







图像几何变换之仿射变换
1:定义:仿射变换的功能是从二维坐标到二维坐标之间的线性变换,且保持二维图形的“平直性”和“平行性”(直线之间的相对位置关系保持不变,平行线经仿射变换后依然为平行线,且直线上点的位置顺序不会发生变化)。非共线的三对对应点确定一个唯一的仿射变换。。仿射变换可以通过一系列的原子变换的复合来实现,包括平移,缩放,翻转,旋转和剪切。
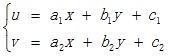
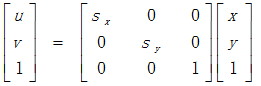
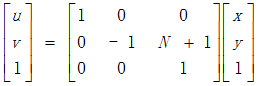
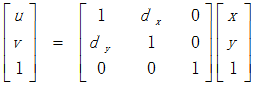
这类变换可以用一个3*3的矩阵M来表示,其最后一行为(0,0,1)。该变换矩阵将原坐标为(x,y)变换为新坐标(u,v),
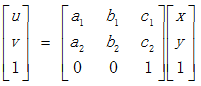
其数学表达式形式如下:
对应的齐次坐标矩阵表示形式为:
2. 二维图像仿射变换
怎么求得仿射变换?——————————利用两组三点坐
1:我们已知  和 T 而且我们知道他们是有联系的. 接下来我们的工作就是求出矩阵
和 T 而且我们知道他们是有联系的. 接下来我们的工作就是求出矩阵 
2:我们已知 and . 要想求得  . 我们只要应用算式
. 我们只要应用算式  即可. 对于这种联系的信息可以用矩阵 清晰的表达 (即给出明确的2×3矩阵) 或者也可以用两幅图片点之间几何关系来表达.
即可. 对于这种联系的信息可以用矩阵 清晰的表达 (即给出明确的2×3矩阵) 或者也可以用两幅图片点之间几何关系来表达.
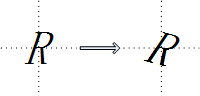
让我们形象地说明一下. 因为矩阵 联系着两幅图片, 我们以其表示两图中各三点直接的联系为例. 见下图:
-
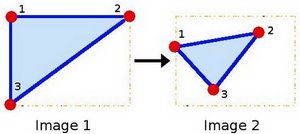
点1, 2 和 3 (在图一中形成一个三角形) 与图二中三个点一一映射, 仍然形成三角形, 但形状已经大大改变. 如果我们能通过这样两组三点求出仿射变换 (你能选择自己喜欢的点), 接下来我们就能把仿射变换应用到图像中所有的点.
图像处理中,可应用仿射变换对二维图像进行平移、缩放、旋转等操作。
经仿射变换后,图像关键点依然构成三角形,但三角形形状已经发生变化。
opencv中有一个函数:Mat getAffineTransform(InputArraysrc, InputArraydst),直接根据两组三个点的坐标求出仿射变换矩阵,然后再利用warpAffine函数可以求出图像之间的仿射变换。
3. 原子变换
仿射变换通过一系列原子变换复合实现,具体包括:平移(Translation)、缩放(Scale)、旋转(Rotation)、翻转(Flip)和错切(Shear)。
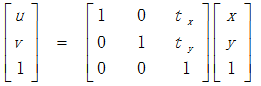
a. 平移

b. 缩放

c. 旋转(绕原点进行旋转变换)

目标图形以(x,y)为轴心顺时针旋转θ弧度,变换矩阵为
相当于两次平移与一次原点旋转变换的复合,即先将轴心(x,y)移到到原点,然后做旋转变换,最后将图片的左上角置为图片的原点,即
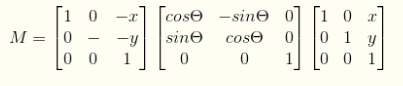
有的人可能会说为什么这么复杂呢,那是因为在opencv的图像处理中,所有对图像的处理都是从原点进行的,而图像的原点默认为图像的左上角,而我们对图像作旋转处理时一般以图像的中点为轴心,因此就需要做如下处理
如果你觉得这样很麻烦,可以使用opencv中自带的MatgetRotationMatrix2D(Point2f center, double angle, double scale)函数获得变换矩阵M,
center:旋转中心
angle:旋转弧度,一定要将角度转换成弧度
scale:缩放尺度
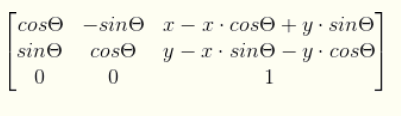
它得到的矩阵是:
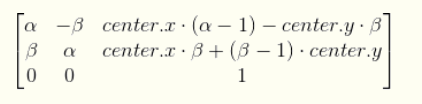
其中α = scale * cos( angle ) , β = scale * sing( angle ) , ( center.x , center.y ) 表示旋转轴心
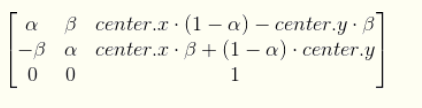
但是不得不说opencv的文档以及相关书籍中都把这个矩阵写错了,如下:
d. 翻转

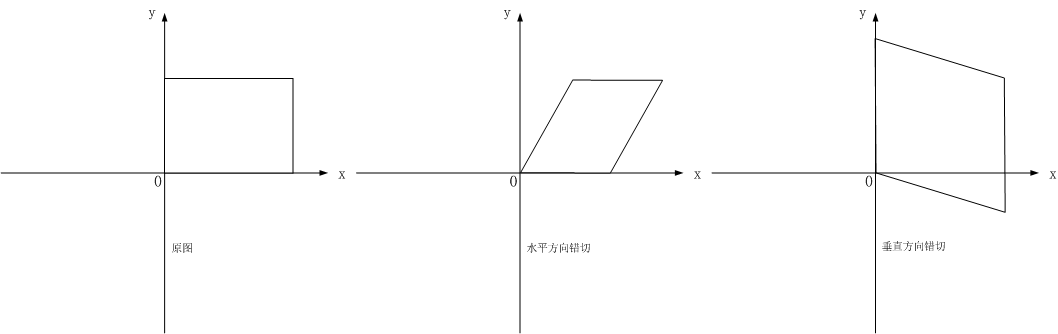
e. 错切
错切亦称为剪切或错位变换,包含水平错切和垂直错切,常用于产生弹性物体的变形处理。
代码如下:
#include<opencv2\opencv.hpp>
#include<opencv2\imgproc\imgproc.hpp>
using namespace cv;
using namespace std;
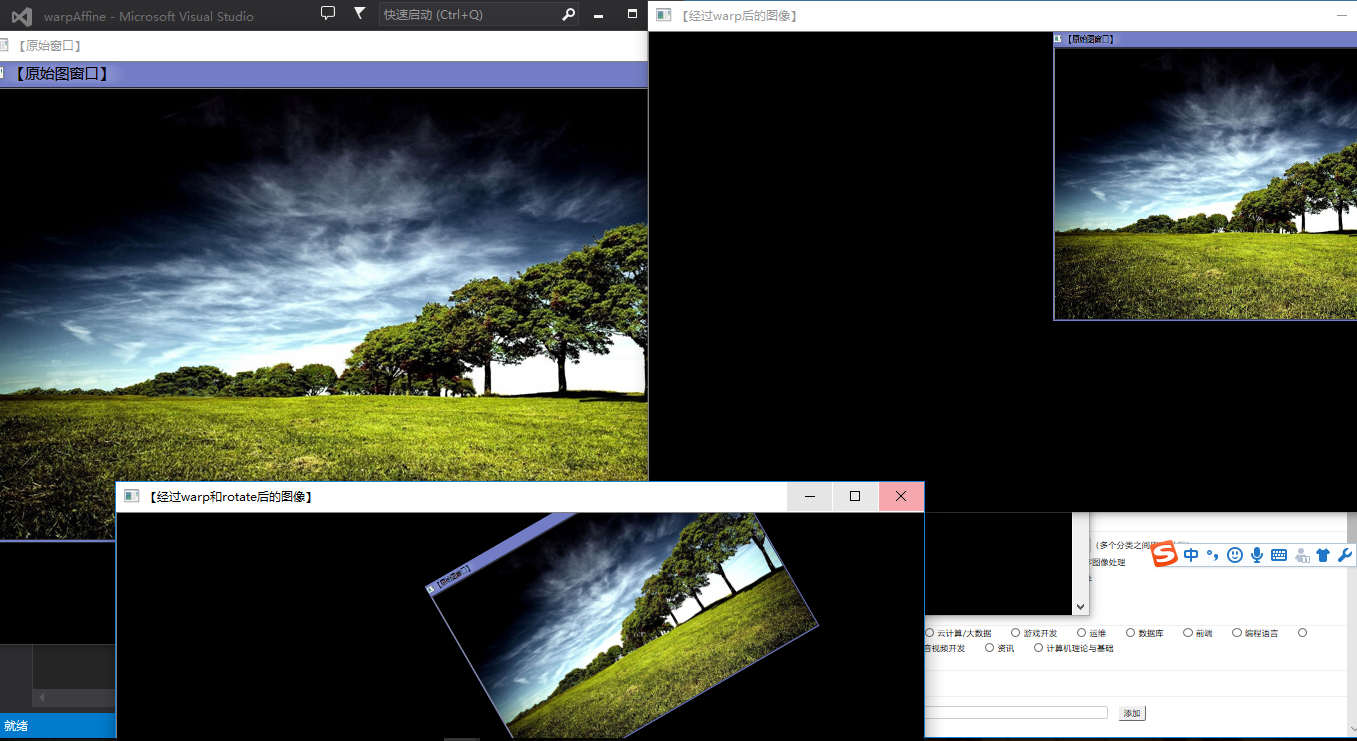
#define WINDOW_NAME1 "【原始窗口】"
#define WINDOW_NAME2 "【经过warp后的图像】"
#define WINDOW_NAME3 "【经过warp和rotate后的图像】"
int main()
{
Point2f srcTriangle[3]; //Point 类中有两个成员变量 ,Point2f 就是Point<float>
Point2f dstTriangle[3];
Mat rotMat(2, 3, CV_32FC1); //Mat 对象(矩阵)初始化,2行3列
Mat warpMat(2, 3, CV_32FC1);
Mat srcImage, dstImage_warp, dstImage_warp_rotate;
srcImage = imread("*************\\图7.38 原始图.jpg");
if (!srcImage.data)
{
printf("读取图片错误");
return false;
}
dstImage_warp = Mat::zeros(srcImage.rows, srcImage.cols,srcImage.type());
imshow("dstImage_warp", dstImage_warp);
/************************由三点计算仿射变换***************/
srcTriangle[0] = Point2f(0, 0);
srcTriangle[1] = Point2f(static_cast<float>(srcImage.cols-1),0);
srcTriangle[2] = Point2f(0,static_cast<float>(srcImage.rows- 1));
dstTriangle[0] = Point2f(static_cast<float>(srcImage.cols*0.5), static_cast<float>(srcImage.rows*0.0));
dstTriangle[1] = Point2f(static_cast<float>(srcImage.cols-1), static_cast<float>(srcImage.rows*0.0));
dstTriangle[2] = Point2f( static_cast<float>(srcImage.cols*0.5), static_cast<float>(srcImage.rows*0.6));
warpMat = getAffineTransform(srcTriangle, dstTriangle);//获取变换矩阵第一个参数输入三个点,第二个参数输出三个点
warpAffine(srcImage,
dstImage_warp,
warpMat, //inputArray类型的M ,2x3的变换矩阵
dstImage_warp.size());//第四个参数表示输出图像的尺寸
/*******************旋转变换*************************************/
Point center = Point(dstImage_warp.cols / 2, dstImage_warp.rows / 2);
double angle = 30.0; //逆时针为负
double scale = 0.8;
rotMat = getRotationMatrix2D(center, angle, scale);
warpAffine(dstImage_warp, dstImage_warp_rotate, rotMat,dstImage_warp.size());
imshow(WINDOW_NAME1, srcImage);
imshow(WINDOW_NAME2, dstImage_warp);
imshow(WINDOW_NAME3, dstImage_warp_rotate);
waitKey(0);
return 0;
}















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









