







 本文深入探讨数值分析中的关键算法,包括方程求根的二分法与Newton法,以及常微分方程的Euler方法和Runge-Kutta法。通过对这些方法的原理和Julia代码实现的详细解析,读者可以掌握数值计算的基本技巧。
本文深入探讨数值分析中的关键算法,包括方程求根的二分法与Newton法,以及常微分方程的Euler方法和Runge-Kutta法。通过对这些方法的原理和Julia代码实现的详细解析,读者可以掌握数值计算的基本技巧。
方程求根
二分法
对于方程 f ( x ) = 0 f(x)=0 f(x)=0,如果 f ( a ) ⋅ f ( b ) < 0 f(a)\cdot f(b)<0 f(a)⋅f(b)<0,则说明 a , b a,b a,b之间必有根,如果按照某个步长对其进行搜索,那么最终一定能够不断缩小根的取值范围,不断精确化。
二分法就是基于这种思想的一种算法,其实质是对区间进行快速选取。如果已知 f ( a ) ⋅ f ( b ) < 0 f(a)\cdot f(b)<0 f(a)⋅f(b)<0,则快速选取 c = a + b 2 c=\frac{a+b}{2} c=2a+b,如果 f ( a ) ⋅ f ( c ) < 0 f(a)\cdot f(c)<0 f(a)⋅f(c)<0,则说明根在 ( a , c ) (a,c) (a,c)之间,否则即说明根在 ( a , b ) (a,b) (a,b)之间,然后不断第迭代下去。
# equations.jl
# 二分法求根,f为函数,err为误差
# 要求f(a)*f(b)<0
function Dichotomy(f,a,b,err)
c = (a+b)/2
val = f(c)
#如果f(c)和f(a)异号,则将c赋值给b,否则将c赋值给a
val*f(a)<0 ? b=c : a=c
#如果大于误差,则继续二分,否则输出c
return abs(val)>err ? Dichotomy(f,a,b,err) : c
end
验证
julia> include("equations.jl");
julia> f(x) = x^5+x^4+x^2+1;
julia> x = Dichotomy(f,-2,1,0.01);
julia> f(x)
0.009531426464285175
Newton法
如果 f ( x ) f(x) f(x)=0可以写成 x = φ ( x ) x=\varphi(x) x=φ(x)的形式,则可以将这个方程的根理解为 y = φ ( x ) y=\varphi(x) y=φ(x)与 y = x y=x y=x的交点。现给定一个初值 x 0 x_0 x0,将其代入 φ ( x ) \varphi(x) φ(x)中,则 φ ( x 0 ) \varphi(x_0) φ(x0)对应一个新的 x x x,记为 x 1 x_1 x1。
如果数列 { x n } \{x_n\} {xn}收敛,那么必有 x = lim k → ∞ x k x=\lim_{k\to\infty}x_k x=limk→∞xk即为方程的根。所以,问题的关键在构造合适的 φ ( x ) \varphi(x) φ(x)使得数列能够快速收敛。
其最简单的形式莫过于 x k + 1 = x k + f ( x k ) x_{k+1}=x_k+f(x_k) xk+1=xk+f(xk),不过这种迭代公式看起来十分危险,如果$f(x_k)是一个大于0的单调递增函数,那么结果就爆炸了。
所以,最好为 f ( x k ) f(x_k) f(xk)乘以一个系数,当 f ( x k ) f(x_k) f(xk)增加时使之变小,当其递减时使之变大。所以一个比较好的形式为
x k + 1 = x k − f ( x k ) f ′ ( x k ) x_{k+1}=x_k-\frac{f(x_k)}{f'(x_k)} xk+1=xk−f′(xk)f(xk)
此即Newton公式。
除了迭代形式,Newton公式也可以作为二分法的一个升级版本, x k − f ( x k ) f ′ ( x k ) x_k-\frac{f(x_k)}{f'(x_k)} xk−f′(xk)f(xk)可以表示过 ( x k , f ( x k ) ) (x_k,f(x_k)) (xk,f(xk))做切线与 x x x轴的交点,通过切线选取新的 x x x值取代了二分法的盲动性。
其Julia实现为
# Newton法
# f为函数,x为初始值,err为误差
function Newton(f,x,err)
fx = f(x)
df = (fx-f(x-err))/err #近似斜率
xNew = x-fx/df
# 如果满足精度要求则返回,否则继续迭代
return abs(xNew-x) > err ? Newton(f,xNew,err) : xNew
end
验证
julia> include("equations.jl");
julia> f(x) = x^5+x^4+x^2+1;
julia> x = Newton(f,1,0.01);
julia> f(x)
-0.0028617855019934524
常微分方程
Euler方法
一阶常微分方程的一般形式为
{ d y d x = f ( x , y ) → d y = f ( x , y ) d x y ( x 0 ) = y 0 \left\{\begin{aligned} \frac{\text{d}y}{\text{d}x}=& f(x,y) \to \text{d}y=f(x,y)\text{d}x\\ y(x_0)=&y_0 \end{aligned}\right. ⎩⎨⎧dxdy=y(x0)=f(x,y)→dy=f(x,y)dxy0
如果将 x x x划分为一系列子区间,其端点序列为 x 0 , x 1 , … , x n x_0,x_1,\ldots,x_n x0,x1,…,xn,则上式可写为
d y n = f ( x n , y n ) d x n → y n + 1 = y n + f ( x n , y n ) d x n \begin{aligned} \text{d}y_n=&f(x_n,y_n)\text{d}x_n\\ \to y_{n+1}=&y_n+f(x_n,y_n)\text{d}x_n \end{aligned} dyn=→yn+1=f(xn,yn)dxnyn+f(xn,yn)dxn
此即 Euler公式 \textbf{Euler公式} Euler公式,记 f n = f ( x n , y n ) , h = d x n f_n=f(x_n,y_n),h=dx_n fn=f(xn,yn),h=dxn,则可更加简洁地写为
y n + 1 = y n + f n h y_{n+1}=y_n+f_nh yn+1=yn+fnh
在已知初值的情况下,可以递推地计算出此后的函数值。
# Euler法
# f为dy/dx=f(x,y), x为输入区间,n为步长
function Euler(f,x,y0,n)
h = (x[2]-x[1])/n
x = [x[1]+i*h for i in 1:n]
y = zeros(n)
y[1] = y0
for i in 2:n
y[i] = y[i-1]+h*f(x[i],y[i-1])
end
return y
end
验证
julia> include("equations.jl")
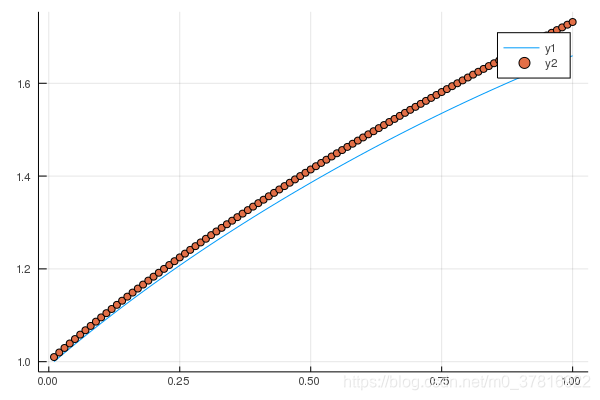
julia> f(x,y) = y-2*x/y #导函数
julia> Y(x) = sqrt(1+2*x) #原函数
julia> x = [0,1] #区间
julia> y0 = 1
julia> yEuler = Euler(f,x,y0,100);
julia> X = [i for i in 0.01:0.01:1]
julia> yReal = Y.(X)
julia> using Plots
julia> plot(X,[yEuler,yReal],st=[:line :scatter])
julia> savefig("naiveEuler.png")
如果对于[0,1]区间,我们给的初值为 y ( 1 ) = y 1 y(1)=y_1 y(1)=y1,那么其求解过程将变成从后向前的运算,公式 y n + 1 = y n + f ( x n , y n ) d x n y_{n+1}=y_n+f(x_n,y_n)\text{d}x_n yn+1=yn+f(xn,yn)dxn也将从显式变成隐式,因为此时的 y n y_n yn将是一个未知量。
这种隐式的Euler公式即为Euler公式的后退格式,如果想要将其改为从前向后的计算风格,即可写为
y n + 1 = y n + f ( x n + 1 , y n + 1 ) d x n y_{n+1}=y_n+f(x_{n+1},y_{n+1})\text{d}x_n yn+1=yn+f(xn+1,yn+1)dxn
如果同时考虑前向格式和后向格式,那么可以将二者综合为
y n + 1 = y n + ( f n + f n + 1 ) h 2 y_{n+1}=y_n+(f_n+f_{n+1})\frac{h}{2} yn+1=yn+(fn+fn+1)2h
此即Euler公式的梯形格式,这仍然是一个隐式,所以需要对其进行迭代求值,在给定初值的情况下,有
{ y n + 1 ( 0 ) = y n + h f ( x n , y n ) y n + 1 ( k + 1 ) = y n + h 2 [ f ( x n , y n ) + f ( x n + 1 , y n + 1 ( k ) ) ] \left\{\begin{aligned} y_{n+1}^{(0)}=&y_n+hf(x_n,y_n)\\ y_{n+1}^{(k+1)}=&y_n+\frac{h}{2}[f(x_n,y_n)+f(x_{n+1},y_{n+1}^{(k)})] \end{aligned}\right. ⎩⎪⎨⎪⎧yn+1(0)=yn+1(k+1)=yn+hf(xn,yn)yn+2h[f(xn,yn)+f(xn+1,yn+1(k))]
这个算法在处理每个点时,都需要进行大量的迭代,开销很大,但实现过程并不复杂,只需对原始的Euler公式稍加改进即可
# Euler法
# f为dy/dx=f(x,y), x为输入区间,n为步长
# nIter 为梯形格式的迭代次数
function Euler(f,x,y0,n,nIter)
h = (x[2]-x[1])/n
x = [x[1]+i*h for i in 1:n]
y = zeros(n)
y[1] = y0
for i in 2:n
y[i] = y[i-1]+h*f(x[i],y[i-1])
for j in 1:nIter
y[i] = y[i-1]+h*f(x[i],y[i])
end
end
return y
end
当迭代次数为1时,被特别称为改进的Euler法。
{ y t e s t = y n + h f ( x n , y n ) y n + 1 = y n + h 2 [ f ( x n , y n ) + f ( x n + 1 , y t e s t ) ] \left\{\begin{aligned} y_{test}=&y_n+hf(x_n,y_n)\\ y_{n+1}=&y_n+\frac{h}{2}[f(x_n,y_n)+f(x_{n+1},y_{test})] \end{aligned}\right. ⎩⎨⎧ytest=yn+1=yn+hf(xn,yn)yn+2h[f(xn,yn)+f(xn+1,ytest)]
Runge-kutta法
Runge-Kutta法是一种高精度的单步法,其根源是 T y l o r Tylor Tylor公式:
y ( x n + 1 ) = y ( x n ) + h y ′ ( x n ) + h 2 2 ! y ′ ′ ( x n ) + h 3 3 ! y ′ ′ ( x n ) + … y(x_{n+1})=y(x_n)+hy'(x_n)+\frac{h^2}{2!}y''(x_n)+\frac{h^3}{3!}y''(x_n)+\ldots y(xn+1)=y(xn)+hy′(xn)+2!h2y′′(xn)+3!h3y′′(xn)+…
其中导数之间存在递推关系
{ y ′ = f , y ′ ′ = ∂ f ∂ x + f ∂ f ∂ y y ′ ′ ′ = ∂ 2 f ∂ x 2 + 2 f ∂ 2 f ∂ x ∂ y + f 2 ∂ 2 f ∂ y 2 + ∂ f ∂ y ( ∂ f ∂ x + ∂ f ∂ y ) ⋮ \left\{\begin{aligned} y'=&f,\\ y''=&\frac{\partial f}{\partial x}+f\frac{\partial f}{\partial y}\\ y'''=&\frac{\partial^2f}{\partial x^2}+2f\frac{\partial^2f}{\partial x\partial y}+f^2\frac{\partial^2f}{\partial y^2}+\frac{\partial f}{\partial y}(\frac{\partial f}{\partial x}+\frac{\partial f}{\partial y})\\ \vdots \end{aligned}\right. ⎩⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎧y′=y′′=y′′′=⋮f,∂x∂f+f∂y∂f∂x2∂2f+2f∂x∂y∂2f+f2∂y2∂2f+∂y∂f(∂x∂f+∂y∂f)
Euler法截取了一阶Taylor公式作为拟合方程,如果提高Taylor格式的阶数,将有助于计算结果精度的提高。
现假设有一点 p ∈ ( x n , x n + 1 ) p\in(x_n,x_{n+1}) p∈(xn,xn+1),且 x p = x n + p h , p ⩽ 1 , h = x n + 1 − x n x_p=x_n+ph,\quad p\leqslant1,h=x_{n+1}-x_n xp=xn+ph,p⩽1,h=xn+1−xn。设 x n , x n + 1 x_n,x_{n+1} xn,xn+1点的斜率分别为 K 1 , K 2 K_1,K_2 K1,K2,则 y n + 1 − y n h \frac{y_{n+1}-y_n}{h} hyn+1−yn可以表示为 K 1 , K 2 K_1,K_2 K1,K2的线性组合,即
y n + 1 = y n + h ( λ 1 K 1 + λ 2 K 2 ) y_{n+1}=y_n+h(\lambda_1K_1+\lambda_2K_2) yn+1=yn+h(λ1K1+λ2K2)
由于 x n x_n xn点是暴露给我们的,我们可以设 K 1 = f ( x n , y n ) K_1=f(x_n,y_n) K1=f(xn,yn),并且通过 K 1 K_1 K1来估测 x p x_p xp处的值,即 x p x_p xp处的函数值为 F ( x p ) = y n + K 1 p h F(x_p)=y_n+K_1ph F(xp)=yn+K1ph,从而可以得到 K 2 = f ( x p , y n + K 1 p h ) K_2=f(x_p,y_n+K_1ph) K2=f(xp,yn+K1ph)。
对 K 2 K_2 K2进行展开可以得到
K 2 = f ( x n + p h , y n + p h K 1 ) = f ( x n , y n ) + ∂ f ∂ x d x + ∂ f ∂ y d y = f ( x n , y n ) + f x ( x n , y n ) p h + f y ( x n , y n ) p h K 1 ⇒ K 1 = f ( x n , y n ) f ( x n , y n ) + p h ( f x ( x n , y n ) + f y ( x n , y n ) f ( x n , y n ) \begin{aligned} K_2 =& f(x_n+ph,y_n+phK_1)=f(x_n,y_n)+\frac{\partial f}{\partial x}\text{d}x+\frac{\partial f}{\partial y}\text{d}y\\ =&f(x_n,y_n)+f_x(x_n,y_n)ph+f_y(x_n,y_n)phK_1\\ \xRightarrow{K_1 = f(x_n,y_n)}&f(x_n,y_n)+ph(f_x(x_n,y_n)+f_y(x_n,y_n)f(x_n,y_n) \end{aligned} K2==K1=f(xn,yn)f(xn+ph,yn+phK1)=f(xn,yn)+∂x∂fdx+∂y∂fdyf(xn,yn)+fx(xn,yn)ph+fy(xn,yn)phK1f(xn,yn)+ph(fx(xn,yn)+fy(xn,yn)f(xn,yn)
这正与Taylor展开式有相同的形式,将 K 1 , K 2 K_1,K_2 K1,K2代入 y n + 1 = y n + h ( λ 1 K 1 + λ 2 K 2 ) y_{n+1}=y_n+h(\lambda_1K_1+\lambda_2K_2) yn+1=yn+h(λ1K1+λ2K2),则可得到
{ λ 1 + λ 2 = 1 λ 2 p = 1 2 \left\{\begin{aligned} \lambda_1+\lambda_2=1\\ \lambda_2p=\frac{1}{2} \end{aligned}\right. ⎩⎨⎧λ1+λ2=1λ2p=21
在此条件下,可整理得出二阶Runge-Kutta的表达形式
{ y n + 1 = y n + h ( λ 1 K 1 + λ 2 K 2 ) K 1 = f ( x n , y n ) K 2 = f ( x p , y n + p h K 1 ) \left\{\begin{aligned} y_{n+1}=&y_n+h(\lambda_1K_1+\lambda_2K_2)\\ K_1=&f(x_n,y_n)\\ K_2=&f(x_p,y_n+phK_1)\\ \end{aligned}\right. ⎩⎪⎨⎪⎧yn+1=K1=K2=yn+h(λ1K1+λ2K2)f(xn,yn)f(xp,yn+phK1)
通过Julia写为
# Runge-Kutta法,p取1/2
# f为dy/dx=f(x,y), x为输入区间[x1,x2],n为步长
function RungeKutta(f,x,y0,n)
h=(x[2]-x[1])/n
x = [x[1]+i*h for i in 1:n]
y = zeros(n)
y[1] = y0
for i in 2:n
K1 = f(x[i-1],y[i-1])
K2 = f(x[i-1]+h/2,y[i-1]+h*K1/2)
y[i] = y[i-1]+h*K2
end
return y
end
验证其验证过程与Euler法完全相同,甚至连保存的图片都几乎一致,只需把Euler函数换为RungeKutta即可。
结合Taylor公式可知,二阶Runge-Kutta法绝非优化的极限,我们可以通过进一步增加参数,来拟合Taylor公式中的高阶项,于是有了更高阶的Runge-Kutta法。
由
y ′ ′ ′ = ∂ 2 f ∂ x 2 + 2 f ∂ 2 f ∂ x ∂ y + f 2 ∂ 2 f ∂ y 2 + ∂ f ∂ y ( ∂ f ∂ x + ∂ f ∂ y ) y'''=\frac{\partial^2f}{\partial x^2}+2f\frac{\partial^2f}{\partial x\partial y}+f^2\frac{\partial^2f}{\partial y^2}+\frac{\partial f}{\partial y}(\frac{\partial f}{\partial x}+\frac{\partial f}{\partial y}) y′′′=∂x2∂2f+2f∂x∂y∂2f+f2∂y2∂2f+∂y∂f(∂x∂f+∂y∂f)
若三阶Runge-Kutta项的形式为
y n + 1 = y n + h ( λ 1 K 1 + λ 2 K 2 + λ 3 K 3 ) K 1 = f ( x n , y n ) K 2 = f ( x p , y n + p h K 1 ) K 3 = f ( x n + q h , y n + q h ( r K 1 + s K 2 ) ) \begin{aligned} y_{n+1}=&y_n+h(\lambda_1K_1+\lambda_2K_2+\lambda_3K_3)\\ K_1=&f(x_n,y_n)\\ K_2=&f(x_p,y_n+phK_1)\\ K_3=&f(x_n+qh,y_n+qh(rK_1+sK_2)) \end{aligned} yn+1=K1=K2=K3=yn+h(λ1K1+λ2K2+λ3K3)f(xn,yn)f(xp,yn+phK1)f(xn+qh,yn+qh(rK1+sK2))
则可推导出各参数所需要满足的条件
{ λ 2 p + λ 3 p = 1 2 λ 2 p 2 + λ 3 q 2 = 1 3 λ 3 p q s = 1 6 \left\{\begin{aligned} \lambda_2p+\lambda_3p=\frac{1}{2}\\ \lambda_2p^2+\lambda_3q^2=\frac{1}{3}\\ \lambda_3pqs=\frac{1}{6} \end{aligned}\right. ⎩⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎧λ2p+λ3p=21λ2p2+λ3q2=31λ3pqs=61
故可选取
y
n
+
1
=
y
n
+
h
6
(
K
1
+
4
K
2
+
K
3
)
K
1
=
f
(
x
n
,
y
n
)
K
2
=
f
(
x
n
+
h
2
,
y
n
+
h
2
K
1
)
K
3
=
f
(
x
n
+
h
,
y
n
−
h
K
1
+
2
h
K
2
)
\begin{aligned} y_{n+1}=&y_n+\frac{h}{6}(K_1+4K_2+K_3)\\ K_1=&f(x_n,y_n)\\ K_2=&f(x_n+\frac{h}{2},y_n+\frac{h}{2}K_1)\\ K_3=&f(x_n+h,y_n-hK_1+2hK_2) \end{aligned}
yn+1=K1=K2=K3=yn+6h(K1+4K2+K3)f(xn,yn)f(xn+2h,yn+2hK1)f(xn+h,yn−hK1+2hK2)
四阶Runge-Kutta亦然,其比较常用的形式为
y n + 1 = y n + h 6 ( K 1 + 2 K 2 + 2 K 3 + K 4 ) K 1 = f ( x n , y n ) K 2 = f ( x n + h 2 , y n + h 2 K 1 ) K 3 = f ( x n + h 2 , y n + h 2 K 2 ) K 3 = f ( x n + h , y n + h K 2 ) \begin{aligned} y_{n+1}=&y_n+\frac{h}{6}(K_1+2K_2+2K_3+K_4)\\ K_1=&f(x_n,y_n)\\ K_2=&f(x_n+\frac{h}{2},y_n+\frac{h}{2}K_1)\\ K_3=&f(x_n+\frac{h}{2},y_n+\frac{h}{2}K_2)\\ K_3=&f(x_n+h,y_n+hK_2) \end{aligned} yn+1=K1=K2=K3=K3=yn+6h(K1+2K2+2K3+K4)f(xn,yn)f(xn+2h,yn+2hK1)f(xn+2h,yn+2hK2)f(xn+h,yn+hK2)
# Runge-Kutta法
# f为dy/dx=f(x,y), x为输入区间[x1,x2],n为步长
# deg为阶数,支持2,3,4阶
# 二阶需要输入参数p,lmd1,lmd2;三阶需要额外输入q,r,s,lmd3
# 四阶需要另输入a,b,c,d,lmd4
function RungeKutta(f,x,y0,n;deg=2;kwargs...)
h=(x[2]-x[1])/n
x = [x[1]+i*h for i in 1:n]
y = zeros(n)
y[1] = y0
# 初始化参数
if deg == 2
p,lmd1,lmd2 = isempty(kwargs) ? [1/2,1/2,1/2] : [
kwargs[:p],kwargs[:lmd1],kwargs[:lmd2]]
elseif deg == 3
p,q,r,s,lmd1,lmd2,lmd3 = isempty(kwargs) ? [
1/2,1,-1,2,1/6,2/3,1/6] : [kwargs[:p],
kwargs[:q],kwargs[:r],kwargs[:s],
kwargs[:lmd1],kwargs[:lmd2],kwargs[:lmd3]]
elseif deg == 4
p,q,r,s,a,b,c,d,lmd1,lmd2,lmd3 = isempty(kwargs) ? [
1/2,1/2,0,0,1,0,1,0,1/6,1/3,1/3,1/6] : [
kwargs[:p],kwargs[:q],kwargs[:r],kwargs[:s],
kwargs[:a],kwargs[:b],kwargs[:c],kwargs[:d],
kwargs[:lmd1],kwargs[:lmd2],kwargs[:lmd3],kwargs[:lmd4]]
end
for i in 2:n
K1 = f(x[i-1],y[i-1])
K = K1
if deg>1
K2 = f(x[i-1]+p*h,y[i-1]+p*h*K1) #参数p
K = lmd1*K1+lmd2*K2
end
if deg>2
K3 = f(x[i-1]+q*h,y[i-1]+q*h*(r*K1+s*K2))#参数q,r,s
K += lmd3 #参数lmd3
end
if deg>3
K4 = f(x[i-1]+a*h,y[i-1]+a*h*(b*K1+c*K2+d*K3))
K += lmd4
end
y[i] = y[i-1]+h*K
end
return y
end


















 1660
1660

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











