







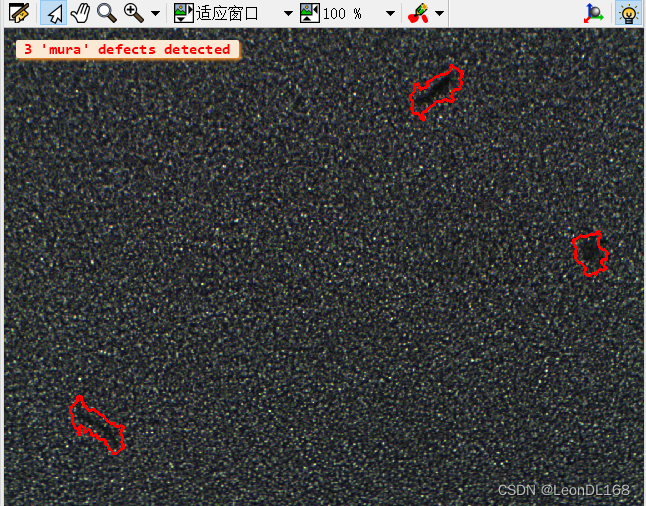
由于磨砂表面粗糙(噪点很多,影响二值化) 因此该例程使用了频域高斯滤波差分后,在空间域的blob分析用了分水岭域分割滤波后的图像,计算每个区域灰度共生矩阵,通过能量筛选缺陷。
dev_close_window ()
dev_update_off ()
read_image (Image, ‘D:/1.png’)
get_image_size (Image, Width, Height)
dev_open_window (0, 0, 640, 480, ‘black’, WindowHandle)
set_display_font (WindowHandle, 14, ‘mono’, ‘true’, ‘false’)
dev_set_draw (‘margin’)
dev_set_line_width (3)
dev_set_color (‘red’)
decompose3 (Image, R, G, B)
fft_generic (B, ImageFFT, ‘to_freq’, -1, ‘sqrt’, ‘dc_center’, ‘complex’)
gen_gauss_filter (ImageGauss, 50, 50, 0, ‘none’, ‘dc_center’, Width, Height)
convol_fft (ImageFFT, ImageGauss, ImageConvol)
fft_generic (ImageConvol, ImageBackground, ‘from_freq’, 1, ‘sqrt’, ‘dc_center’, ‘byte’)
- 图像减去背景,增加特征与背景对比度
sub_image (B, ImageBackground, ImageSub, 2, 100) - 中值滤波,为分水岭域做准备
median_image (ImageSub, ImageMedian, ‘circle’, 9, ‘mirrored’)
watersheds_threshold (ImageMedian, Basins, 20) - 缺陷部分是黑色的,灰度值小能量就小,所以根据能量可以将缺陷的区域筛选出来
cooc_feature_image (Basins, ImageMedian, 6, 0, Energy, Correlation, Homogeneity, Contrast)
Mask := Energy [<=] 0.05
select_mask_obj (Basins, Defects, Mask)
dev_display (Image)
dev_display (Defects)
count_obj (Defects, NDefects)
disp_message (WindowHandle, NDefects + ’ ‘mura’ defects detected’, ‘window’, 12, 12, ‘red’, ‘true’)
🙄 相关API参数:
cooc_feature_image(计算图像的灰度共生矩阵)
cooc_feature_image(Regions, Image ,LdGray, Direction ,Energy, Correlation, Homogeneity, Contrast)
参数列表:
Regions(in) //要检查的区域。
Image (in) //灰度图像。
LdGray(in) //要区分的灰度值的数量。(默认6)
Direction (in) //矩阵的计算方向(‘0’,‘45’,‘90’,‘130’,'mean‘)
Energy(out) //能量
Correlation(out)//相关性
Homogeneity(out) //局部均匀性(熵)
Contrast(out) //对比度(反差)
输出参数详解:
能量(Energy):是对图像纹理的灰度变化稳定程度的度量,反应了图像灰度分布均匀程度和纹理粗细度。能量越大,表示灰度变化比较稳定,反映了纹理变化的均匀程度。。对于灰度图来说,能量低说明灰度值低,对于彩色图来说,能量低说明光强低。
相关性(Correlation):表示纹理在行或者列方向的相似程度。相关性越大,相似性越高。
(熵)局部均匀性(Homogeneity):反映图像局部纹理的变化量(即复杂程度),熵值越大图像越复杂。
(反差)对比度(Contrast):表示矩阵的值的差异程度,也间接表现了图像的局部灰度变化幅度。反差值越大,图像中的纹理深浅越明显,表示图像越清晰;反之,则表示图像越模糊。
watersheds_threshold(阈值分水岭图像分割)
watersheds_threshold(Image ,Basins ,Threshold )
参数列表:
Image(in)//输入图像(最好先用中值滤波处理)
Basins(out)//输出二值图像(盆地)
Threshold(in)//阈值
算子描述:
第一步:计算出分水岭(不使用该参数Threshold ),分割的盆地和调用算子watersheds得到的盆地是相同的
第二步:如果被一个分水岭分割的相邻盆地与对应分水岭的高度差小于Threshold ,盆地依次合并。假设B1和B2分别是两个相邻盆地的最小灰度值,W是盆地对应分水岭的最小灰度值。当满足以下条件时,两个盆地合并:max{W-B1,W-B2}<Threshold 。由此得到的盆地存储在Basins 变量中。















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









