






线控转向系统Carsim和Simulink联合仿真模型,带Carsim数据库,C级车。
【正向建模,利用三环PID控制算法控制无刷直流电机获得前轮转角】
主要根据Carsim自带的转向系统,查出小齿轮和转向角之间的关系,利用查表法反推目标转角,而后通过无刷直流电机模型跟踪目标转角。
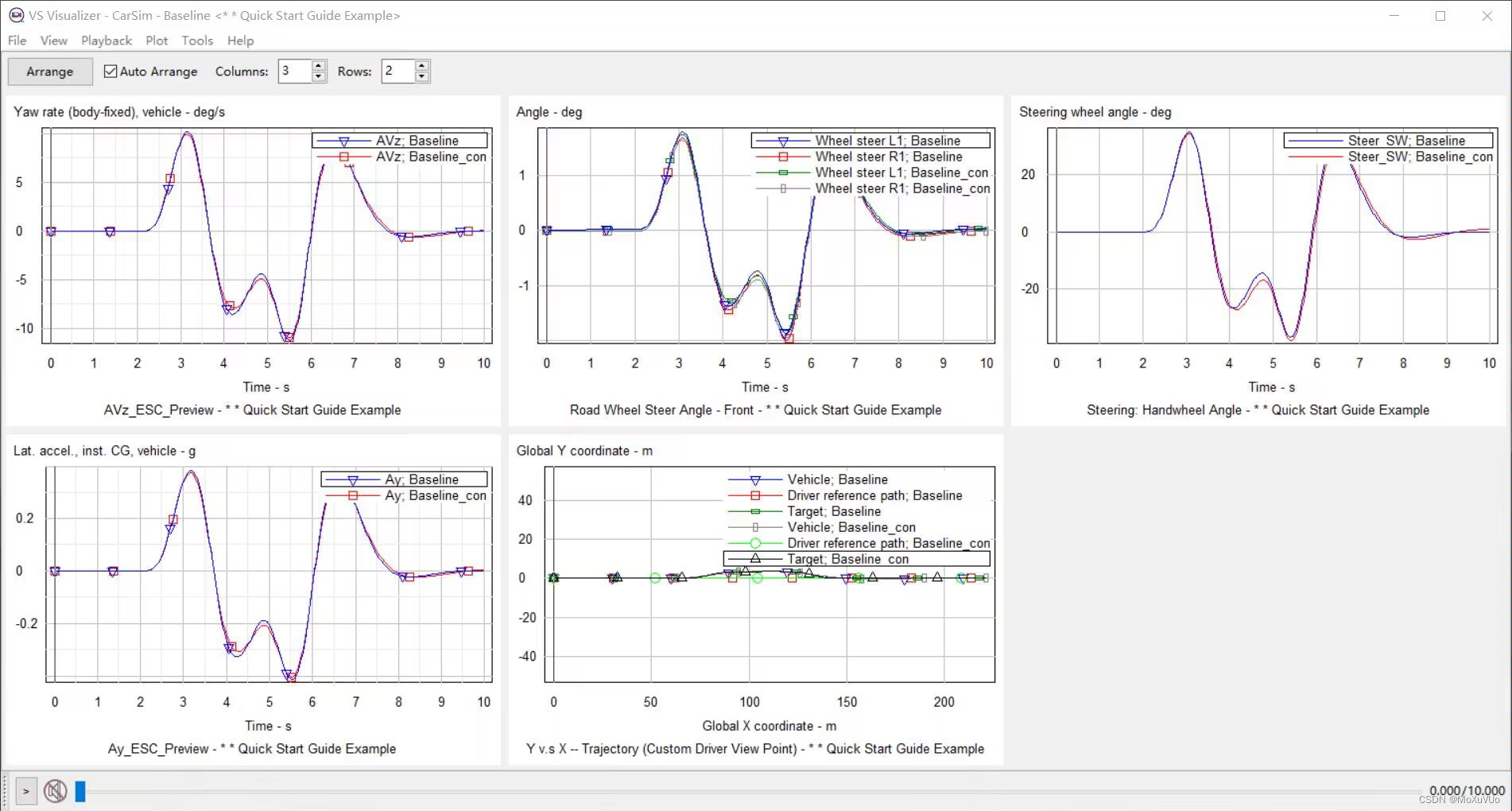
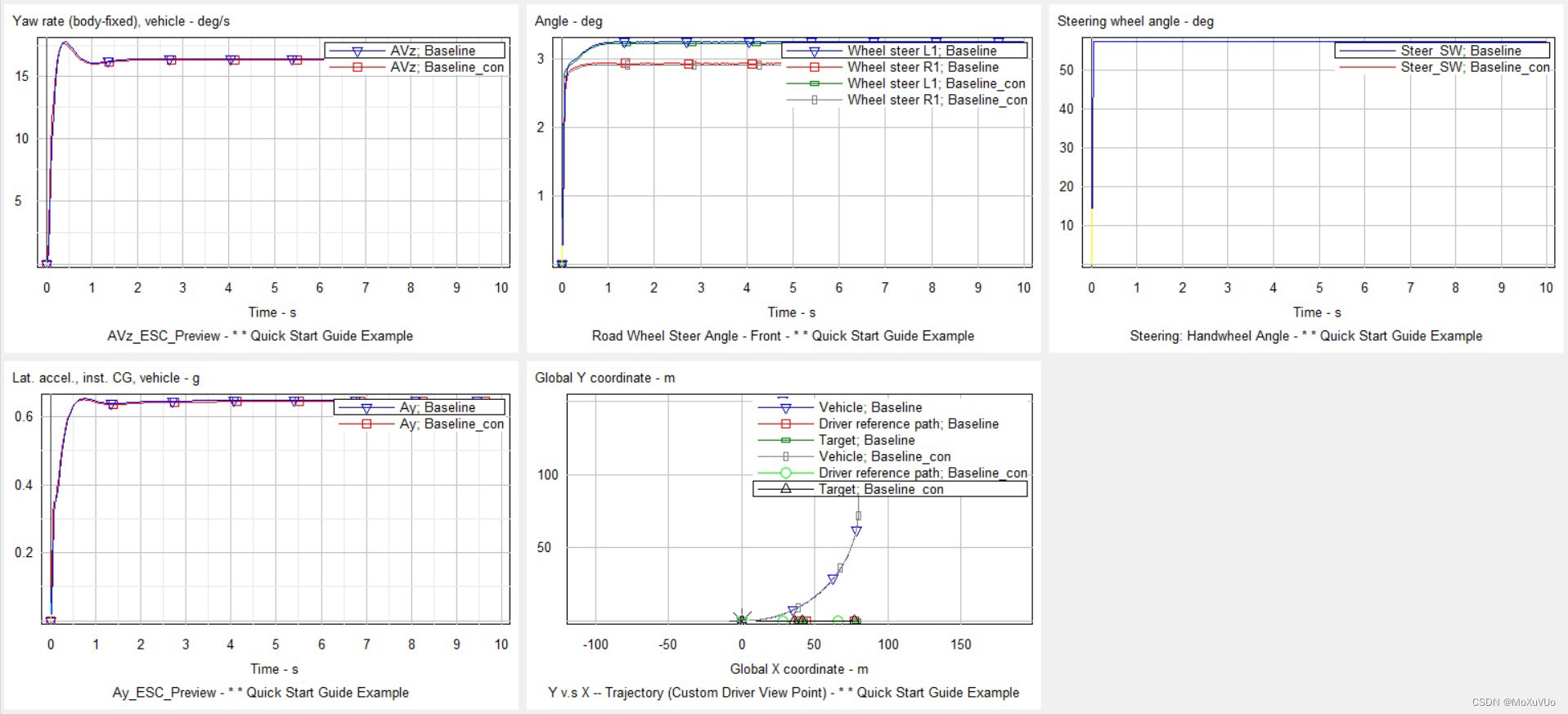
图示为:
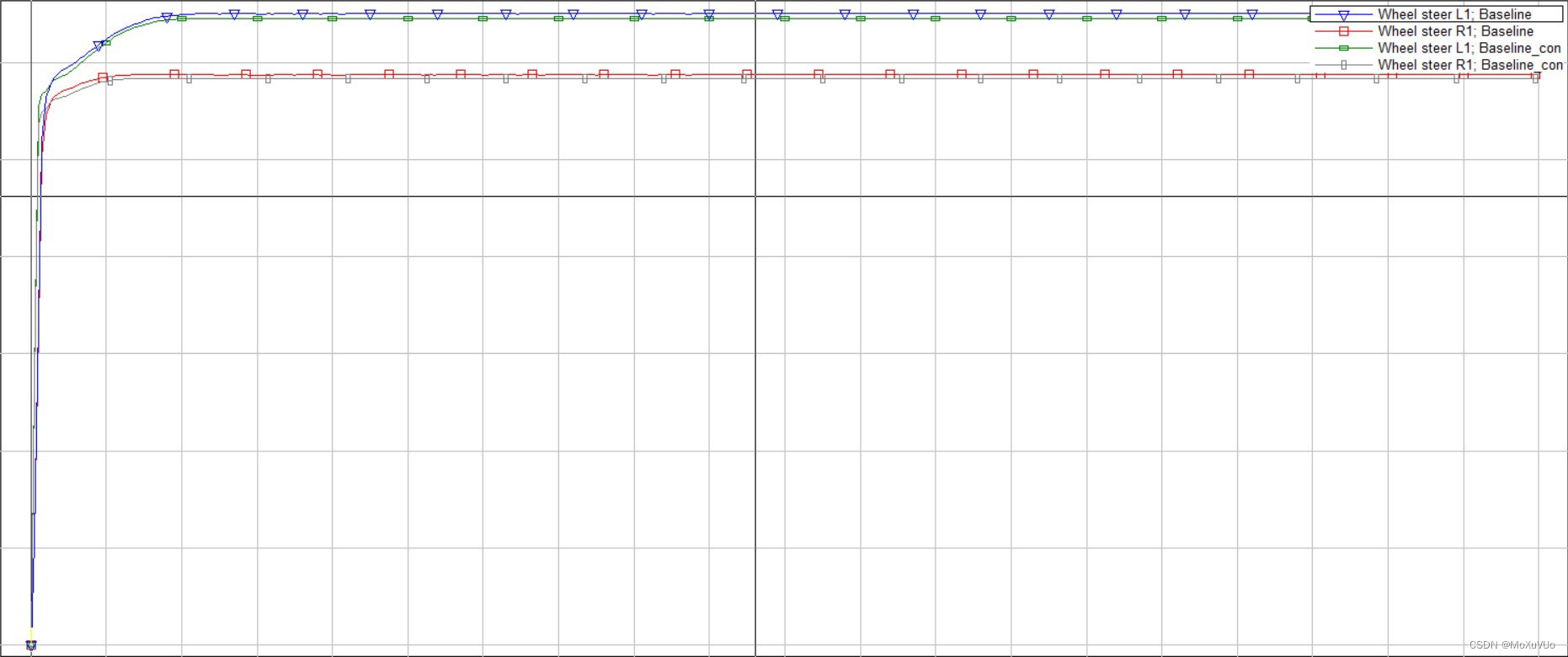
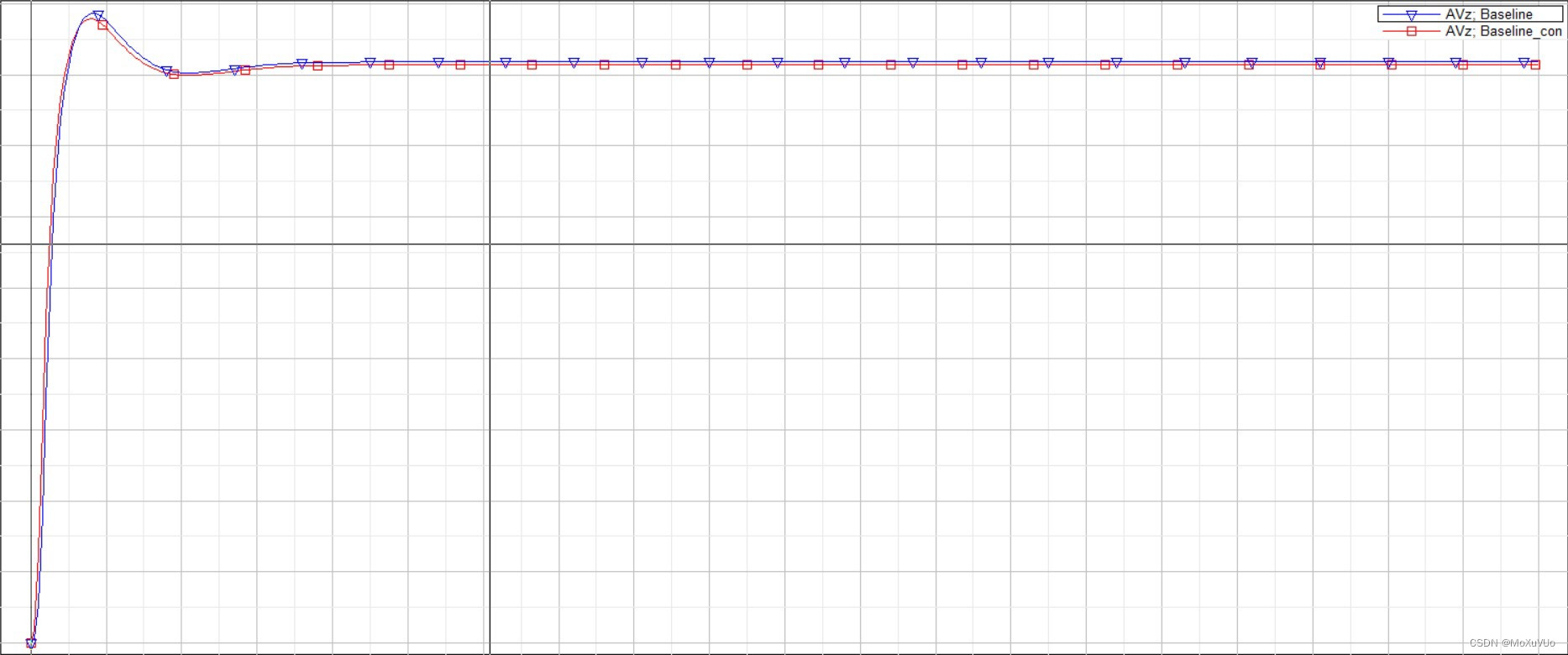
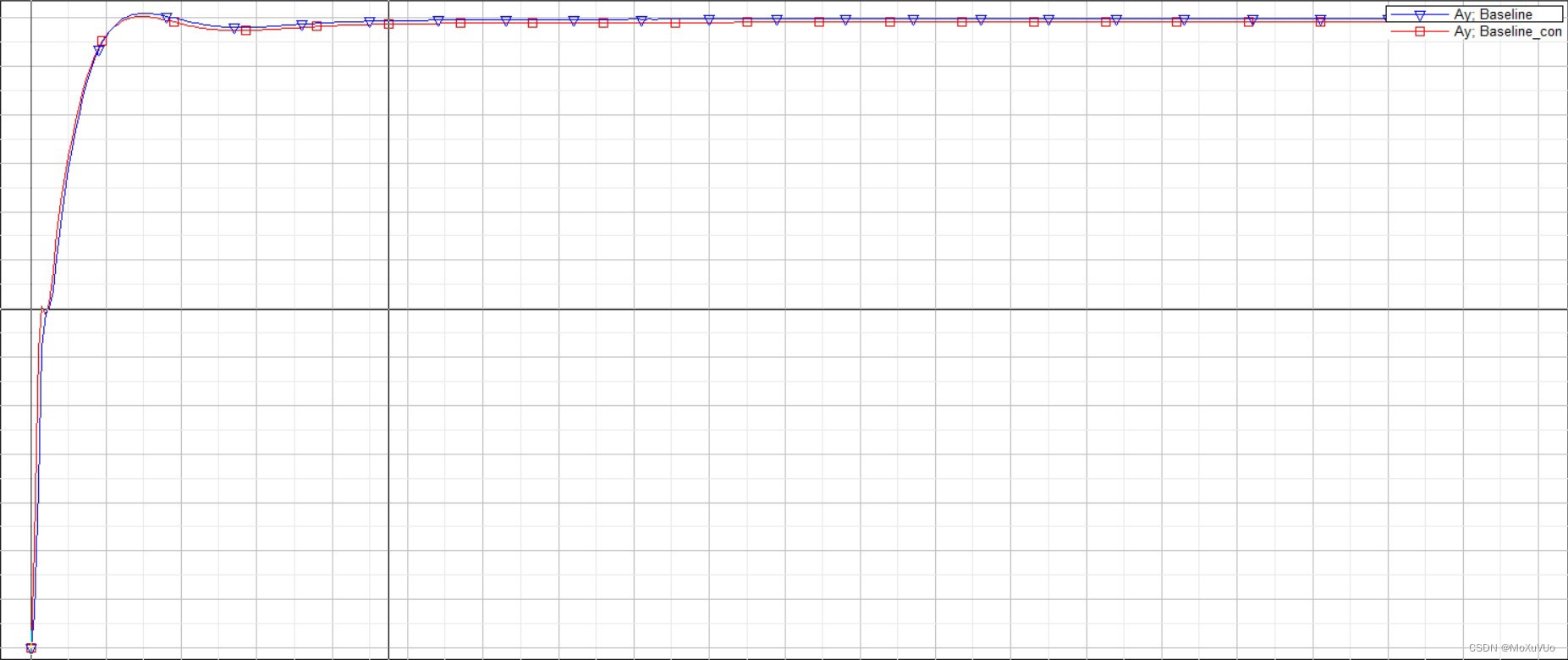
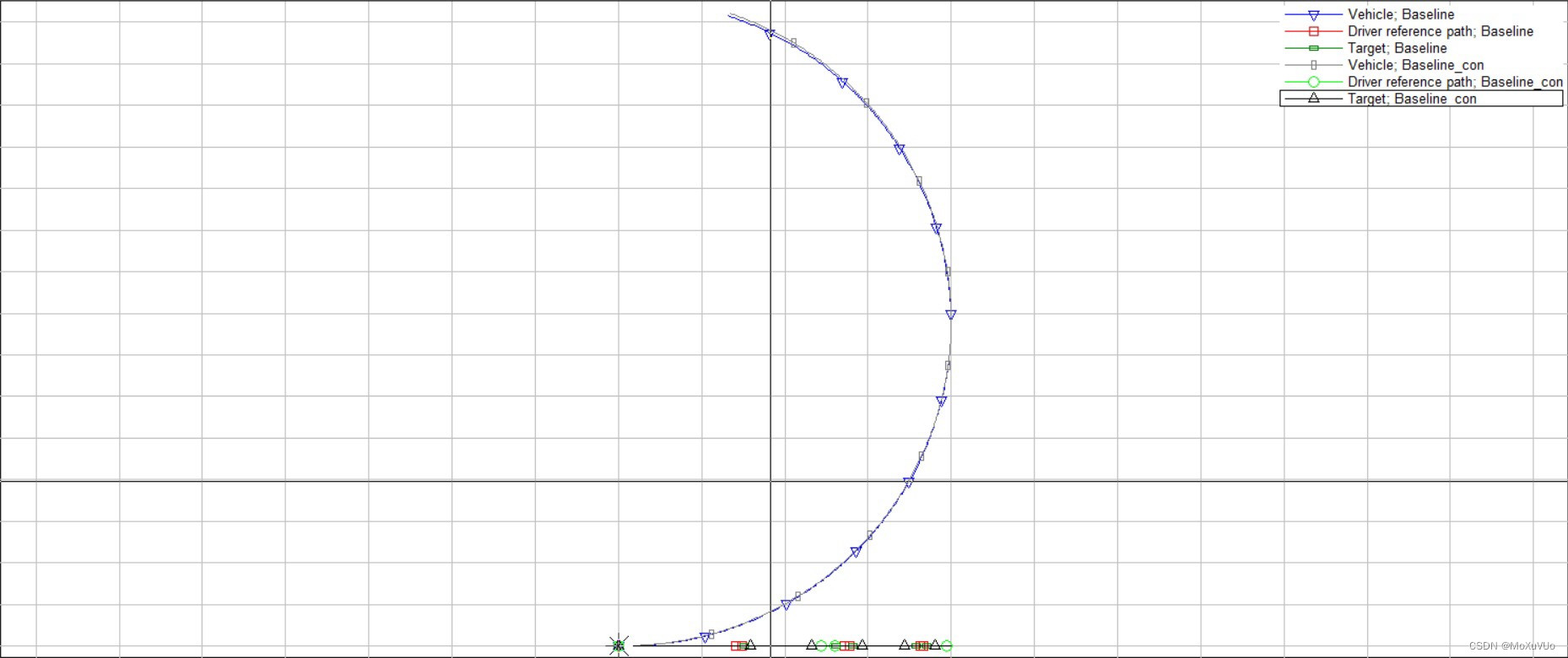
角阶跃工况下,仿真模型前轮转角、横摆角速度、侧向加速度、轨迹图。
最后一张图是 双移线 工况的响应曲线,拐角处响应跟对比的相比有差异。
不过不影响使用。
该卖品中包括 2019版 跟模型对应的Carsim数据库。
注:
模型中主要的内容为电机模型,其他是根据查表得出。
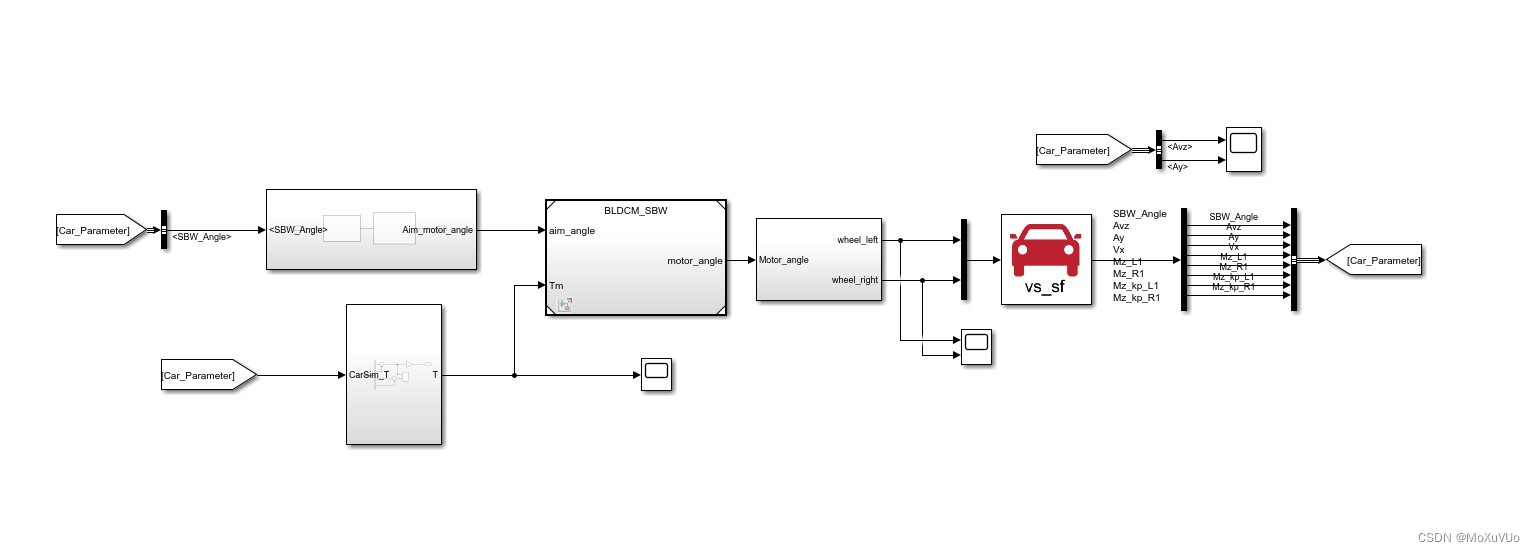
线控转向系统在汽车技术领域中起到至关重要的作用。本文将介绍一种基于Carsim和Simulink联合仿真模型的线控转向系统,该模型适用于C级车。我们的主要目标是利用三环PID控制算法控制无刷直流电机,以实现前轮转角的精确控制。
在本模型中,我们首先根据Carsim自带的转向系统,通过研究小齿轮和转向角之间的关系,建立了转向角与目标转角之间的查表法。这样,我们可以根据实际转向需求反推出目标转角,使得车辆能够按照预定的转向路径行驶。
接下来,我们利用无刷直流电机模型来跟踪目标转角。无刷直流电机是一种高效、可靠的驱动器,可以精确控制前轮的转动。通过正向建模,我们将电机模型与转向系统相连,并利用三环PID控制算法来实现前轮转角的控制。
在仿真过程中,我们进行了多组工况测试。图表显示了角阶跃工况下的仿真结果,包括前轮转角、横摆角速度、侧向加速度以及车辆行驶轨迹。我们还对双移线工况进行了测试,得到了响应曲线。尽管在拐角处的响应跟对比有一些差异,但这并不影响系统的使用。
总结来说,我们开发了一种基于Carsim和Simulink联合仿真模型的线控转向系统。该模型采用了三环PID控制算法来实现精确的前轮转角控制。通过正向建模和无刷直流电机模型的应用,我们成功地实现了目标转角的跟踪。这个模型不仅包含了电机模型,还提供了与之相对应的Carsim数据库。通过使用该模型,我们可以更好地理解和分析线控转向系统的性能,并为汽车技术的发展做出贡献。
相关代码,程序地址:http://lanzouw.top/701787074500.html















 383
383











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









