







一 、准备工具
1.读卡器
2.SD 卡
3.网线
4.键盘
5.鼠标
二、烧录
定义:可以理解为把电脑格式化,因为我们用的jetson nano 之前有人用过,我们需要把SD清空
插上读卡器时,会弹出很多盘,我们只需要把其中一个进行格式化就行了
第一步:
需要下载一个烧录用的软件,链接已给出!
JetPack SDK 4.4.1 archive | NVIDIA Developer
下载完成之后需要进行解压
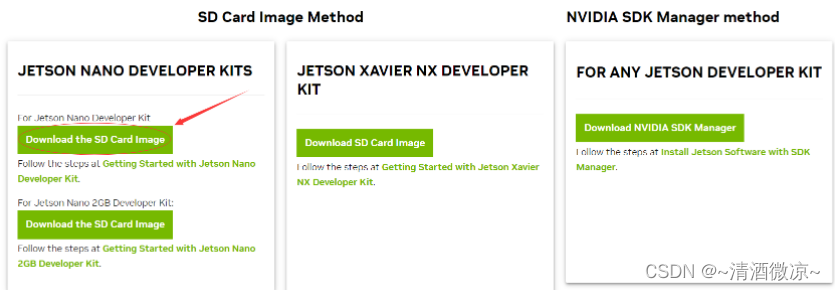
第二步:
我们还需要下载烧录SD卡的工具,链接在下边!Get Started With Jetson Nano Developer Kit | NVIDIA Developer
 下载完之后 是一个包,点击安装即可
下载完之后 是一个包,点击安装即可
安装完之后 就可以进行烧录拉!!!

然后开始烧录,会自动烧录两边
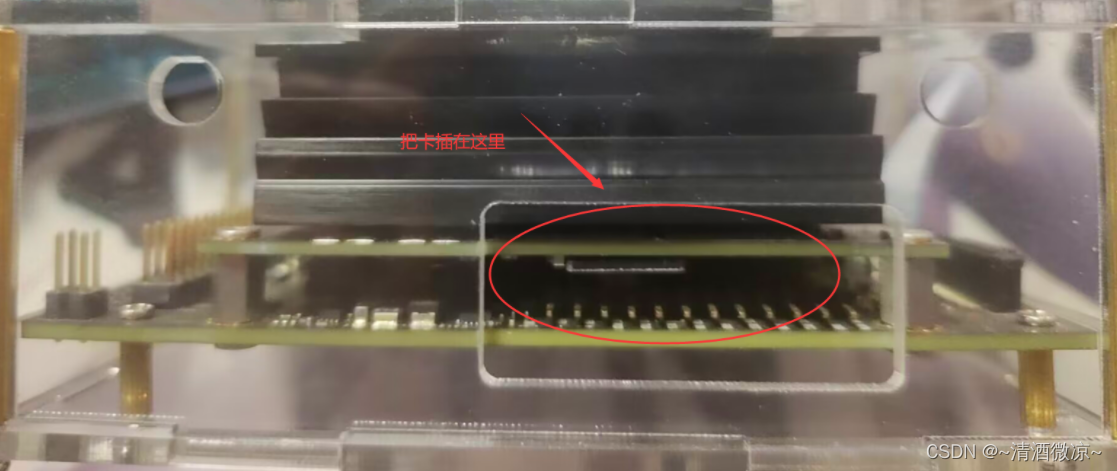
烧录完成之后便可以插卡开机
三、搭建环境
1.配置cuda
打开终端,输入命令:
sudo gedit ~/.bashrc
会弹出一个文档,拉到文档最下面,加上以下命令,保存并退出:
export CUDA_HOME=/usr/local/cuda-10.2
export LD_LIBRARY_PATH=/usr/local/cuda-10.2/lib64:$LD_LIBRARY_PATH
export PATH=/usr/local/cuda-10.2/bin:$PATH我们可以进行验证是否配置成功:
nvcc -V2.配置conda 环境
jetson nanoB01的架构是aarch64,与windows和liunx不同不同,所以不能安装Anaconda,可以安装一个替代它的archiconda。
输入命令:
wget https://github.com/Archiconda/build-tools/releases/download/0.2.3/Archiconda3-0.2.3-Linux-aarch64.sh
下载好之后输入一下命令:
bash Archiconda3-0.2.3-Linux-aarch64.sh下载完之后可以进行查看是否成功:
conda -V安装完成之后就可以配置环境了:
sudo gedit ~/.bashrc
会弹出一个文档,跟上边一样的操作,在底部加上一行命令,保存并退出:
export PATH=~/archiconda3/bin:$PATH
3.创建自己的虚拟环境
conda create -n xxx(虚拟环境名) python=3.6 #创建一个python3.6的虚拟环境
conda activate xxx 进入虚拟环境
conda deactivate 退出虚拟环境有的用这个命令会进不去虚拟环境,可以用下边这个命令就可以进去拉:
source activate xx4.换源
首先需要备份一下sources.list文件,执行后终端没有反应:
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak 进入文件:
sudo gedit /etc/apt/sources.list把里边内容全部删除,并换成一下内容,保存并退出:
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main multiverse restricted universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main multiverse restricted universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main multiverse restricted universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main multiverse restricted universe然后更新软件,保存到本地:
sudo apt-get update更新软件:
sudo apt-get upgrade这可能会报错:
例如:

解决方案:


即可完成!!!
升级所有的安装包,并解决依赖关系:
sudo apt-get dist-upgrade
5. 安装pip
sudo apt-get install python3-pip libopenblas-base libopenmpi-dev更新pip到最新版本:
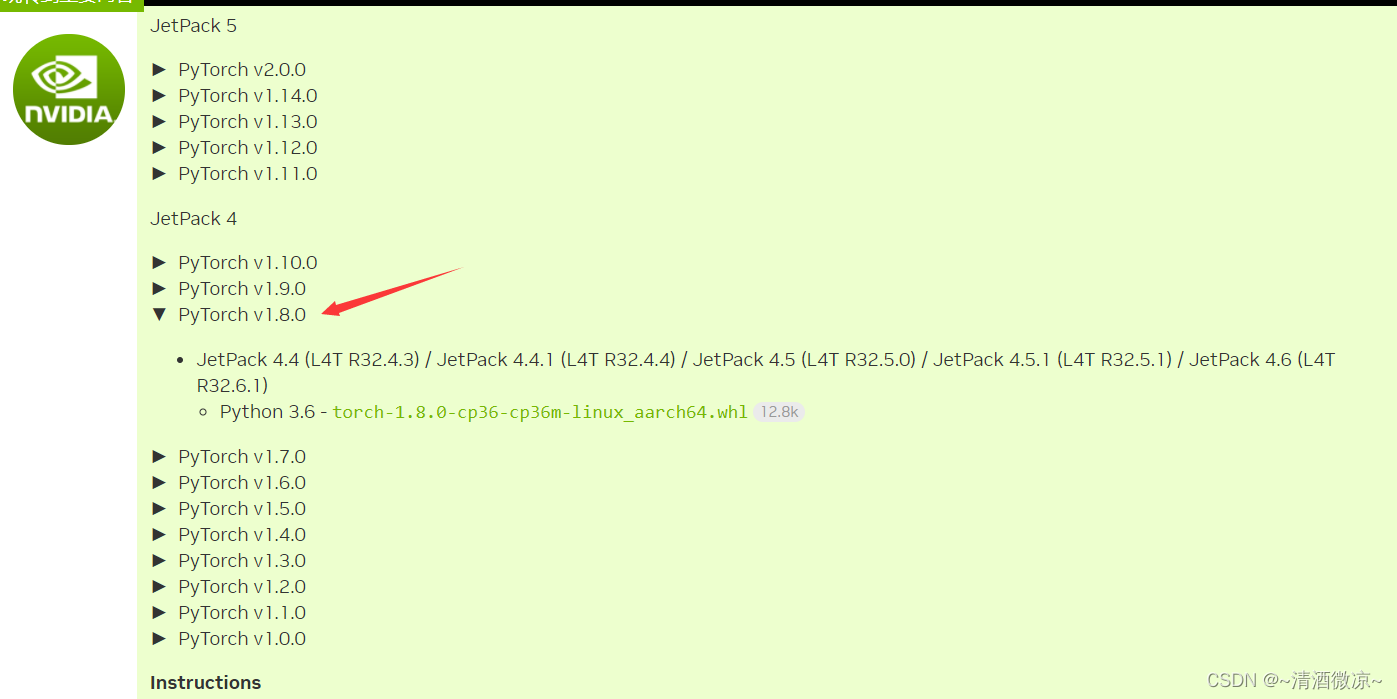
pip3 install --upgrade pip #如果pip已是最新,可不执行6. 下载torch和torchvision
我们需要到英伟达官网下载相对于的版本,我这里下载的1.8.0
链接:PyTorch for Jetson - version 1.10 now available - Jetson Nano - NVIDIA Developer Forums
因为我们在jetson nano 上下载torch和torchvision会出现太卡 进不去的情况,所有我们这里推荐一个工具(MobaXterm)用于连接板子进行互传,当然你也可以直接下载到U盘,用U盘实现互传。
我们可以看这位大佬教我们安装并使用(MobaXterm):
MobaXterm(终端工具)下载&安装&使用教程_蜗牛也不慢......的博客-CSDN博客
7、安装torch
首先我们打开终端,进入自己创建的虚拟环境,输入命令:
sudo apt-get install python3-pip libopenblas-base libopenmpi-dev pip install torch-1.8.0-cp36-cp36m-linux_aarch64.whl这时需要安装numpy,不然测试torch时不显示安装成功
sudo apt install python3-numpy测试torch,是否安装成功 首先输入命令进入python
import torch
print(torch.__version__)torch,在测试时报错:非法指令,核心已转储解决办法:
export OPENBLAS_CORETYPE=ARMV88、安装torchvision,逐个执行以下命令(如果执行第三个命令报错,不用管,继续执行第四第五行命令,如果不报错就直接cd ..)
cd torchvision
export BUILD_VERSION=0.9.0
sudo python setup.py install
python setup.py build
python setup.py install
cd ..测试torchvision 跟上边测试一样:
python
import torchvision
print(torchvision.__version__)在测试时如果报错PIL,就安装pillow,命令如下(在第二步如果报权限错误,就在开头加sudo,或在结尾加--user)
sudo apt-get install libjpeg8 libjpeg62-dev libfreetype6 libfreetype6-dev
python3 -m pip install -i https://mirrors.aliyun.com/pypi/simple pillow四、测试YOLOv5
1、去官网上下载需要的版本,我这里下载的是5.0版本,下载的时候要把对应的权重也要下载下来网址如下:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3442
3442











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









