






四轮转向系统横摆角速度控制simulink仿真模型,利用滑模控制算法,基于八自由度车辆模型,控制有比较好的效果,附参考说明。
YID:29150640269337950
ccboy123

四轮转向系统横摆角速度控制是一项关键技术,它在车辆行驶过程中起到了至关重要的作用。随着汽车行业的快速发展,越来越多的车辆开始采用四轮转向系统,以提高行驶的稳定性和灵活性。本文将使用Simulink仿真模型,并结合滑模控制算法来对四轮转向系统的横摆角速度进行控制,以达到更好的效果。
首先,我们需要了解八自由度车辆模型。八自由度车辆模型是一种常用的车辆动力学模型,它考虑了车辆的长、宽、高等尺寸和质量分布等因素,可以更准确地描述车辆的运动行为。在该模型中,车辆被看作是一个具有八个自由度的刚体,包括三个平动自由度和五个转动自由度。
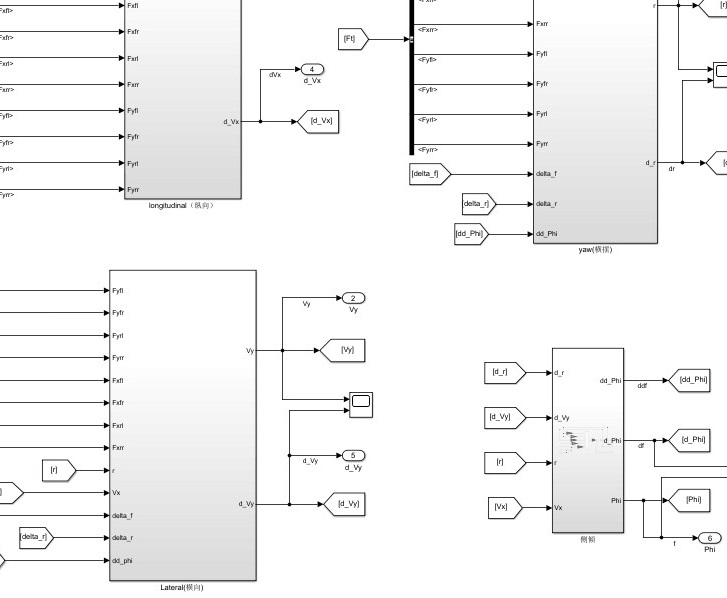
接下来,我们将使用Simulink来建立四轮转向系统横摆角速度控制的仿真模型。Simulink是一款功能强大的工程仿真软件,它可以快速、准确地建立各种控制系统的模型,并进行仿真分析。我们可以通过Simulink中的各种组件和模块来搭建四轮转向系统的仿真模型,如引擎模块、转向模块、传动系统模块等。
在仿真模型中,我们将采用滑模控制算法来对横摆角速度进行控制。滑模控制是一种常用的非线性控制方法,它通过引入一个滑模面来实现对系统状态的快速调节。在四轮转向系统中,我们可以根据车辆的当前状态和目标状态来设计滑模控制器的参数,以实现对横摆角速度的精确控制。
通过Simulink仿真模型,我们可以对四轮转向系统横摆角速度控制进行多次仿真实验,以评估控制效果的优劣。在仿真过程中,我们可以调整滑模控制器的参数和其他相关参数,观察系统的响应情况。通过对比实验结果和参考说明,我们可以判断滑模控制算法在四轮转向系统横摆角速度控制中的效果是否达到了预期目标。
综上所述,利用Simulink仿真模型和滑模控制算法来实现对四轮转向系统横摆角速度的控制是一种可行的方法。通过对八自由度车辆模型的建立和仿真分析,可以更好地理解四轮转向系统的运动行为。同时,通过对滑模控制器参数的调节和仿真实验的对比分析,可以得出最佳的控制方法和参数配置。这将为四轮转向系统的横摆角速度控制提供有益的参考和指导。
参考说明:我们将提供详细的参考说明,包括滑模控制器的设计原理、八自由度车辆模型的参数设置等。通过参考说明,读者可以更加深入地了解四轮转向系统横摆角速度控制的实现方法和相关技术细节。同时,参考说明中还包含了一些仿真结果和分析,以便读者对控制效果有更清晰的认识。
通过本文的研究,读者可以对四轮转向系统横摆角速度控制有更深入的理解,并掌握Simulink仿真模型和滑模控制算法的应用技巧。同时,读者也可以借鉴参考说明中的参数设置和仿真结果,以便在实际应用中更好地进行系统调节和优化。本文的研究成果将为汽车行业的技术发展和应用提供有益的参考和指导。
相关的代码,程序地址如下:http://imgcs.cn/640269337950.html
















 416
416











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









