







 本文提供了在Ubuntu16.04上安装ROS Kinetic的详细步骤,包括配置资源库、设置sources.list、更新包列表以及检查可用的ROS包。
本文提供了在Ubuntu16.04上安装ROS Kinetic的详细步骤,包括配置资源库、设置sources.list、更新包列表以及检查可用的ROS包。
ROS kinetic官网:http://wiki.ros.org/kinetic/Installation/Ubuntu
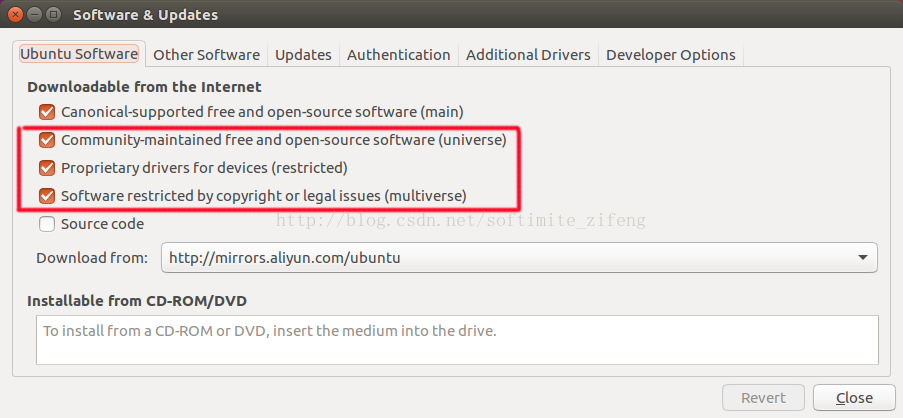
1. 配置Ubuntu的资源库:"restricted","universe"和"multiverse"。一般情况是不用配置的,参考下图红色框部分。
如果没有配置,可以参考Ubuntu官网:点击打开链接
2. 设置Ubuntu的sources.list
ROS kinetic官网:http://wiki.ros.org/kinetic/Installation/Ubuntu
1. 配置Ubuntu的资源库:"restricted","universe"和"multiverse"。一般情况是不用配置的,参考下图红色框部分。
如果没有配置,可以参考Ubuntu官网:点击打开链接
2. 设置Ubuntu的sources.list
 916
424
916
424

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























