









目录
2、非线性ARX(IDNLARX)模型-使用Wavenet(小波网络)的初步估计
前言
本文出自 MATLAB2018A 的系统辨识 System Identification APP 中的 Example,因为自己在做这方面的课题,所以把这个例子简单做一下,包括翻译(Google 翻译,修改了部分问题)和自己的理解。
这个例子主要是用数据估计一种 MIMO 非线性黑盒系统的模型,工具箱提供了两种类型的非线性黑盒模型:NARX,Hammerstein-Wiener模型
1、输入输出的数据(测量数据序列)
在此示例中将使用文件 'motorizedcamera.mat' 中保存的数据。 它包含从电动相机收集的188个数据样本,采样时间为0.02秒。 输入向量 u(t)由6个变量组成:固定在摄像机上的正交X-Y-Z坐标系中的3个平移速度分量[m / s],以及绕X-Y-Z轴[rad / s]的3个旋转速度分量。 输出向量y(t)包含2个变量:点的位置(以像素为单位),该点是摄像机在3D空间中固定点拍摄的图像。 我们创建一个IDDATA对象 z 来保存加载的数据:
黑盒系统辨识最初始的东西就是数据。这个例子的数据来自于一个电动相机的数据,可以理解为控制6个输入量(6输入)的组合来达到要求的2个目标(2输出)。
load motorizedcamera % 加载例子中的数据(内置)
z = iddata(y, u, 0.02, 'Name', 'Motorized Camera', 'TimeUnit', 's'); %创建一个iddata对象来看一下运行情况:
可以知道,输入 u(t) 是一个188行,6列的矩阵,每一列代表一个输入变量的采样序列;同样的,y(t) 是188行,2列,每一列代表一个输出采样序列。以上就是我们所需要的数据,一般是从实验得到的。
2、非线性ARX(IDNLARX)模型-使用Wavenet(小波网络)的初步估计
让我们首先尝试非线性ARX模型。 需要选择两个重要元素:模型阶数和非线性估计量。 首先尝试简单的事情,让我们选择顺序[na nb nk] = [ones(2,2),ones(2,6),ones(2,6)]。 这意味着每个输出变量都由所有输出和输入变量预测,每个变量都延迟了1个样本。 通过使用矢量符号,可以以 model_output(t)= F(y(t-1),u(t-1))的形式编写模型。 让我们选择小波网络(wavenet)作为非线性估计器,从而矢量非线性函数F将由两个小波网络估计。 MATLAB的函数 nlarx 有助于估计非线性ARX模型。
小波的方法通常用于多分辨率的分析(详细请自行了解)。
mw1 = nlarx(z, [ones(2,2), ones(2,6), ones(2,6)], wavenet);通过将模拟输出与估计模型的输出与测量数据z中的输出进行比较,检查结果:
compare(z,mw1)结果:
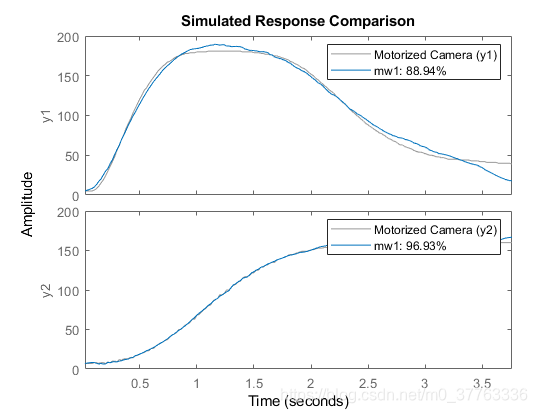
结果就是使用小波网络时的非线性自回归的辨识效果,两个图分别表示两个输出的结果;每一幅图中的两条曲线分别表示原始系统的输出和采用了NARX辨识后的输出曲线。这里面并没有表现出与输入之间的关系,只是这种辨识的想过说明。这里面小波网络的方式只是 nlarx 函数的一个参数,它还有一些其他的参数方法,可以自行查询help。
3、非线性ARX模型-尝试更高阶
让我们看看能否通过更高的阶次做得更好。 请注意,在使用基函数展开表示非线性来辨识模型时,模型参数的数量可能会超过数据样本的数量。 在这种情况下,某些估计指标(例如噪声方差和最终预测误差(FPE))无法可靠地计算。 对于当前示例,我们将关闭警告以告知我们有关此限制的信息。
ws = warning('off','Ident:estimation:NparGTNsamp'); % 关闭警告
mw2 = nlarx(z, [ones(2,2), 2*ones(2,6), ones(2,6)], wavenet); % nb 参数乘2
compare(z,mw2)结果
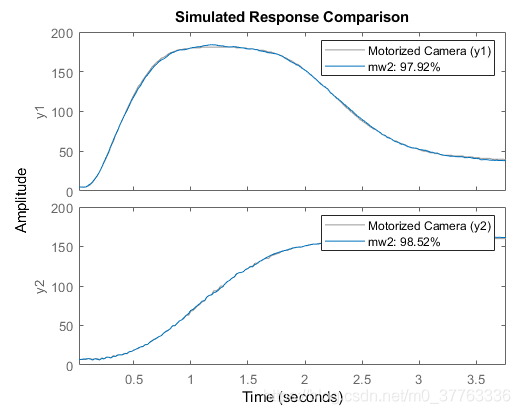
第二个模型mw2很好。 因此,让我们在以下示例中保留对模型阶次的选择:
nanbnk = [ones(2,2), 2*ones(2,6), ones(2,6)];估计算法已自动选择了两个小波网络估计器的单位数(子波)。 这些数字显示在下面。 注意缩写“ nl” =“Nonlinearity”和“ num” =“ NumberOfUnits”。
mw2.Nonlinearity(1).NumberOfUnits % 属性的全称Nonlinearity,NumberOfUnits
mw2.nl(2).num % MATLAB中可以使用的属性缩写 nl,num
非线性ARX模型-调整非线性估计量的单位数
可以显式指定WAVENET估计器中的单位数,而不是由估计算法自动选择:
mw3 = nlarx(z, nanbnk, [wavenet('num',10); wavenet('num',5)]); % 在选择方法时设置参数4、非线性ARX模型-尝试其他非线性估计器
在WAVENET估计器的位置,也可以使用其他非线性估计器。 让我们尝试TREEPARTITION估算器。
mt1 = nlarx(z, nanbnk, 'treepartition');在上面的调用中,我们使用字符向量(“ treepartition”)代替对象来指定非线性估计量。 但是,这仅在将非线性与默认属性值一起使用时才有效。 在以下示例中,调用树分区对象构造函数以直接创建非线性估计器对象。
mt2 = nlarx(z, nanbnk, treepartition);也可以使用SIGMOIDNET估计器。 可以使用NLARXOPTIONS命令指定诸如最大迭代(MaxIterations)和迭代显示之类的估计选项。
opt = nlarxOptions('Display','on');
opt.SearchOptions.MaxIterations = 2;
ms1 = nlarx(z, nanbnk, 'sigmoidnet', opt);5、具有混合非线性估计量的非线性ARX模型
在同一模型中的不同输出通道上可以使用不同的非线性估计器。 假设我们要使用树分区非线性估计器来预测第一输出,并使用小波网络来预测第二输出。 模型估计如下所示。 现在,第三个输入参数(非线性)是两个不同的非线性估计器对象的数组。
mtw = nlarx(z, nanbnk, [treepartition; wavenet]);可以通过选择LINEAR估计器来指示输出通道中是否没有非线性。 以下示例表示,在model_output(t)= F(y(t-1),u(t-1),u(t-2))中,函数F由线性分量和非线性分量组成( SIGMOIDNET)。
opt.Display = 'off'; % do not show estimation progress anymore
mls = nlarx(z, nanbnk, [linear; sigmoidnet('NumberOfUnits',5)], opt);
% no nonlinearity on first output检查估计结果
可以在同一COMPARE命令中比较各种模型。
compare(z, mw2, ms1, mls)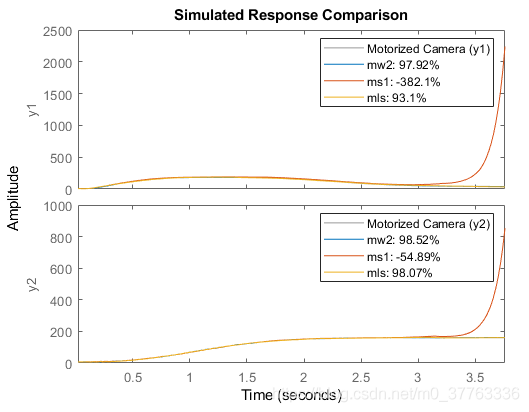
函数PLOT可用于查看各种模型的非线性响应。
plot(mt1,mtw,ms1,mls)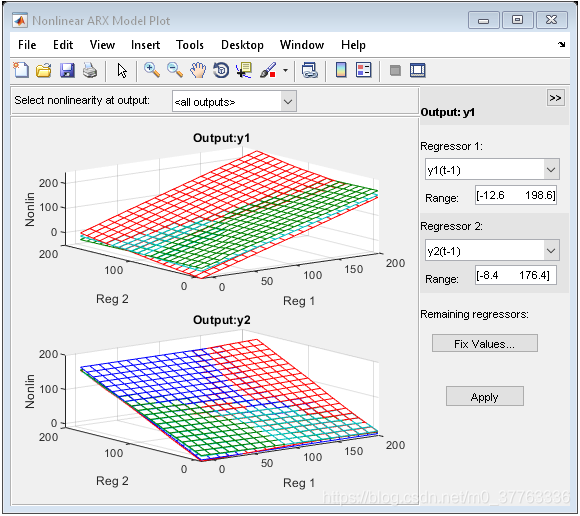
请注意,曲线图右侧的控制面板允许选择回归器和进行配置。
可以使用与线性模型相同的方法,在估计的模型上使用其他功能,例如RESID,PREDICT和PE。
















 7592
7592











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











