






机械臂自由度
一个在三维空间中的刚体的总自由度是:3(平移自由度)+3(旋转自由度)=6
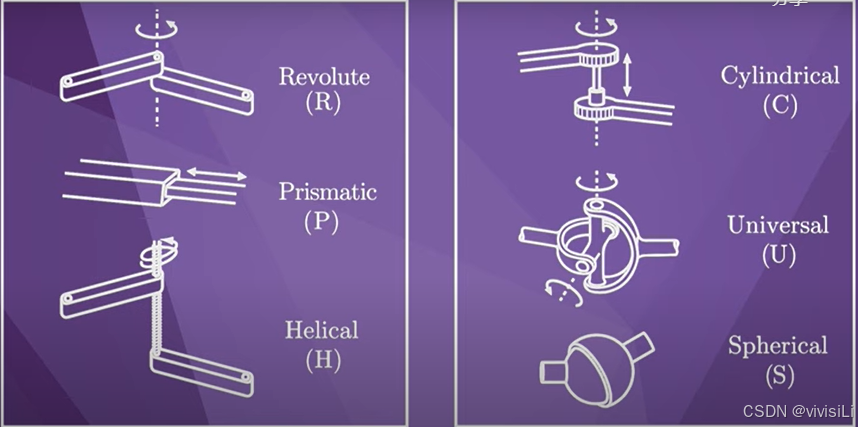
运动副
机器人连杆之间的相互连接引入了约束。在机构学上将这种约束称为运动副。运动副是指两个构件既保持接触又有相对运动的活动连接。
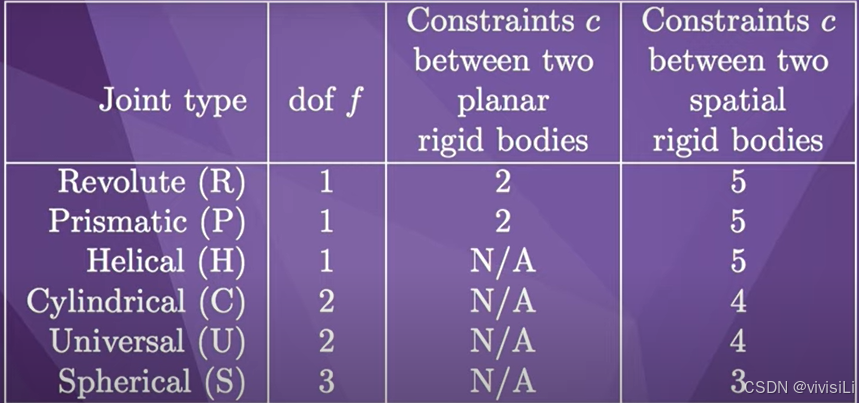
移动副
是一种使两个构件发生相对移动的连接结构,它具有一个移动自由度,约束了刚体其他5个运动。(只能沿某一个轴平移,缺少三个旋转自由度和两个平移自由度);
Base 是机器人坐标系的起点,通常是机器人所在的固定框架或支持平台的参考点。它是整个机器人系统的原点或参考点,一般与地面或某个固定物体相连。
end effector末端执行器
拓扑空间配置
在机器人学中的实际应用主要与工作空间、配置空间以及路径规划等密切相关。通过考虑拓扑结构,机器人能够更好地理解和规划在不同空间中的运动,避免障碍,确保路径的可行性和优化。拓扑学的概念有助于描述和分析机器人在复杂环境中的运动和任务执行,尤其是在需要高度自动化和精密控制的场景下。
速度配置(Velocity Configuration):
则描述机器人各自由度的运动速率。具体来说,速度配置是每个关节的速度向量(如关节的角速度或线速度),即描述机器人从当前配置向下一个配置转变的速率。这通常用于动态控制和轨迹规划中,尤其是涉及机器人的运动规划和速度控制时。
任务空间(Task Space)和工作空间(Workspace)
工作空间是指机器人末端执行器(通常是机械臂的末端工具)能够到达的所有位置的集合。它表示机器人在其运动范围内能触及的物理空间。这个空间的大小和形状通常由机器人本身的结构(如关节的自由度和长度)以及物理限制决定。
任务空间是机器人执行特定任务时所涉及的空间范围。与工作空间不同,任务空间不仅仅考虑末端执行器的位置,还与任务的目标和要求相关。任务空间通常是一个目标空间,描述了机器人在完成特定任务时必须达到的各种位置、姿态或状态。且通常是任务的目标空间。

















 3087
3087

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









