







进入正题,前段时间做了一个通视分析的功能。
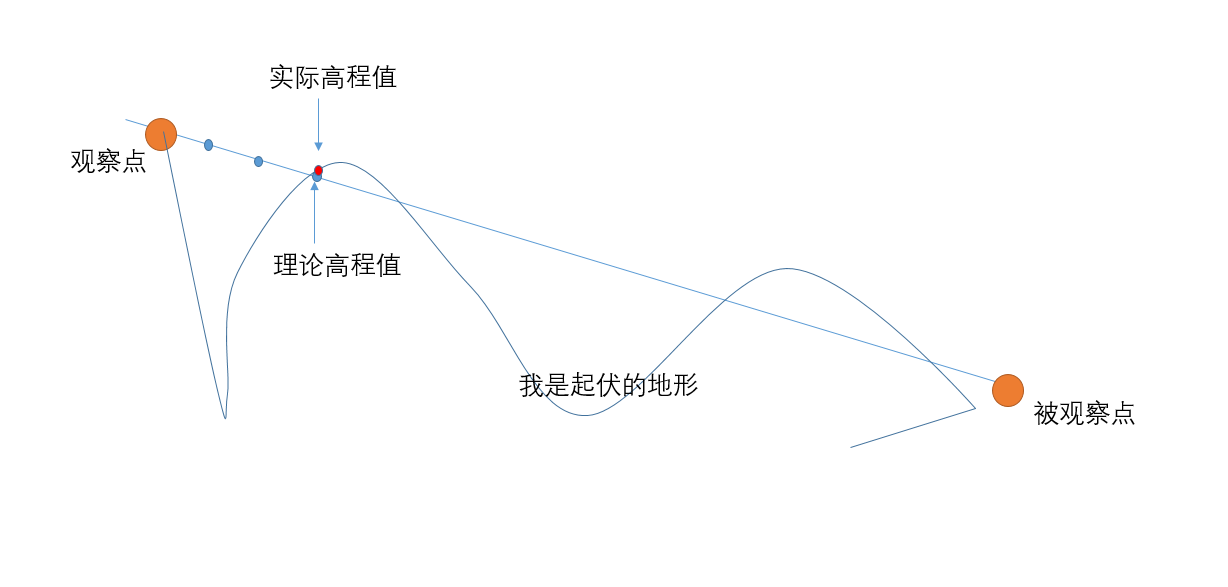
功能很简单:给定“观察点”与“目标点”,判断两点之间是否有“阻碍点”,并能够计算出阻碍点。效果如下图:

实现思路:仍然是“分而治之”,将观察点与被观察点连成的线段,分割成无限多的小段。获取每一段端点的实际高程值,与线段上该点的理论高程值。比较二者大小。若 实际高程值>理论高程值,则不通视,且理论高程值为障碍点。
技术关键点:(1)将线段分割为很多小段,并获取每一段的端点。
(2)线段上的点,需要同时获取屏幕坐标和真实世界坐标
tip:结果的准确性,取决于分割的颗粒度。
最新的规则要求博文有字数限制。
没办法,凑一点字数吧。希望后续我也能更新更多的三维相关的文章。
字数还不够?凑字君上线。聊一聊我最近做的功能吧:视频投放(简陋版)、点、线、填充绘制、飞行(flyTo)、粒子特效。但这些功能都有素材,所以不想写啦。

实现代码:
private sightline(startWorldPoint: Cesium.Cartesian3,
endWorldPoint: Cesium.Cartesian3):Cesium.Cartesian3{
let barrierPoint:Cesium.Cartesian3 = Cesium.Cartesian3.ZERO;
// const startWorldPoint = pickCartesian(this.viewer,startPoint).cartesian;
// const endWorlePoint = pickCartesian(this.viewer,endPoint).cartesian;
// console.log("start:" +startWorldPoint )
// console.log("end:" +endWorlePoint )
const startPoint = convertCartesian3ToCartesian2(this.viewer,startWorldPoint);
const endPoint = convertCartesian3ToCartesian2(this.viewer,endWorldPoint);
const worldLength = calculateSpatialDistance(startWorldPoint,endWorldPoint);
const windowLength = calculateWindowDistance(startPoint,endPoint);
const worldInterval = worldLength/100.0;
const windowInterval = windowLength/100.0;
for(let i = 1; i< 100; i++){
const tempWindowPoint = findWindowPositionByPixelInterval(startPoint,endPoint,windowInterval*i);
const tempPoint = findCartesian3ByDistance(startWorldPoint,endWorldPoint,worldInterval * i);
const surfacePoint = pickCartesian(this.viewer,tempWindowPoint);
const tempRad = Cesium.Cartographic.fromCartesian(tempPoint);
const surfaceRad = Cesium.Cartographic.fromCartesian(surfacePoint.cartesian);
if(surfaceRad.height > tempRad.height){
barrierPoint = tempPoint;
break;
}
}
return barrierPoint;
}
export function convertCartesian3ToCartesian2(viewer:Cesium.Viewer,position:Cesium.Cartesian3):Cesium.Cartesian2{
return Cesium.SceneTransforms.wgs84ToWindowCoordinates(viewer.scene,position)
}
export function calculateSpatialDistance(
startPoint: Cesium.Cartesian3,
endPoint: Cesium.Cartesian3
):number{
return Math.sqrt(Math.pow(endPoint.x - startPoint.x,2) + Math.pow(endPoint.y - startPoint.y,2) +Math.pow(endPoint.z - startPoint.z,2) );
}
export function calculateWindowDistance(startPoint: Cesium.Cartesian2,endPoint: Cesium.Cartesian2):number{
return Math.sqrt(Math.pow(endPoint.y - startPoint.y,2) + Math.pow(endPoint.x - startPoint.x,2));
}
export function findWindowPositionByPixelInterval(startPosition:Cesium.Cartesian2,endPosition:Cesium.Cartesian2,interval:number):Cesium.Cartesian2{
const result = new Cesium.Cartesian2(0,0);
const length = Math.sqrt(Math.pow(endPosition.x - startPosition.x,2) + Math.pow(endPosition.y - startPosition.y,2));
if(length< interval){
return result;
}else{
const x = (interval/length)*(endPosition.x - startPosition.x) + startPosition.x;
//alert(interval/length)
const y = (interval/length)*(endPosition.y - startPosition.y) + startPosition.y;
result.x = x;
result.y = y;
}
return result;
}
export function findCartesian3ByDistance(startPosition:Cesium.Cartesian3,endPosition:Cesium.Cartesian3,interval:number):Cesium.Cartesian3{
const result = new Cesium.Cartesian3(0,0,0);
const length = Math.sqrt(Math.pow(endPosition.z-startPosition.z,2)+Math.pow(endPosition.x - startPosition.x,2) + Math.pow(endPosition.y - startPosition.y,2));
if(length< interval){
return result;
}else{
const x = (interval/length)*(endPosition.x - startPosition.x) + startPosition.x;
//alert(interval/length)
const y = (interval/length)*(endPosition.y - startPosition.y) + startPosition.y;
const z = (interval/length)*(endPosition.z - startPosition.z) + startPosition.z;
result.x = x;
result.y = y;
result.z = z;
}
return result;
}
export function pickCartesian(viewer:Cesium.Viewer,windowPosition:Cesium.Cartesian2):PickResult{
//根据窗口坐标,从场景的深度缓冲区中拾取相应的位置,返回笛卡尔坐标。
const cartesianModel = viewer.scene.pickPosition(windowPosition);
//场景相机向指定的鼠标位置(屏幕坐标)发射射线
const ray = viewer.camera.getPickRay(windowPosition);
//获取射线与三维球相交的点(即该鼠标位置对应的三维球坐标点,因为模型不属于球面的物体,所以无法捕捉模型表面)
const cartesianTerrain = viewer.scene.globe.pick(ray,viewer.scene);
const result = new PickResult();
if(typeof(cartesianModel) !== 'undefined' && typeof(cartesianTerrain) !== 'undefined'){
result.cartesian = cartesianModel || cartesianTerrain;
result.CartesianModel = cartesianModel;
result.cartesianTerrain = cartesianTerrain as Cesium.Cartesian3;
result.windowCoordinates = windowPosition.clone();
//坐标不一致,证明是模型,采用绝对高度。否则是地形,用贴地模式。
result.altitudeMode = cartesianModel.z.toFixed(0) !== cartesianTerrain!.z.toFixed(0) ? Cesium.HeightReference.NONE:Cesium.HeightReference.CLAMP_TO_GROUND;
}
return result;
}














 506
506











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









