






chirp group generation
原理推导
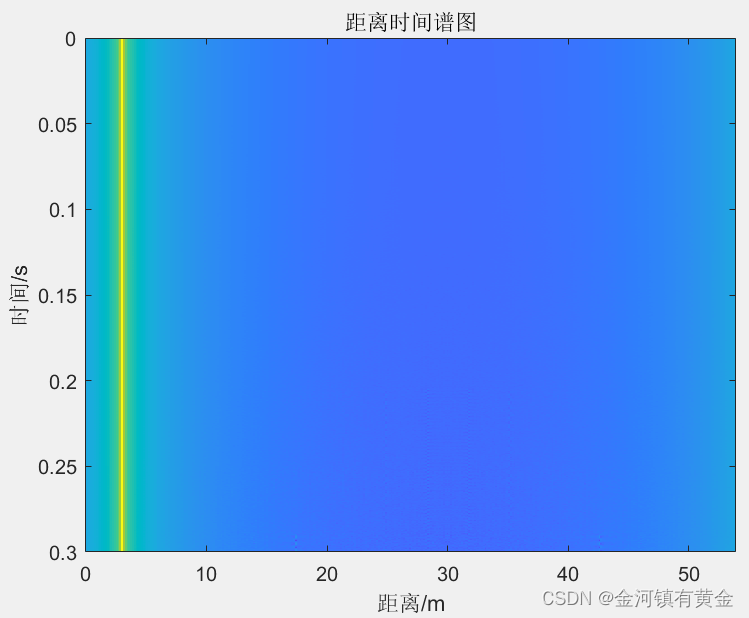
一维FMCW距离FFT。在一段时间内连续对差拍信号采样,然后快时间FFT得到距离-时间谱矩阵。(后面有代码实现。)
可以用reshape,将长时间信号重新排列成矩阵。注意时间td的设置
reshape(xn,[Na,Nr])
S I F ( n T + t ) : = S I F ( n , t ) → 距离门 F F T S ( n ) = A e 4 π f c D ( t ) c S_{IF}(nT+t) := S_{IF}(n,t) \xrightarrow{距离门FFT} S(n) = Ae^{4\pi f_c \frac{D(t)}{c}} SIF(nT+t):=SIF(n,t)距离门FFTS(n)=Ae4πfccD(t)
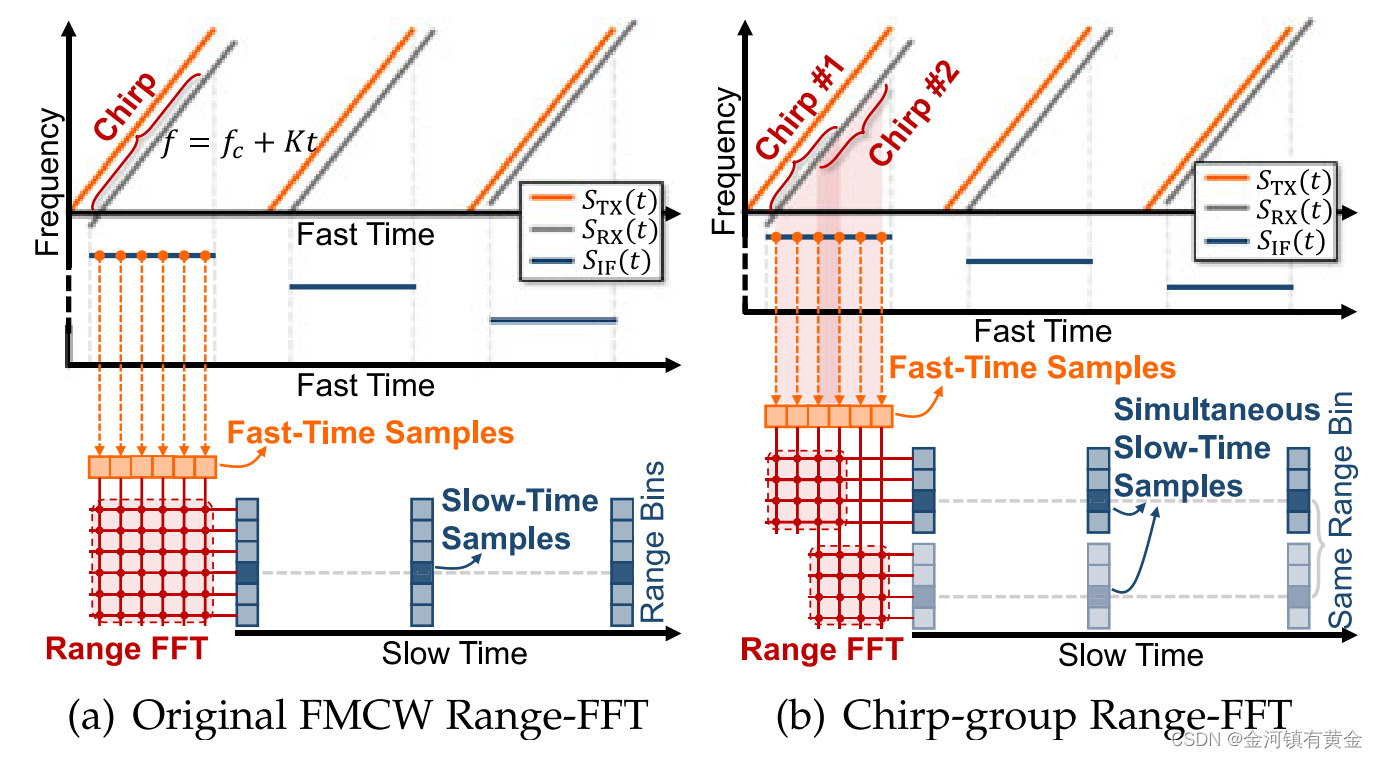
如上图所示,传统的距离向FFT使用所有快时间样本为每个距离门生成一个慢时间样本
如果将快时间样本分成不同的组并在每组中进行距离向 FFT,可以为每个距离门得到多个同步的慢时间样本。
S I F ( n , t ) → 距离门分组 F F T { S [ g ] ( n ) } g ∈ [ 1 , G ] S_{IF}(n,t) \xrightarrow{距离门分组 \quad FFT} \{S^{[g]}(n)\}_{g \in [1,G]} SIF(n,t)距离门分组FFT{S[g](n)}g∈[1,G]
(b)图在6个快速时间样本上使用大小为4的滑动窗口,获得具有2个样本的滑动步长的两个快速时间样本组。这相当于生成具有与原始Chirp不同起始频率两个较短的虚拟chirp。产生的chirp群具有相干性和差异性。发射不同载频的信号可以提高VSNR,提高拟合圆弧的准确性。
G表示chirp数量,
Δ
f
c
\Delta f_c
Δfc表示每次偏移的频率。
Δ
Θ
=
θ
0
[
g
+
1
]
−
θ
0
[
g
]
=
4
π
D
0
c
(
f
)
[
g
+
1
]
)
\Delta \Theta = \theta_0^{[g+1]} - \theta_0^{[g]} = \frac{4 \pi D_0}{c} (f_)^{[g+1]})
ΔΘ=θ0[g+1]−θ0[g]=c4πD0(f)[g+1])
close all;clear
fw = 100; %水下声源频率
P = 110; %点声压
omega = 2*pi*fw; %角频率:/s
rho = 1;
c = 1500; %声波在水介质的传播速度
lamda = c/fw ;
k = 2*pi/lamda; %水面波动的波数:/m
mu = 1;%水介质粘度:Pa s
g = 9.8;%重力加速度:N/kg
sigma = 72.75e-3;%表面张力系数:N/m
alpha = 4*mu*k^2*sqrt(k*g+sigma*k^3/rho)/(rho*g+3*sigma*k^2/rho);
ymax = 2*P/omega/rho/c;
%----------------------FMCW测距---------------------------
h = 3;%雷达水上高度
fc = 77e9;%雷达中心频率
c0 = 3e8; %光速
lamda_r = c0/fc;
Br = 1e9;%雷达带宽
Tp= 3e-5; %chirp持续时间 %需要相位积累
Kr = Br/Tp;
fs = 1.2e7;
N = round(Tp*fs);
xx = 0; %声源处声致水面波振动
Refh = h;
Na = 10000;
t = linspace(0, Tp , N);
r = (0:N-1)/Br*c0/2;
yt = ymax * exp(-alpha * xx) * cos(k*xx - omega*t);
td = 2*(h+yt)/c0;
M_fft = zeros(Na,N);
for i = 1:Na
tm = t + (i-1)*Tp;
Tx= exp(1j *2*pi*fc *tm + 1j*pi* Kr* tm.^2 ) ;
Rx = exp(1j *2*pi*fc *(tm-td) + 1j*pi* Kr*(tm-td).^2 ) ;
Mix = Tx .* conj(Rx);
M_fft(i,:)= fft(Mix, N);
end
figure; imagesc(r,linspace(0,Na*Tp,Na),db(abs(M_fft)));
ylabel('时间/s');xlabel('距离/m');title('距离时间谱图');
% figure;heatmap(abs(M_fft));
差拍信号做FFT
也可以用reshape,将长时间信号重新排列成矩阵
reshape(xn,[Na,Nr])
注意时间td的设置
close all;clear
fw = 100; %水下声源频率
P = 110; %点声压
omega = 2*pi*fw; %角频率:/s
rho = 1;
c = 1500; %声波在水介质的传播速度
lamda = c/fw ;
k = 2*pi/lamda; %水面波动的波数:/m
mu = 1;%水介质粘度:Pa s
g = 9.8;%重力加速度:N/kg
sigma = 72.75e-3;%表面张力系数:N/m
alpha = 4*mu*k^2*sqrt(k*g+sigma*k^3/rho)/(rho*g+3*sigma*k^2/rho);
ymax = 2*P/omega/rho/c;
%----------------------FMCW测距---------------------------
h = 3;%雷达水上高度
fc = 77e9;%雷达中心频率
c0 = 3e8; %光速
lamda_r = c0/fc;
Br = 1e9;%雷达带宽
Tp= 3e-5; %chirp持续时间 %需要相位积累
Kr = Br/Tp;
fs = 1.2e7;
N = round(Tp*fs);
xx = 0; %声源处声致水面波振动
Refh = h;
Na = 10000;
t = linspace(0, Tp , N);
r = (0:N-1)/Br*c0/2;
yt = ymax * exp(-alpha * xx) * cos(k*xx - omega*t);
td = 2*(h+yt)/c0;
M_fft = zeros(Na,N);
for i = 1:Na
tm = t + (i-1)*Tp;
Tx= exp(1j *2*pi*fc *tm + 1j*pi* Kr* tm.^2 ) ;
Rx = exp(1j *2*pi*fc *(tm-td) + 1j*pi* Kr*(tm-td).^2 ) ;
Mix = Tx .* conj(Rx);
M_fft(i,:)= fft(Mix, N);
end
figure; imagesc(r,linspace(0,Na*Tp,Na),db(abs(M_fft)));
ylabel('时间/s');xlabel('距离/m');title('距离时间谱图');
% figure;heatmap(abs(M_fft));















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









