6050模块的VCC接开发板的3.3V。GND接GND,SCL接D22,SDA接D21.
如图。其他6050模块的引脚不接
(6)打开串口助手,设置波特率9600,打开,看下效果。
这里标定需要大概几秒。
按下开发板的EN按键,那么就是重新上电启动了。
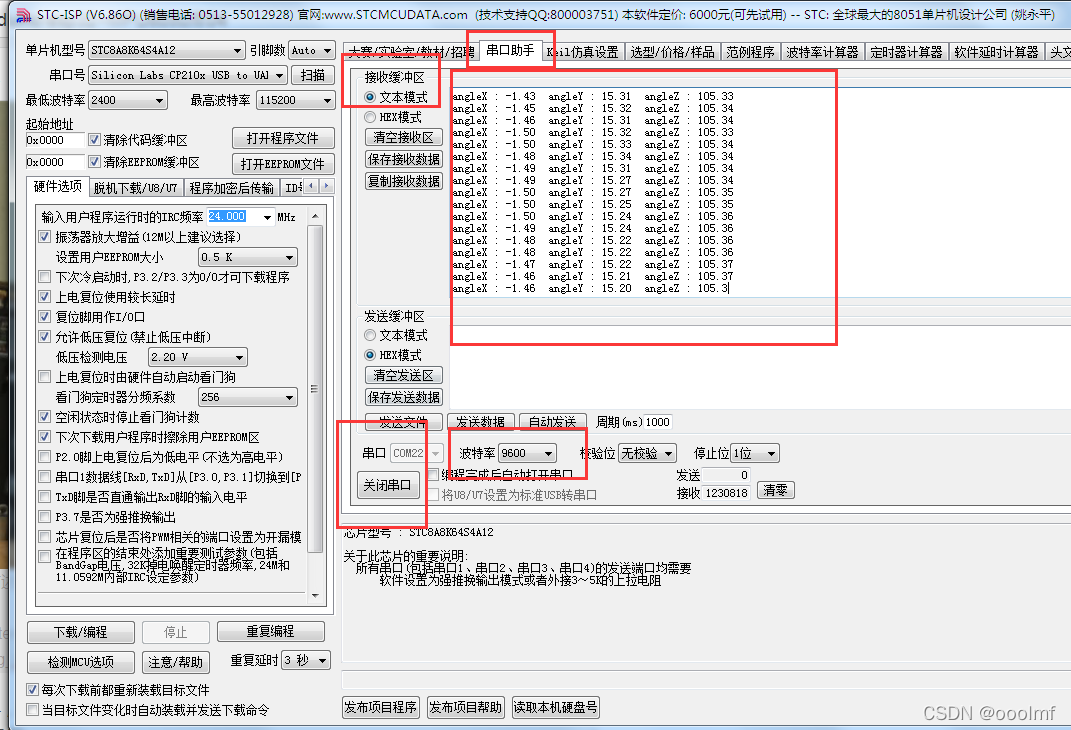
(7)分别绕X,Y,Z轴,看下运动角度。变化、。
记录下角度,数据范围,等。
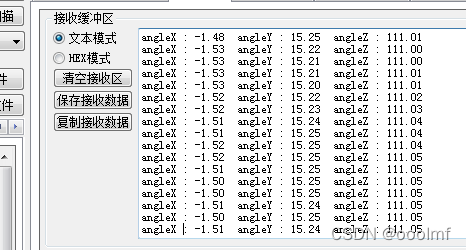
(8)静止放几分钟,看下三个角度是不是会有飘移,数据变化大不大。

















 1052
1052

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









