







Floyd算法是一个求解加权连通图中任意两点之间最短路径的算法,是个很值得品味的算法。
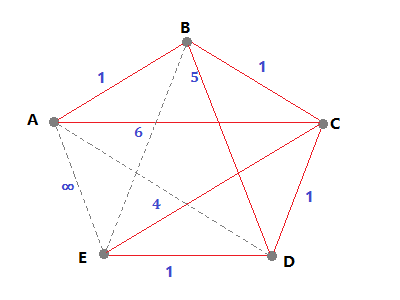
如上图所示,这是一个无向加权连通图,不相连的点用虚线连接,其权值为∞。
我们希望得到A->E的最小距离,根据目测能得到正确结果4(ABCDE走一圈)。
我们把连通图转为邻接矩阵,因为是无向图,所以该图沿对角线对称(如果是有向图则非对称)
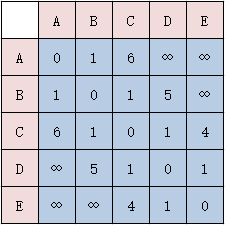
Floyd算法所做的就是不断优化该邻接矩阵的路径权值,直到整个任意两点的距离都变为最小距离。
下面上代码,简单到不像寻路算法:
public const int Z = 10000000;
const int VERTEX_COUNT = 5;
public int[,] map = new int[VERTEX_COUNT, VERTEX_COUNT]
{ {0, 1, 4, 4, 1},
{1, 0, 1, Z, 3},
{4, 1, 0, Z, 8},
{4, Z, Z, 0, Z},
{1, 3, 8, Z, 0}};
public int[,] path = new int[VERTEX_COUNT, VERTEX_COUNT];
// 核心处理方法
public void DoFloyd()
{
for (int i = 0; i < VERTEX_COUNT; i++)
{
for (int j = 0; j < VERTEX_COUNT; j++)
{
path[i, j] = -1;
}
}
for (int k = 0; k < VERTEX_COUNT; k++)
{
for (int i = 0; i < VERTEX_COUNT; i++)
{
for (int j = 0; j < VERTEX_COUNT; j++)
{
if (map[i, j] > map[i, k] + map[k, j])
{
map[i, j] = map[i, k] + map[k, j];
path[i, j] = k;
}
}
}
}
}
// 获取两点间的距离
public int GetDistance(int from, int to)
{
return map[from, to];
}
// 获取两点间的路径
public List<int> GetPath(int from, int to)
{
if (map[from, to] >= Z)
{
// 无法连通
return null;
}
List<int> p = new List<int>();
p.Add(from);
Stack<int> stack = new Stack<int>();
stack.Push(to);
stack.Push(from);
while (stack.Count > 0)
{
from = stack.Pop();
to = stack.Pop();
int pass = path[from, to];
if (pass == -1)
{
// 这条边没有被其他点优化,直接走就对了
p.Add(to);
}
else
{
// 这条边被优化了,我们拆成两段重新检查。这里用栈模拟递归
stack.Push(to);
stack.Push(pass);
stack.Push(pass);
stack.Push(from);
}
}
return p;
}执行Floyd()后,map[0,4]的值就是A->E的最小距离。如果值大于等于z,则表示这两点无法连通。GetPath(0,4)方法会返回内容为0, 1, 2, 3, 4的数组,表明从A点出发,途经B、C、D最后到E点。
下面说说该算法的原理:假设A->C的直线距离用map[A,C]表示,那么经过第三点B的A->B->C的距离等于map[A,B]+map[B,C]。
如果 map[A,B]+map[B,C] < map[A,C],那么我们更新map[A,B] = map[A,B]+map[B,C],也就表示此时A->C的直线距离被更新了。同时在path表里也填上path[A,B]=C,表示C点优化了连线AB。
代码中有三重循环,里面的两重循环是用来遍历所有直线路径map[i, j]的,最外面的循环是用来遍历第三点k的,最后使得每条路径都被每个第三点优化过。
接下来我们看A->E的路径优化中先后发生了哪些事情:
1. map[A,C]被中间点B优化了,map[A,C]=map[A,B]+map[B,C]=2,path[A,C]=B
2. map[A,D]被中间点C优化了,map[A,D]=map[A,C]+map[C,D]=3,path[A,D]=C
3. map[A,E]被中间点D优化了,map[A,E]=map[A,D]+map[D,E]=4,path[A,E]=D
最后的结果是:GetDistance(A, E) = 4,GetPath(A, E) = (A,B,C,D,E)。
再看下GetPath的工作流程:
1. 输出起始点A,将(A,E)入栈待查
2. (A,E)出栈,发现path[A,E]=D,将(D,E)和(A,D)入栈待查
3. (A,D)出栈,发现path[A,D]=C,将(C,D)和(A,C)入栈待查
4. (A,C)出栈,发现path[A,C]=B,将(B,C)和(A,B)入栈待查
5. (A,B)出栈,发现path[A,B]=-1,表明A->B无需绕路,输出B
6. (B,C)出栈,发现path[B,C]=-1,表明B->C无需绕路,输出C
7. (C,D)出栈,发现path[C,D]=-1,表明C->D无需绕路,输出D
8. (D,E)出栈,发现path[D,E]=-1,表明D->E无需绕路,输出E
9. 栈空,寻路结束
你可能会发现,这不是递归操作么,其实这里就是用栈模拟的递归。
在优化路径的过程中,优化会在每条路径上不断叠加,最后使得整个邻接矩阵的任意两点间都是最小距离。
而且每当一个点X优化了某条线路P->Q,就记录path[P->Q]=X,每条边都很可能会先后被多个点优化,我们记录最后一个优化它的点就好。
Floyd算法的时间复杂度为O(n^3),三重循环。空间复杂度为O(n^2),二维数组。因为计算量只跟顶点数目有关,所以在稠密连通图中效率要比Dijkstra之流要好很多。
最后给出三个小思考思考,解决了它们才能证明你搞懂了Floyd算法,试试吧:
1. 三重循环中,第三点k的遍历放在最里层会导致什么问题?
2. k的遍历如果是逆向的甚至是乱序的,能不能得到正常结果?
3. 三重循环内的 path[i, j] = k 这一句如果改成 path[i, j] = path[i, j] == -1 ? k : path[i, j] ,即只能赋值一次,GetPath()得到的路径正确吗?















 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









