









经常记不住,网站,也找不到地方,也就记下来吧,也帮助过来者。
 https://mirrors.tuna.tsinghua.edu.cn/help/ros/
https://mirrors.tuna.tsinghua.edu.cn/help/ros/https://mirrors.tuna.tsinghua.edu.cn/help/ros/首先如果你是新安装的Ubuntu,那么可能只有vi没有vim,建议先安装vim
$ sudo apt-get install vim然后编辑源,注意编辑源需要根据你自己的Ubuntu版本进行编辑。例如我的是16.04 LTS需要新建 /etc/apt/sources.list.d/ros-latest.list
$ sudo vi /etc/apt/sources.list.d/ros-latest.list输入i进入编辑默契,添加以下内容,添加完成后输入ESC键,在输入冒号(:),输入wq回车保存退出。

ROS 镜像使用帮助
1、如果是Ubuntu 18.04 LTS
新建 /etc/apt/sources.list.d/ros-latest.list,内容为:
deb https://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ bionic main
然后再输入如下命令,信任ROS的GPG Key,并更新索引:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update2、如果是Ubuntu 16.04 LTS
新建 /etc/apt/sources.list.d/ros-latest.list,内容为:
deb https://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ xenial main
然后再输入如下命令,信任ROS的GPG Key,并更新索引:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update3、如果是Ubuntu 14.04 LTS
新建 /etc/apt/sources.list.d/ros-latest.list,内容为:
deb https://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ trusty main
然后再输入如下命令,信任ROS的GPG Key,并更新索引:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update4、 Debian 9 (Stretch)
新建 /etc/apt/sources.list.d/ros-latest.list,内容为:
deb https://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ stretch main
然后再输入如下命令,信任ROS的GPG Key,并更新索引:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update5、Debian 8 (Jessie)
新建 /etc/apt/sources.list.d/ros-latest.list,内容为:
deb https://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ jessie main
然后再输入如下命令,信任ROS的GPG Key,并更新索引:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update然后你就可以按照以下网站,从1.4步骤进行安装了:
Ubuntu 16.04:
http://wiki.ros.org/kinetic/Installation/UbuntuUbuntu 18.04:
http://wiki.ros.org/melodic/Installation/UbuntuUbuntu 20.04:
http://wiki.ros.org/noetic/Installation/Ubuntu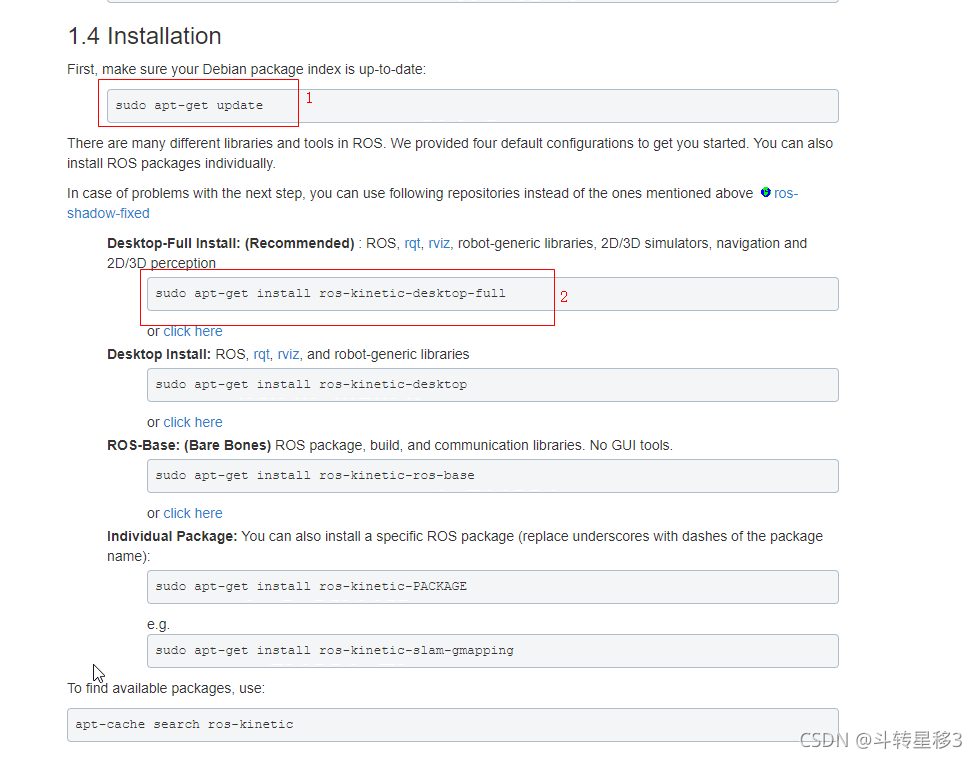
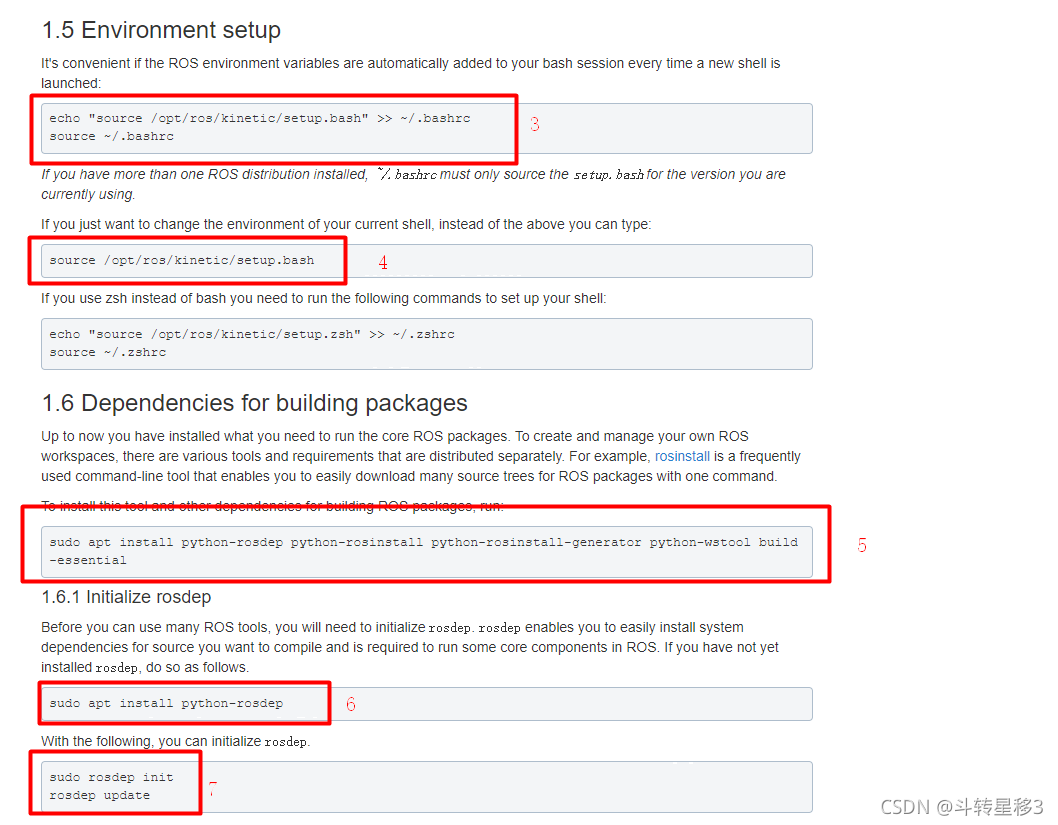
需要注意的是最后一步经常会被墙,需要你科学的去上网。或者使用手机热点给电脑使用,这样成功的概率比较大!最后一步如果没安装成功就多运行几次!
启动小海龟测试
1、启动ROS Master
~$ roscore
2、启动小海龟仿真器节点
~$ rosrun turtlesim turtlesim_node 3、启动小海龟键盘控制节点
~$ rosrun turtlesim turtle_teleop_key根据实测你的鼠标需要停在键盘节点的那个控制台使用方向盘控制海龟才可以动!不清楚是不是我操作有误!

















 4189
4189

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









