






线控转向Carsim和Simulink联合仿真模型,带Carsim数据库,C级车。
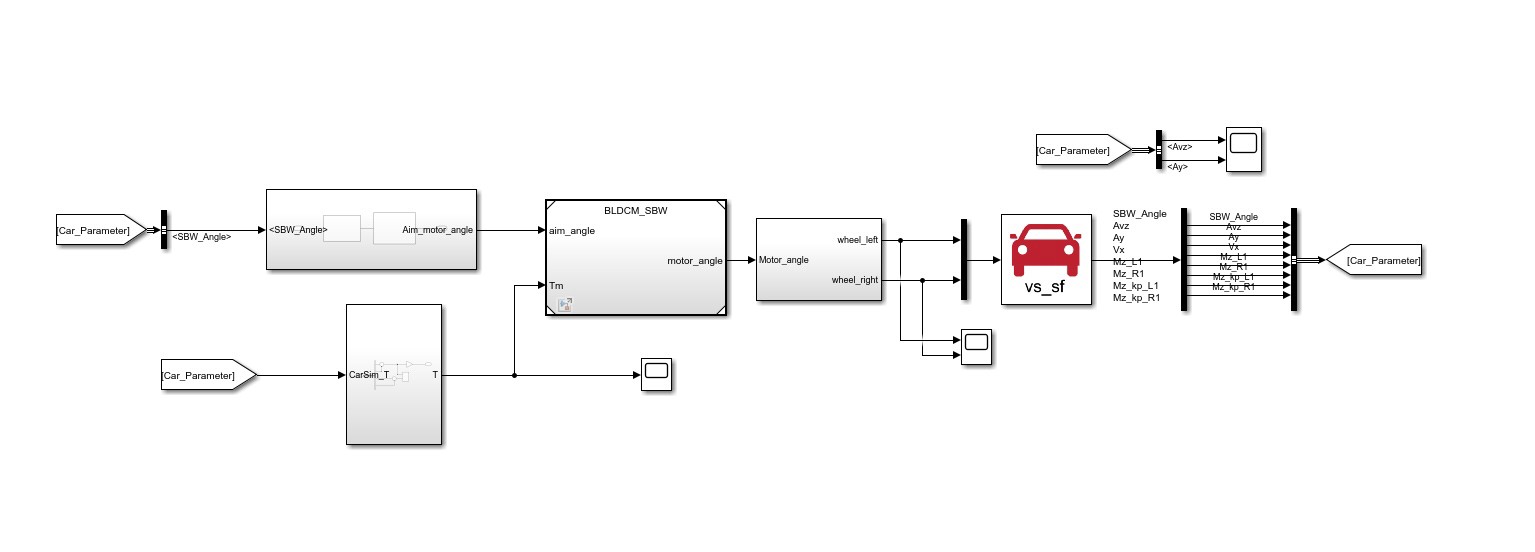
【正向建模,利用三环PID控制算法控制无刷直流电机获得前轮转角】
主要根据Carsim自带的转向,查出小齿轮和转向角之间的关系,利用查表法反推目标转角,而后通过无刷直流电机模型跟踪目标转角。
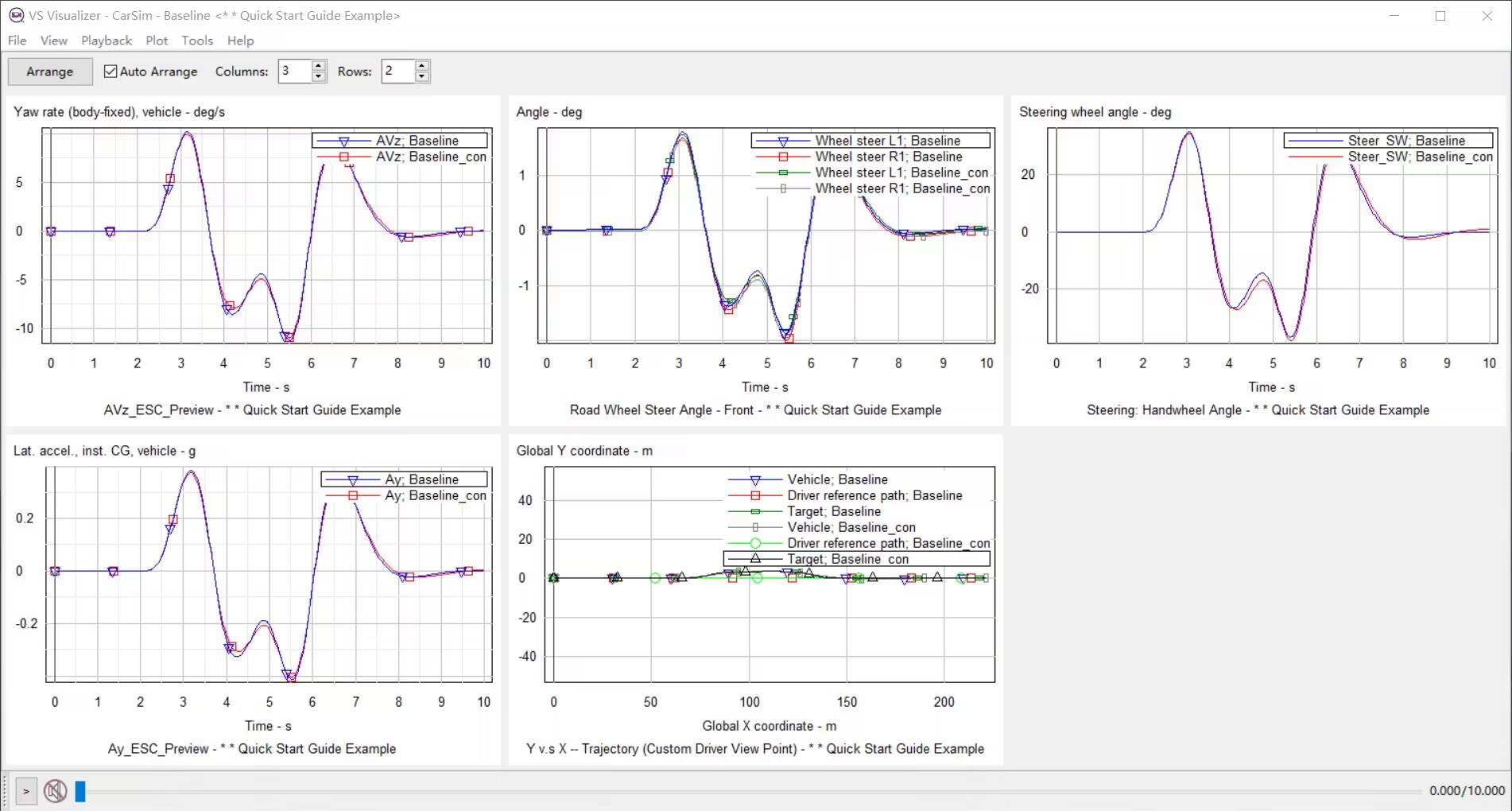
图示为:
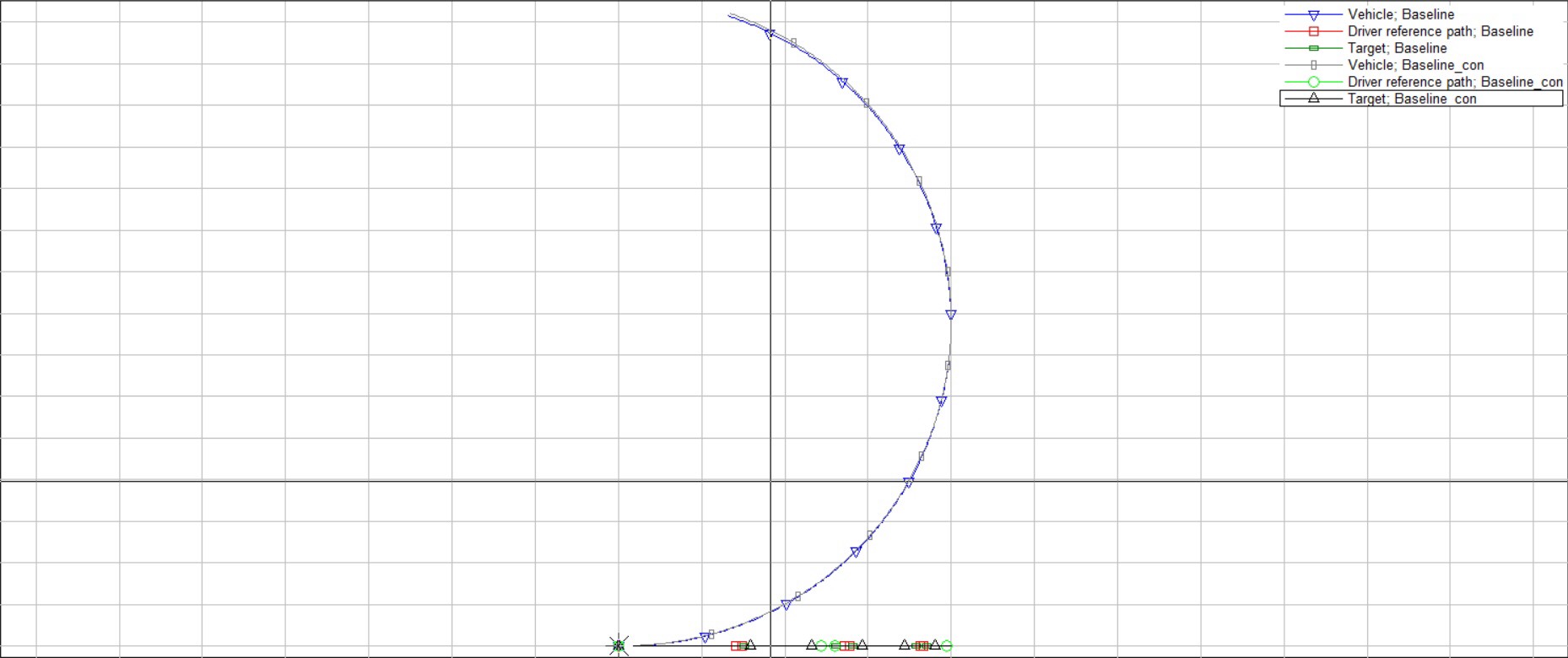
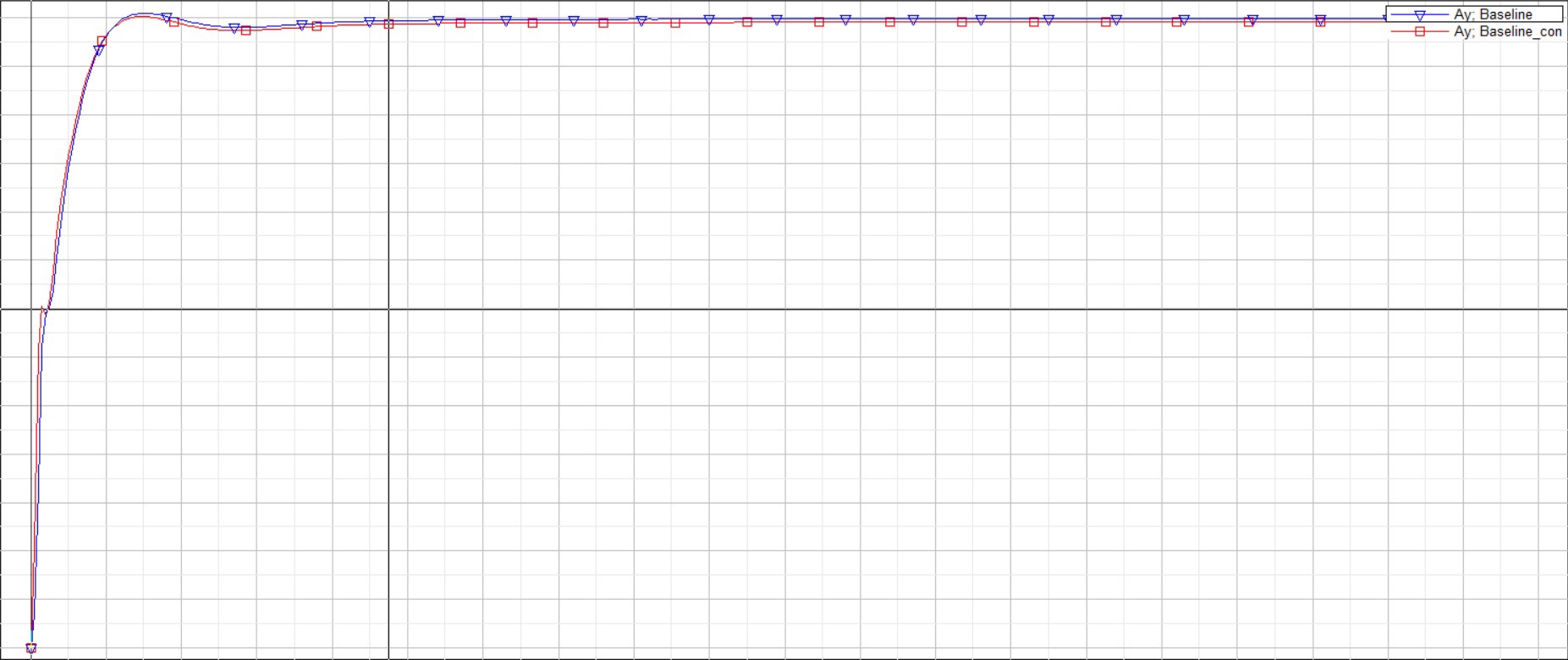
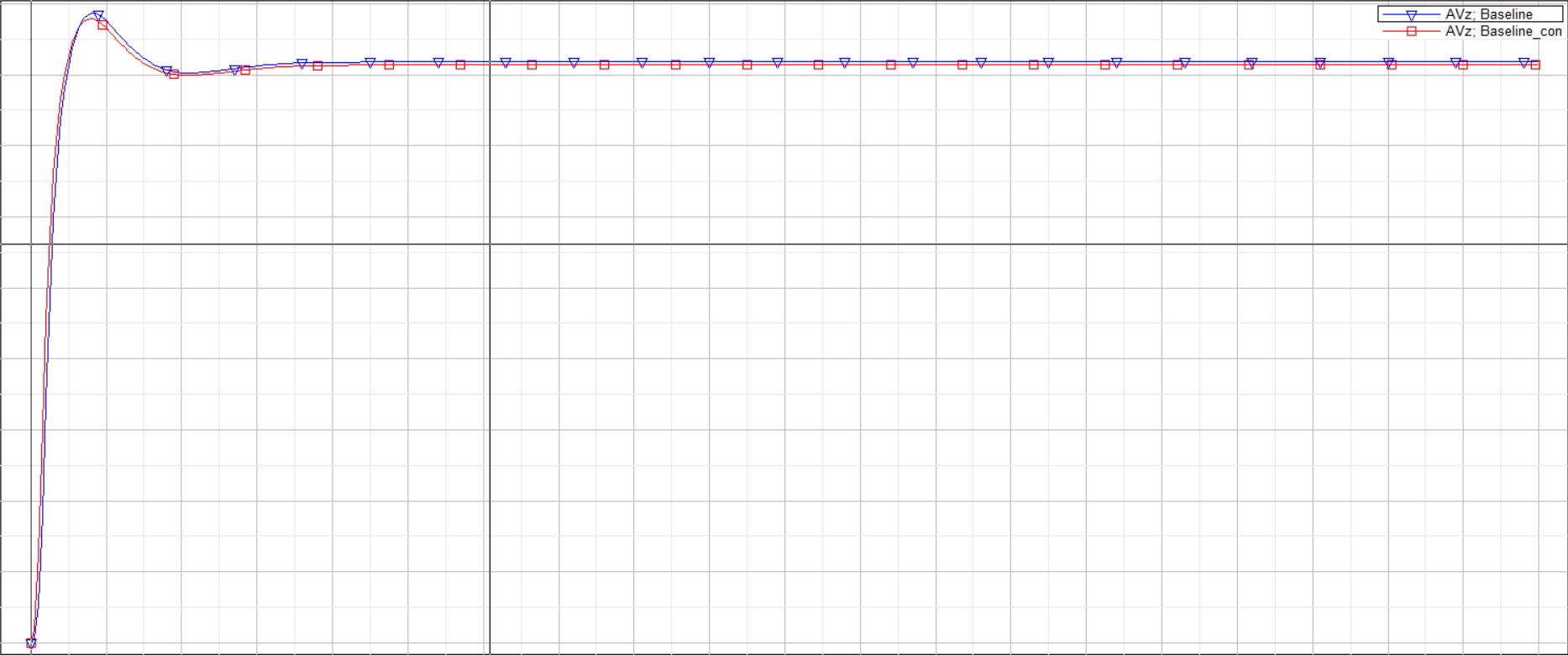
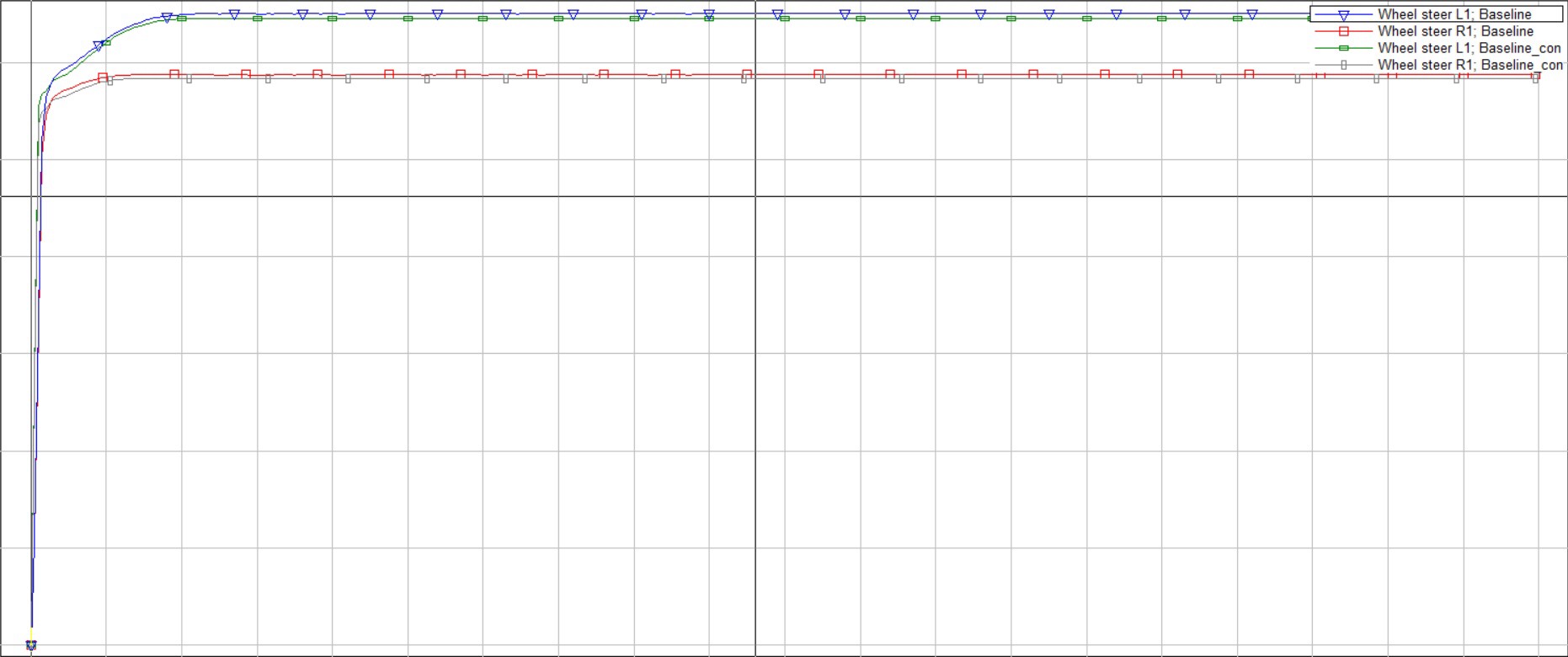
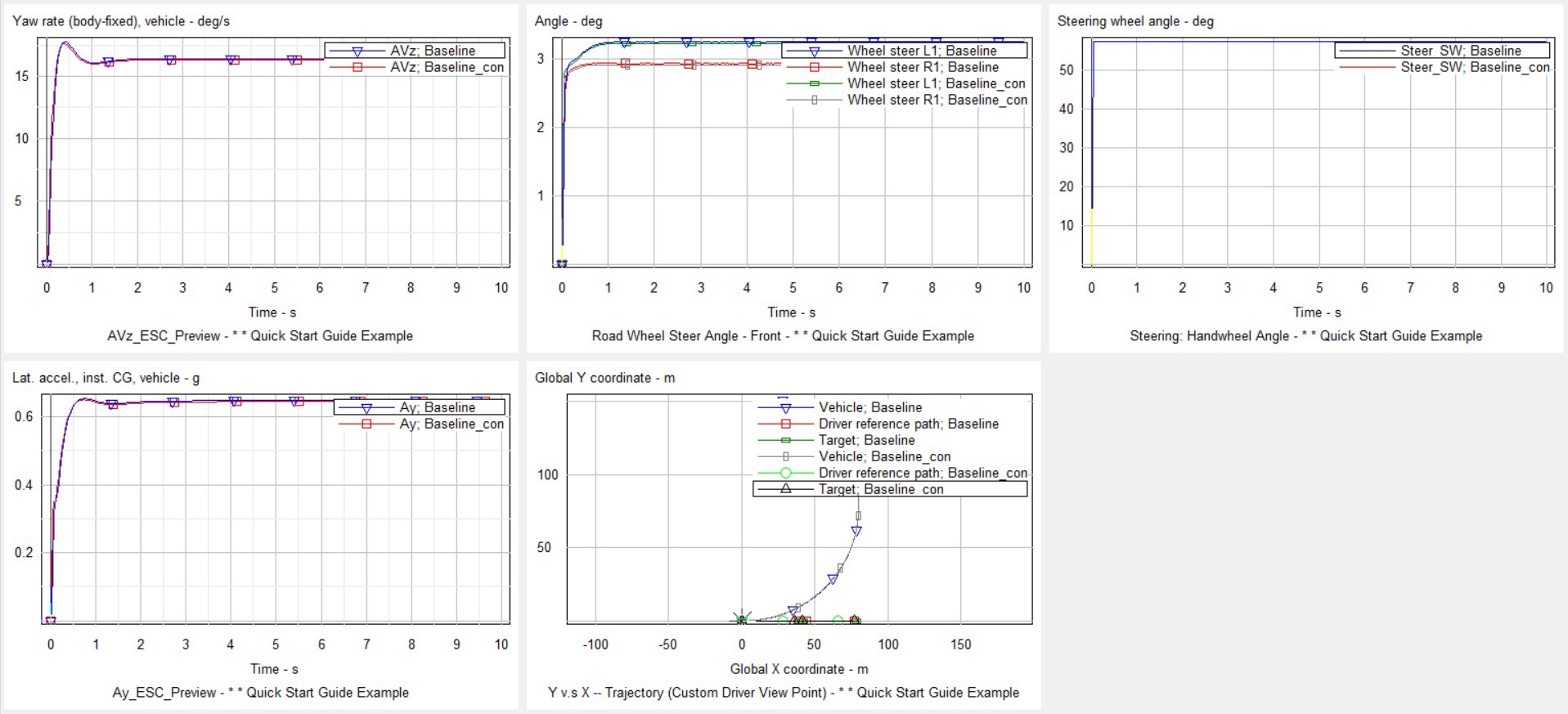
角阶跃工况下,仿真模型前轮转角、横摆角速度、侧向加速度、轨迹图。
最后一张图是 双移线 工况的响应曲线,拐角处响应跟对比的相比有差异。
不过不影响使用。
该卖品中包括 2019版 跟模型对应的Carsim数据库。
注:
模型中主要的内容为电机模型,其他是根据查表得出。
YID:5480701787074500
醉里挑灯看客
线控转向:Carsim与Simulink联合仿真模型探究
在汽车工业中,线控转向作为智能驾驶的关键技术之一,正受到越来越多的关注。本文将从正向建模的角度,探讨如何利用三环PID控制算法控制无刷直流电机,以获得前轮转角,并结合Carsim和Simulink进行联合仿真。
一、背景介绍
在汽车动力学仿真中,Carsim以其丰富的车辆模型和数据库资源,为研究者提供了极大的便利。当我们面对C级车的线控转向仿真时,如何准确模拟并控制前轮转角成为了一个关键问题。本文将通过实例展示如何利用三环PID控制算法和无刷直流电机模型实现这一目标。
二、查表法与电机模型
- 小齿轮与转向角的关系:在Carsim自带的转向中,我们首先需要查出小齿轮和转向角之间的关系。这一关系通常存储在数据库中,我们可以根据输入的转向指令,通过查表法迅速反推出目标转角。
- 无刷直流电机模型:无刷直流电机模型则是我们控制转角的执行器。在Simulink中,我们可以构建这样一个电机模型,通过PID控制算法,使其能够跟踪目标转角。
三、三环PID控制算法
三环PID控制算法是本文的核心之一。它通过比例(P)、积分(I)和微分(D)三个环节的调整,实现对无刷直流电机的精确控制。在转向过程中,该算法能够根据实时反馈的转角信息,调整电机的输出扭矩,从而精确地控制前轮转角。
四、仿真结果与分析
在仿真环境中,我们模拟了角阶跃工况下的前轮转角、横摆角速度、侧向加速度以及轨迹图。从图中可以看出,我们的仿真模型能够快速响应转向指令,并保持稳定的转向性能。在双移线工况的响应曲线中,虽然拐角处的响应与对比模型存在一定差异,但这并不影响我们的模型在实际应用中的效果。
五、结论与展望
本文通过Carsim和Simulink的联合仿真,成功实现了线控转向的正向建模。通过三环PID控制算法和无刷直流电机模型的结合,我们能够精确地控制前轮转角。虽然在实际应用中可能存在一些细微的差异,但这正是我们进一步优化和改进的方向。未来,随着智能驾驶技术的不断发展,线控转向将扮演更加重要的角色,我们期待通过更多的研究和探索,为汽车工业的发展做出更大的贡献。
示例代码(Python伪代码):
# 初始化PID控制器和电机模型
pid_controller = InitializePIDController()
dc_motor = InitializeDCMotor()
# 从Carsim数据库中获取转向关系表
steering_relation_table = LoadCarsimDatabase()
# 模拟转向过程
for turn_command in turn_commands:
# 通过查表法反推目标转角
target_angle = steering_relation_table[turn_command]
# 使用PID控制器调整电机输出,以跟踪目标转角
motor_output = pid_controller.adjust(target_angle, current_angle)
# 控制电机执行转向动作
dc_motor.control(motor_output)
# 记录仿真数据,如前轮转角、横摆角速度等
record_simulation_data()
以上就是本文对线控转向Carsim和Simulink联合仿真模型的探究。通过正向建模和三环PID控制算法的结合,我们能够更好地理解和控制线控转向的性能。随着智能驾驶技术的不断发展,我们有理由相信,未来的汽车将更加智能、安全、舒适。
全面分析,已备: 线控转向Carsim和Simulink联合仿真模型,带Carsim数据库,C级车。 【正向建模,利用三环PID控制算法控制无刷直流电机获得前轮转角】 主要根据
















 909
909

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









