






- 右手定则

- 坐标系定义
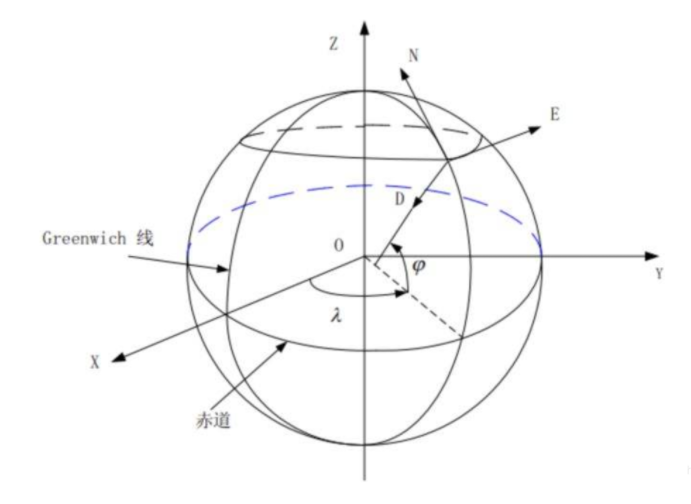
NED坐标系,x轴向前(N),y轴向右(E),Z轴向下(D),陀螺旋转方向基于右手定则

- 加速度计方向判断
已经知道的是重力加速度是一个矢量,其大小约为9.8m/s^2,方向指向地心,当加速度计的敏感轴与重力方向相反时,即可以认为是将加速度计水平静置,正面朝上时,如图,加速度计输出为9.8。


NED坐标系,x轴向前(N),y轴向右(E),Z轴向下(D),陀螺旋转方向基于右手定则
已经知道的是重力加速度是一个矢量,其大小约为9.8m/s^2,方向指向地心,当加速度计的敏感轴与重力方向相反时,即可以认为是将加速度计水平静置,正面朝上时,如图,加速度计输出为9.8。
 1164
1164











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言























