






1. Ubuntu系统软件源
链接:ubuntu | 镜像站使用帮助 | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
源文件路径:/etc/apt/sources.list
备份默认源文件,创建新源文件,并选择匹配的源复制进去 #security源不建议替换

ros源:ros | 镜像站使用帮助 | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
sudo touch /etc/apt/sources.list.d/ros-latest.list
sudo gedit /etc/apt/sources.list.d/ros-latest.list将链接放入指定文件
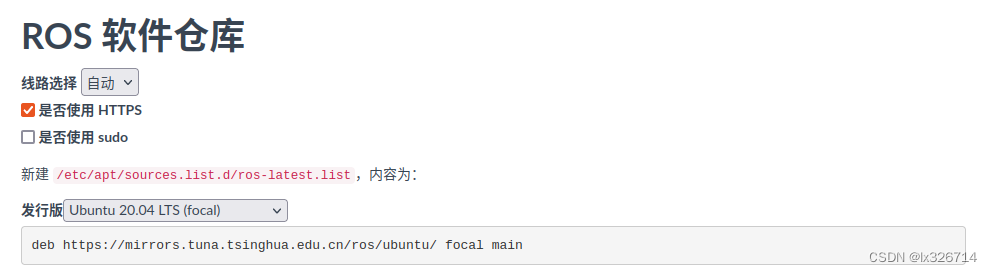
sudo apt update2. 安装ros
1. 配置公钥
#生成公钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
# 更新软件包索引
sudo apt update
2. 安装
完整版:
sudo apt install ros-noetic-desktop-full桌面版:
sudo apt install ros-noetic-ros-base基础版:
sudo apt install ros-noetic-ros-base3. 初始化
sudo apt install python3-rosdepsudo rosdep init && rosdep update安装依赖
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
4. 配置环境
# 导入ROS环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
# 立即刷新终端当前的环境
source ~/.bashrc
5. 测试
rosversion -d
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key 














 5万+
5万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









