






相机作为视觉控制器最重要的传感器之一,并且作为一种可拔插的设备,判断其功能是否正常工作是非常重要的。相机的诊断我认为可以分为以下三种类型:
- 电源诊断,包括相机开路、短路、过流过压等电源故障的判断
- 图像信号诊断,包括视频流信号是否正常、控制信号是否正常、帧率、分辨率等图像信号故障的判断
- 图像质量诊断,包括相机是否被遮挡、安装位置是否正常等故障的判断
电源诊断
我们的控制器使用了Maxim的max20087作为相机PoC的PMIC,按美信的说法是该款芯片是“业界唯一的ASIL级摄像机保护器”,最多支持4通道输出,支持过流过压保护。最重要的是可以通过I2C将诊断信息的读出,可读的信息包括输入输出通道的电压、电流,输出通道的过流过压欠压等信息。相机电源诊断就是通过这些信息判断是否存在电源故障。
max20087官网 https://www.maximintegrated.com/cn/products/analog/analog-switches-multiplexers/MAX20087.html
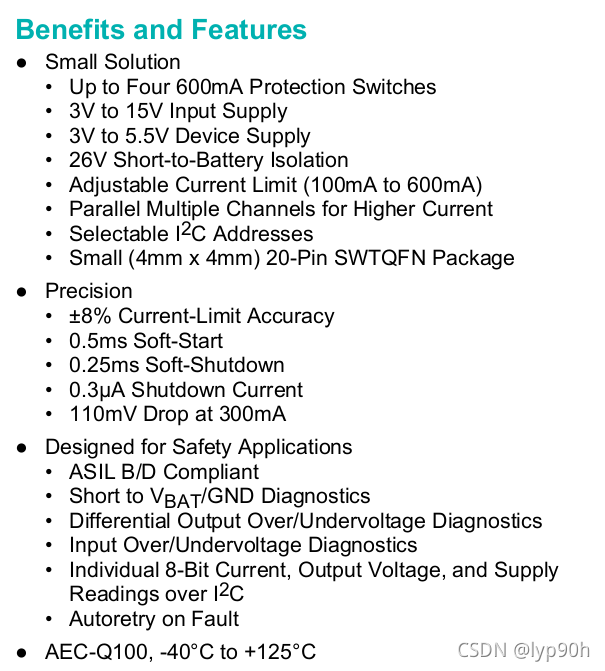
图1.max20087特性
根据max20087的特性,实现下表中的故障类型。故障码定义不符合ISO14229标准,仅作为例子展示
| 故障码(hex) | 故障描述 | 判断标准 | 备注 |
| 无 | 相机工作正常 | 输入电压、输出电压、输出电流均正常,各异常标志位未置位 | |
| 400400 | 相机0未连接 | 输出电压=输入电压,电流为0 | |
| 400401 | 相机1未连接 | ||
| 400402 | 相机2未连接 | ||
| 400403 | 相机3未连接 | ||
| 400404 | 通道0短路 | 输出电压为0,过流或欠压或过热保护标志位置位 | |
| 400405 | 通道1短路 | ||
| 400406 | 通道2短路 | ||
| 400407 | 通道3短路 | ||
| 400408 | 相机0已连接但未开始工作 | 输出电压正常,但电流小于正常工作电流,相机I2C访问正常 | 需要提前采样工作正常时的电流,需要主控去访问摄像头 |
| 400409 | 相机1已连接但未开始工作 | ||
| 40040a | 相机2已连接但未开始工作 | ||
| 40040b | 相机3已连接但未开始工作 | ||
| 40040c | 相机0已连接但损坏了 | 输出电压远小于输入电压,电流远小于或远大于正常工作电流,相机I2C无法访问,但过流和欠压和过热保护标志位均未置位 | 需要提前采样工作正常时的电流,需要主控去访问摄像头 |
| 40040d | 相机1已连接但损坏了 | ||
| 40040e | 相机2已连接但损坏了 | ||
| 40040f | 相机3已连接但损坏了 | ||
| 400410 | 通道0输入电压过压 | 过压标志位置位 | |
| 400411 | 通道1输入电压过压 | ||
| 400412 | 通道2输入电压过压 | ||
| 400413 | 通道3输入电压过压 | ||
| 400414 | PMIC无法访问 | max20087 i2c无法访问 |
状态读出
要实现故障的判断,需要先把max20087的寄存器通过i2c读出,再通过一系列的逻辑判断出故障类型。需要注意的是,读取该芯片寄存器的时候,需要先把芯片EN引脚拉高。
电压和电流
max20087的电压电流是通过8位的ADC采样实现的,需要读出的值有 4个通道的电压+4个通道的电流+输入电压+芯片供电电压,一共10个值,但ADC寄存器只有4个。因此max20087通过设置mux寄存器,将ADC分时复用实现11个值的转换(有一个值没有用到)。
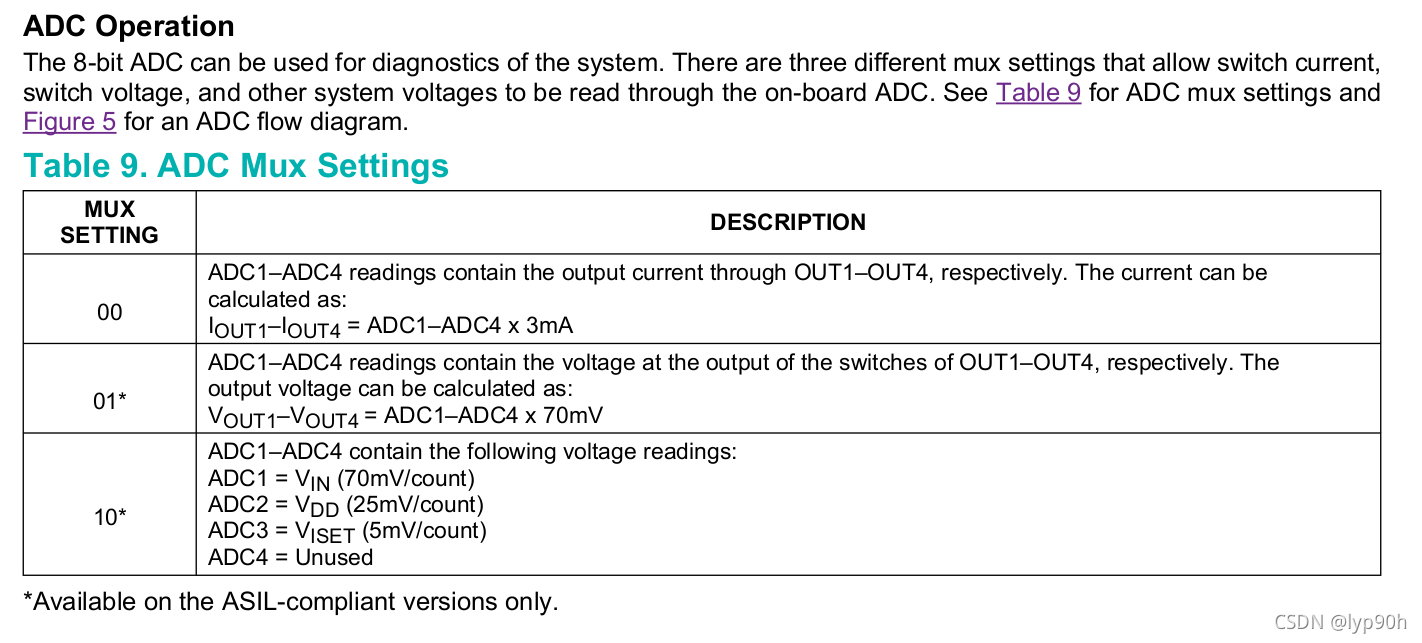
图2. max20087 ADC描述
实现起来也很简单,直接上代码。输入参数index指哪片max20087,因为板子上放置了3颗max20087;mode指ADC对哪部分进行采样,即mux setting;result是输出结果,传入长度为4的uint16_t类型的数组的指针。
int max20087_read_adc(uint8_t index, uint8_t mode, uint16_t* result) {
uint8_t val = 0;
int ret = 0;
uint8_t max20087_addr = max20087_addr_group[index];
uint8_t adc[4];
uint8_t wait_adc_complete_retry = 2;
/*set ADC mux to 01 = ADC1–ADC4 registers contain the output-voltage readings of each output*/
ret |= i2c_read_8_8(I2C_BUS, max20087_addr, 0x01, &val, 0);
val &= 0x3f;
if(mode == VOLTAGE_OUT_MODE) {
val |= (1 << 6);
} else if(mode == VOLTAGE_CHIP_MODE) {
val |= (1 << 7);
}
ret |= i2c_write_8_8(I2C_BUS, max20087_addr, 0x01, val, 0);
// waiting for adc conversion complete
while(--wait_adc_complete_retry) {
ret |= i2c_read_8_8(I2C_BUS, max20087_addr, 0x03, &val, 1);
if((val >> 4) & 1) {
break;
}
}
if(!wait_adc_complete_retry) {
return -2;
}
ret |= i2c_read_8_8(I2C_BUS, max20087_addr, 0x06, &adc[0], 0);
ret |= i2c_read_8_8(I2C_BUS, max20087_addr, 0x07, &adc[1], 0);
ret |= i2c_read_8_8(I2C_BUS, max20087_addr, 0x08, &adc[2], 0);
ret |= i2c_read_8_8(I2C_BUS, max20087_addr, 0x09, &adc[3], 0);
if(ret) {
return ret;
}
for(val=0; val<4; ++val) {
if(mode == CURRENT_OUT_MODE) {
/*
* ADC1–ADC4 readings contain the output current through OUT1–OUT4, respectively. The current can be
* calculated as:
* I OUT1 –I OUT4 = ADC1–ADC4 x 3mA
*/
*(result+val) = adc[val] * 3;
} else if (mode == VOLTAGE_OUT_MODE) {
/*
* ADC1–ADC4 readings contain the voltage at the output of the switches of OUT1–OUT4, respectively. The
* output voltage can be calculated as:
* V OUT1 –V OUT4 = ADC1–ADC4 x 70mV
*/
*(result+val) = adc[val] * 70;
}
}
if (mode == VOLTAGE_CHIP_MODE) {
/*
* ADC1–ADC4 contain the following voltage readings:
* ADC1 = V IN (70mV/count)
* ADC2 = V DD (25mV/count)
* ADC3 = V ISET (5mV/count)
* ADC4 = Unused
*/
*(result) = adc[0] * 70;
*(result+1) = adc[1] * 25;
*(result+2) = adc[2] * 5;
}
return ret;
}诊断标志位读出
芯片已经实现了输出通道的过流、过压、欠压、过热关闭,以及输入的过压,欠压检测功能,检测结果直接存储在寄存器中,只需要简单的读出即可。
直接上代码,result是输出结果,使用一个长度为3的uint8_t类型数组
int max20087_read_stat(uint8_t index, uint8_t* result) {
int ret = 0;
uint8_t max20087_addr = max20087_addr_group[index];
ret |= i2c_read_8_8(I2C_BUS, max20087_addr, 0x03, result, 0);
ret |= i2c_read_8_8(I2C_BUS, max20087_addr, 0x04, result+1, 0);
ret |= i2c_read_8_8(I2C_BUS, max20087_addr, 0x05, result+2, 0);
return ret;
}故障诊断
首先实现的判断相机是否连接,当输出电压等于输入电压,并且各异常标志位没有置位时认为相机没有连接。考虑到ADC可能会有误差,因此代码上会做一个容错。
代码中的SET_BIT.....语句是与UDS协议中DTC有关的一个状态,后面会单独写文章描述。
int camera_is_connected(uint16_t voltage_out, uint16_t current_out, uint8_t ts, uint8_t oc, uint8_t ov, uint8_t uv, uint32_t dtc) {
//当输出电压=输入电压(考虑到采样误差以及内部压降,当两者差的绝对值小于140mv认为两者相等,即ADC的5个采样误差,2x70=140mV),
//ts,oc,ov,uv标志位均未置位,
//输出电流=0(考虑到采样误差,当电流小于5mv,即1个ADC采样误差,1x3=3mA,认为相机未连接
struct uds_dtc* dtc_handler = get_dtc_handler(dtc);
if(!dtc_handler) {
return -DTC_NOT_FOUND;
}
if(abs(voltage_out - DIA_CAMERA_POWER_STATUS->voltage_vin) < 140 && current_out < 3 && !ts && !oc && !ov && !uv) {
SET_BIT(dtc_handler->status, DTC_STATS_BIT_TEST_FAILED);
SET_BIT(dtc_handler->status, DTC_STATS_BIT_PENDING_DTC);
if(dtc_handler->cycle > dtc_handler->threshold) {
SET_BIT(dtc_handler->status, DTC_STATS_BIT_CONFIRMED_DTC);
CLR_BIT(dtc_handler->status, DTC_STATS_BIT_PENDING_DTC);
// TODO 根据实际需求决定是否实现将该dtc写入非易失内存
}
++dtc_handler->cycle;
} else if (abs(voltage_out - DIA_CAMERA_POWER_STATUS->voltage_vin) < 140 && current_out > 27 && !ts && !ov && !uv && !oc) {
CLR_BIT(dtc_handler->status, DTC_STATS_BIT_TEST_FAILED);
if(dtc_handler->cycle > 0)
--dtc_handler->cycle;
}
return UDS_SUCCESS;
}然后是判断相机通道是否短路,当输出电压等于0,并且欠压和过流标志位置位时认为该通道已经短路到地。
int channel_is_short2gnd(uint16_t voltage_out, uint8_t uv, uint8_t oc, uint32_t dtc) {
// 当输出电压=0,欠压标志位和过流标志位置位时认为通道处于短路状态
struct uds_dtc* dtc_handler = get_dtc_handler(dtc);
if(!dtc_handler) {
return -DTC_NOT_FOUND;
}
if(voltage_out < 140 && uv && oc) {
SET_BIT(dtc_handler->status, DTC_STATS_BIT_TEST_FAILED);
SET_BIT(dtc_handler->status, DTC_STATS_BIT_PENDING_DTC);
if(dtc_handler->cycle > dtc_handler->threshold) {
SET_BIT(dtc_handler->status, DTC_STATS_BIT_CONFIRMED_DTC);
CLR_BIT(dtc_handler->status, DTC_STATS_BIT_PENDING_DTC);
// TODO 根据实际需求决定是否实现将该dtc写入非易失内存
}
++dtc_handler->cycle;
} else if (abs(voltage_out - DIA_CAMERA_POWER_STATUS->voltage_vin) < 140 && !uv && !oc) {
// 当输出电压=输入电压,欠压标志位和过流标志位清除的时候认为短路情况已恢复
CLR_BIT(dtc_handler->status, DTC_STATS_BIT_TEST_FAILED);
if(dtc_handler->cycle > 0)
--dtc_handler->cycle;
}
return UDS_SUCCESS;
}判断通道是否过压(短路到电源),当ov标志位置位时即认该通道短路到电源。
int channel_is_over_voltage(uint8_t ov, uint32_t dtc) {
// 当过压标志位置位时认为是过压(短路到电源)
struct uds_dtc* dtc_handler = get_dtc_handler(dtc);
if(!dtc_handler) {
return -DTC_NOT_FOUND;
}
if(ov) {
SET_BIT(dtc_handler->status, DTC_STATS_BIT_TEST_FAILED);
SET_BIT(dtc_handler->status, DTC_STATS_BIT_CONFIRMED_DTC);
++dtc_handler->cycle;
} else {
CLR_BIT(dtc_handler->status, DTC_STATS_BIT_TEST_FAILED);
--dtc_handler->cycle;
}
return UDS_SUCCESS;
}至于相机连接了但工作不正常的故障码,需要与相机的诊断相配合,只有电源诊断是无法实现的,后面会再用几篇文章专门介绍。

















 385
385

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









