







1. Shi-Tomasi角点数学原理
1.1 角点的定义
首先通过固定大小的窗口观察图像,然后使窗口按任意方向滑动再次观察图像,比较滑动前后两种情况窗口中的像素灰度变化程度,如果在任意方向上滑动,像素灰度都有较大的变化,那么认为该窗口中存在角点(corner)。
下图给出了三种常见情况:
- flat \text{flat} flat:该窗口在任何方向上滑动,灰度变化程度不大。
- edge \text{edge} edge:该窗口在某个特定方向上滑动,灰度变化程度不大。
- corner \text{corner} corner:该窗口在任何方向上滑动,灰度变化程度明显。

1.2 角点的数学推导
当窗口按
[
u
,
v
]
[u,v]
[u,v]方向进行移动时,滑动前后像素灰度变化程度可用下式表示:
E
(
u
,
v
)
=
∑
x
,
y
w
(
x
,
y
)
[
I
(
x
+
u
,
y
+
v
)
−
I
(
x
,
y
)
]
2
E(u,v)=\sum_{x,y}w(x,y)[I(x+u,y+v)-I(x,y)]^2
E(u,v)=x,y∑w(x,y)[I(x+u,y+v)−I(x,y)]2
其中
w
(
⋅
)
w(\cdot)
w(⋅)表示窗口函数,
I
(
⋅
)
I(\cdot)
I(⋅)表示图像函数。
将
I
(
x
+
u
,
y
+
v
)
I(x+u,y+v)
I(x+u,y+v)利用一阶泰勒展开有:
I
(
x
+
u
,
y
+
v
)
≈
I
(
x
,
y
)
+
I
x
u
+
I
y
v
I(x+u,y+v)\approx I(x,y)+I_xu+I_yv
I(x+u,y+v)≈I(x,y)+Ixu+Iyv
其中
I
x
I_x
Ix和
I
y
I_y
Iy表示沿图像沿
x
x
x和
y
y
y方向的一阶导数,可用
Sobel
\text{Sobel}
Sobel算子计算。
代入泰勒展开则有:
E
(
u
,
v
)
≈
∑
x
,
y
w
(
x
,
y
)
[
I
(
x
,
y
)
+
I
x
u
+
I
y
v
−
I
(
x
,
y
)
]
2
≈
∑
x
,
y
w
(
x
,
y
)
[
I
x
2
u
2
+
2
I
x
I
y
u
v
+
I
y
2
v
2
]
≈
∑
x
,
y
w
(
x
,
y
)
[
u
v
]
[
I
x
2
I
x
I
y
I
x
I
y
I
y
2
]
[
u
v
]
≈
[
u
v
]
∑
x
,
y
w
(
x
,
y
)
[
I
x
2
I
x
I
y
I
x
I
y
I
y
2
]
[
u
v
]
≈
[
u
v
]
[
∑
x
,
y
w
(
x
,
y
)
I
x
2
∑
x
,
y
w
(
x
,
y
)
I
x
I
y
∑
x
,
y
w
(
x
,
y
)
I
x
I
y
∑
x
,
y
w
(
x
,
y
)
I
y
2
]
[
u
v
]
≈
[
u
v
]
M
[
u
v
]
\begin{aligned} E(u,v)&\approx\sum_{x,y}w(x,y)[I(x,y)+I_xu+I_yv-I(x,y)]^2\\ &\approx\sum_{x,y}w(x,y)[I_x^2u^2+2I_xI_yuv+I_y^2v^2]\\ &\approx\sum_{x,y}w(x,y)\begin{bmatrix}u&v\end{bmatrix}\begin{bmatrix}I_x^2&I_xI_y\\I_xI_y&I_y^2\end{bmatrix}\begin{bmatrix}u\\v\end{bmatrix}\\ &\approx\begin{bmatrix}u&v\end{bmatrix}\sum_{x,y}w(x,y)\begin{bmatrix}I_x^2&I_xI_y\\I_xI_y&I_y^2\end{bmatrix}\begin{bmatrix}u\\v\end{bmatrix}\\ &\approx\begin{bmatrix}u&v\end{bmatrix}\begin{bmatrix}\sum_{x,y}w(x,y)I_x^2&\sum_{x,y}w(x,y)I_xI_y\\\sum_{x,y}w(x,y)I_xI_y&\sum_{x,y}w(x,y)I_y^2\end{bmatrix}\begin{bmatrix}u\\v\end{bmatrix}\\ &\approx\begin{bmatrix}u&v\end{bmatrix}M\begin{bmatrix}u\\v\end{bmatrix} \end{aligned}
E(u,v)≈x,y∑w(x,y)[I(x,y)+Ixu+Iyv−I(x,y)]2≈x,y∑w(x,y)[Ix2u2+2IxIyuv+Iy2v2]≈x,y∑w(x,y)[uv][Ix2IxIyIxIyIy2][uv]≈[uv]x,y∑w(x,y)[Ix2IxIyIxIyIy2][uv]≈[uv][∑x,yw(x,y)Ix2∑x,yw(x,y)IxIy∑x,yw(x,y)IxIy∑x,yw(x,y)Iy2][uv]≈[uv]M[uv]
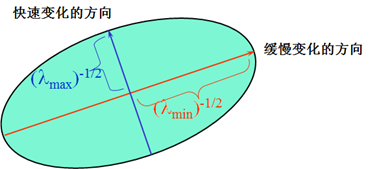
上式右侧的表达式为一个二项式函数,其本质是一个椭圆函数:
A
u
2
+
2
B
u
v
+
C
v
2
=
1
Au^2+2Buv+Cv^2=1
Au2+2Buv+Cv2=1
其中
A
A
A表示
m
11
m_{11}
m11,
B
B
B表示
m
12
=
m
21
m_{12}=m_{21}
m12=m21,
C
C
C表示
m
22
m_{22}
m22。椭圆的扁率和尺寸由
M
M
M的特征值
λ
1
\lambda_1
λ1、
λ
2
\lambda_2
λ2决定,椭圆的方向由
M
M
M的特征矢量决定。
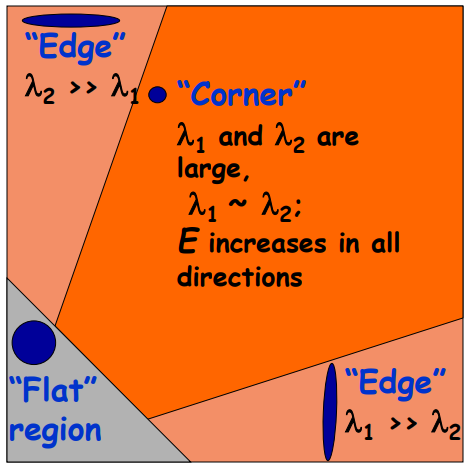
根据上述分析, M M M特征值大小比值可分为三种情况:
- 一个特征值大,另一个特征值小, λ 1 ≫ λ 2 \lambda_1\gg\lambda_2 λ1≫λ2或 λ 2 ≫ λ 1 \lambda_2\gg\lambda_1 λ2≫λ1。说明窗口在某个特定方向上滑动,灰度变化程度不大,在垂直方向上滑动,灰度变化程度明显,可以判断窗口存在** edge \text{edge} edge**。
- 两个特征值都小,且近似相等。说明窗口在任何方向上滑动,灰度变化程度不大,可以判断窗口为 flat \text{flat} flat区域。
- 两个特征值都大,且近似相等。说明窗口在任何方向上滑动,灰度变化程度明显,可以判断窗口存在 corner \text{corner} corner。
1.3 Shi-Tomasi角点的判定
对于 Shi-Tomasi \text{Shi-Tomasi} Shi-Tomasi角点而言,其判定条件不要求两特征值近似相等,仅要求两特征值较小的一个大于特定的阈值。
根据
2
×
2
2\times2
2×2矩阵的特征值推导公式可知,较小的特征值为:
λ
=
(
A
+
C
)
−
(
A
−
C
)
2
+
4
B
2
2
=
(
∑
x
,
y
w
(
x
,
y
)
I
x
2
+
∑
x
,
y
w
(
x
,
y
)
I
y
2
)
−
(
∑
x
,
y
w
(
x
,
y
)
I
x
2
−
∑
x
,
y
w
(
x
,
y
)
I
y
2
)
+
4
(
∑
x
,
y
w
(
x
,
y
)
I
x
I
y
)
2
2
\begin{aligned} \lambda&=\frac{(A+C)-\sqrt{(A-C)^2+4B^2}}{2}\\ &=\frac{(\sum_{x,y}w(x,y)I_x^2+\sum_{x,y}w(x,y)I_y^2)-\sqrt{(\sum_{x,y}w(x,y)I_x^2-\sum_{x,y}w(x,y)I_y^2)+4(\sum_{x,y}w(x,y)I_xI_y)^2}}{2} \end{aligned}
λ=2(A+C)−(A−C)2+4B2=2(∑x,yw(x,y)Ix2+∑x,yw(x,y)Iy2)−(∑x,yw(x,y)Ix2−∑x,yw(x,y)Iy2)+4(∑x,yw(x,y)IxIy)2
2. Shi-Tomasi角点代码解析
在 OpenCV \text{OpenCV} OpenCV中,关于 Shi-Tomasi \text{Shi-Tomasi} Shi-Tomasi算子的核心代码位于 corner.cpp \text{corner.cpp} corner.cpp文件中:
void cv::cornerMinEigenVal( InputArray _src, OutputArray _dst, int blockSize, int ksize, int borderType )
// _src:输入图像
// _dst:输出角点
// blockSize:观察窗尺寸
// ksize:一阶差分算子阶数
// borderType:边缘处理类型
{
CV_INSTRUMENT_REGION();
CV_OCL_RUN(_src.dims() <= 2 && _dst.isUMat(),
ocl_cornerMinEigenValVecs(_src, _dst, blockSize, ksize, 0.0, borderType, MINEIGENVAL))
// OpenCL加速
/*#ifdef HAVE_IPP
int kerSize = (ksize < 0)?3:ksize;
bool isolated = (borderType & BORDER_ISOLATED) != 0;
int borderTypeNI = borderType & ~BORDER_ISOLATED;
#endif
CV_IPP_RUN(((borderTypeNI == BORDER_REPLICATE && (!_src.isSubmatrix() || isolated)) &&
(kerSize == 3 || kerSize == 5) && (blockSize == 3 || blockSize == 5)) && IPP_VERSION_X100 >= 800,
ipp_cornerMinEigenVal( _src, _dst, blockSize, ksize, borderType ));
*/
Mat src = _src.getMat();
_dst.create( src.size(), CV_32FC1 );
Mat dst = _dst.getMat();
cornerEigenValsVecs( src, dst, blockSize, ksize, MINEIGENVAL, 0, borderType );
}
static void
cornerEigenValsVecs( const Mat& src, Mat& eigenv, int block_size,
int aperture_size, int op_type, double k=0.,
int borderType=BORDER_DEFAULT )
// src:输入图像
// eigenv:输出特征根
// block_size:观察窗尺寸
// aperture_size:一阶差分算子阶数
// op_type:操作类型
// k = 0.:Harris 角点系数
// borderType = BORDER_DEFAULT:边缘处理类型
// ktype:算子数据类型
{
#if CV_TRY_AVX
bool haveAvx = CV_CPU_HAS_SUPPORT_AVX;
#endif
int depth = src.depth(); // 输入图像数据类型以及数据位数
double scale = (double)(1 << ((aperture_size > 0 ? aperture_size : 3) - 1)) * block_size;
if( aperture_size < 0 )
scale *= 2.0;
if( depth == CV_8U )
scale *= 255.0;
scale = 1.0/scale;
CV_Assert( src.type() == CV_8UC1 || src.type() == CV_32FC1 );
// 参数检查
Mat Dx, Dy;
if( aperture_size > 0 )
{
Sobel( src, Dx, CV_32F, 1, 0, aperture_size, scale, 0, borderType );
// 生成x方向Sobel滤波结果(一阶差分)
Sobel( src, Dy, CV_32F, 0, 1, aperture_size, scale, 0, borderType );
// 生成y方向Sobel滤波结果(一阶差分)
}
else
{
Scharr( src, Dx, CV_32F, 1, 0, scale, 0, borderType );
Scharr( src, Dy, CV_32F, 0, 1, scale, 0, borderType );
}
Size size = src.size();
Mat cov( size, CV_32FC3 );
int i, j;
for( i = 0; i < size.height; i++ )
{
float* cov_data = cov.ptr<float>(i);
const float* dxdata = Dx.ptr<float>(i);
const float* dydata = Dy.ptr<float>(i);
#if CV_TRY_AVX
if( haveAvx )
j = cornerEigenValsVecsLine_AVX(dxdata, dydata, cov_data, size.width);
else
#endif // CV_TRY_AVX
j = 0;
#if CV_SIMD128
{
for( ; j <= size.width - v_float32x4::nlanes; j += v_float32x4::nlanes )
{
v_float32x4 v_dx = v_load(dxdata + j);
v_float32x4 v_dy = v_load(dydata + j);
v_float32x4 v_dst0, v_dst1, v_dst2;
v_dst0 = v_dx * v_dx;
v_dst1 = v_dx * v_dy;
v_dst2 = v_dy * v_dy;
v_store_interleave(cov_data + j * 3, v_dst0, v_dst1, v_dst2);
}
}
#endif // CV_SIMD128
for( ; j < size.width; j++ )
{
float dx = dxdata[j];
float dy = dydata[j];
cov_data[j*3] = dx*dx; // 卷积结果通道1保存x方向一阶差分平方结果
cov_data[j*3+1] = dx*dy; // 卷积结果通道2保存xy方向一阶差分相乘结果
cov_data[j*3+2] = dy*dy; // 卷积结果通道3保存y方向一阶差分平方结果
}
}
boxFilter(cov, cov, cov.depth(), Size(block_size, block_size),
Point(-1,-1), false, borderType ); // 盒式滤波
// cov:输入图像
// cov:输出图像
// cov.depth():输出图像矩阵类型
// Size(block_size, block_size):核大小
// Point(-1, -1):内核中的锚点位置,默认值 (-1,-1) 表示锚点位于内核中心
// false:是否对核按面积进行归一化
// borderType:边缘处理类型
if( op_type == MINEIGENVAL )
calcMinEigenVal( cov, eigenv ); // 计算最小特征根
else if( op_type == HARRIS )
calcHarris( cov, eigenv, k );
else if( op_type == EIGENVALSVECS )
calcEigenValsVecs( cov, eigenv );
}
static void calcMinEigenVal( const Mat& _cov, Mat& _dst )
// _cov:输入特征图,通道1保存x方向一阶差分平方结果,通道2保存xy方向一阶差分相乘结果,通道3保存y方向一阶差分平方结果
// _dst:输出特征根
{
int i, j;
Size size = _cov.size();
#if CV_TRY_AVX
bool haveAvx = CV_CPU_HAS_SUPPORT_AVX;
#endif
if( _cov.isContinuous() && _dst.isContinuous() ) // 如果_cov及_dst连续存储,则调整size大小以加速以下循环代码
{
size.width *= size.height;
size.height = 1;
}
for( i = 0; i < size.height; i++ )
{
const float* cov = _cov.ptr<float>(i);
float* dst = _dst.ptr<float>(i);
#if CV_TRY_AVX
if( haveAvx )
j = calcMinEigenValLine_AVX(cov, dst, size.width);
else
#endif // CV_TRY_AVX
j = 0;
#if CV_SIMD128
{
v_float32x4 half = v_setall_f32(0.5f);
for( ; j <= size.width - v_float32x4::nlanes; j += v_float32x4::nlanes )
{
v_float32x4 v_a, v_b, v_c, v_t;
v_load_deinterleave(cov + j*3, v_a, v_b, v_c);
v_a *= half;
v_c *= half;
v_t = v_a - v_c;
v_t = v_muladd(v_b, v_b, (v_t * v_t));
v_store(dst + j, (v_a + v_c) - v_sqrt(v_t));
}
}
#endif // CV_SIMD128
for( ; j < size.width; j++ )
{
float a = cov[j*3]*0.5f;
float b = cov[j*3+1];
float c = cov[j*3+2]*0.5f;
dst[j] = (float)((a + c) - std::sqrt((a - c)*(a - c) + b*b));
// 求较小特征值
}
}
}















 3675
3675

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









