







一、 传统目标检测方法
传统目标检测流程:
1)区域选择(穷举策略:采用滑动窗口,且设置不同的大小,不同的长宽比对图像进行遍历,时间复杂度高)
2)特征提取(SIFT、HOG等;形态多样性、光照变化多样性、背景多样性使得特征鲁棒性差)
3)分类器(主要有SVM、Adaboost等)
传统目标检测的主要问题:
1)基于滑动窗口的区域选择策略没有针对性,时间复杂度高,窗口冗余
2)手工设计的特征对于多样性的变化没有很好的鲁棒性。
二、目标检测技术近年来的发展
1.使用region proposal的,目前是主流,比如RCNN、SPP-Net、Fast-RCNN、Faster-RCNN以及MSRA的R-FCN。
2.不使用region proposal的,YOLO,SSD。
我觉得,这些工作都体现的一个趋势:如何让不同ROI(Region of Interest)之间尽量多的共享计算量,并充分利用CNN得到
的特征,使得整个detection的速度变快。
下面就大致介绍一下上面提到的一些算法
三、基于侯选区域(Region Proposal)的深度学习目标检测法
1.R-CNN
(2) 利用selective search算法在图像中从下到上提取2000个左右的Region Proposal
(3) 将每个Region Proposal缩放(warp)成227x227的大小并输入到CNN,将CNN的fc7层的输出作为特征
(4) 将每个Region Proposal提取到的CNN特征输入到SVM进行分类
注:
2)对于SVM分好类的Region Proposal做边框回归(bounding-box
proposal提取到的窗口跟目标真实窗口更吻合。因为region proposal提取到的窗口不可能跟人手工标记那么准,如果region
proposal跟目标位置偏移较大,即便是分类正确了,但是由于IoU(region
proposal与Ground Truth的窗口的交集比并集的比值)低于0.5,那么相当于目标还是没有检测到。
3)R-CNN缺点:
(1) 训练分为多个阶段,步骤繁琐: 微调网络+训练SVM+训练边框回归器
(2) 训练耗时,占用磁盘空间大:5000张图像产生几百G的特征文件
(3) 速度慢: 使用GPU, VGG16模型处理一张图像需要47s。
(4) 测试速度慢:每个候选区域需要运行整个前向CNN计算
(5) SVM和回归是事后操作:在SVM和回归过程中CNN特征没有被学习更新
2.SPP-NET
RCNN使用CNN作为特征提取器,首次使得目标检测跨入深度学习的阶段。但是RCNN对于每一个区域候选都需要首先将图片放
缩到固定的尺寸(224*224),然后为每个区域候选提取CNN特征。容易看出这里面存在的一些性能瓶颈:
- 速度瓶颈:重复为每个region proposal提取特征是极其费时的,Selective Search对于每幅图片产生2K左右个region proposal,也就是意味着一幅图片需要经过2K次的完整的CNN计算得到最终的结果。
- 性能瓶颈:对于所有的region proposal防缩到固定的尺寸会导致我们不期望看到的几何形变,而且由于速度瓶颈的存在,不可能采用多尺度或者是大量的数据增强去训练模型。
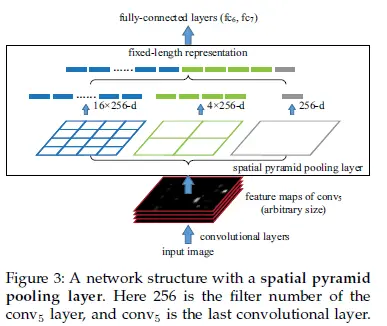
具体思路为:CNN的卷积层是可以处理任意尺度的输入的,只是在全连接层处有限制尺度——换句话说,如果找到一个方法,在全连接层之前将其输入限制到等长,那么就解决了这个问题。
具体方案如下图所示:
(1) 训练分为多个阶段,步骤繁琐: 微调网络+训练SVM+训练训练边框回归器
(2) SPP-NET在微调网络的时候固定了卷积层,只对全连接层进行微调,而对于一个新的任务,有必要对卷积层也进行微调。(分类的模型提取的特征更注重高层语义,而目标检测任务除了语义信息还需要目标的位置信息)
针对这两个问题,RBG又提出Fast R-CNN, 一个精简而快速的目标检测框架。
3.Fast R-CNN

layer只需要下采样到一个7x7的特征图。对于VGG16网络conv5_3有512个特征图,这样所有region proposal对应了一个7*7*512
(2) R-CNN训练过程分为了三个阶段,而Fast R-CNN直接使用softmax替代SVM分类,同时利用多任务损失函数边框回归也加入到
(3) Fast R-CNN在网络微调的过程中,将部分卷积层也进行了微调,取得了更好的检测效果。


1)Fast R-CNN优点:
Fast R-CNN融合了R-CNN和SPP-NET的精髓,并且引入多任务损失函数,使整个网络的训练和测试变得十分方便。在
2)Fast R-CNN 缺点:
Region Proposal的提取使用selective search,目标检测时间大多消耗在这上面(提Region Proposal2~3s,而提特征分类只
4.Faster R-CNN
(1)输入测试图像;
(2)将整张图片输入CNN,进行特征提取;
(3)用RPN生成建议窗口(proposals),每张图片生成300个建议窗口;
(4)把建议窗口映射到CNN的最后一层卷积feature map上;
(5)通过RoI pooling层使每个RoI生成固定尺寸的feature map;
(6)利用Softmax Loss(探测分类概率) 和Smooth L1 Loss(探测边框回归)对分类概率和边框回归(Bounding box regression)联合训练.
相比FASTER-RCNN,主要两处不同:
(1)使用 RPN(Region Proposal Network)代替原来的Selective Search方法产生建议窗口;
(2)产生建议窗口的CNN和目标检测的CNN共享

RPN的核心思想
是使用卷积神经网络直接产生Region Proposal,使用的方法本质上就是滑动窗口。RPN的设计比较巧妙,RPN只需在最后
的卷积层上滑动一遍,因为Anchor机制和边框回归可以得到多尺度多长宽比的Region Proposal。
小结:
Faster R-CNN将一直以来分离的region proposal和CNN分类融合到了一起,使用端到端的网络进行目标检测,无论在速度上
总的来说,从R-CNN, SPP-NET, Fast R-CNN, Faster R-CNN一路走来,基于深度学习目标检测的流程变得越来越精简,精
5.R-FCN
顾名思义:全卷积网络,就是全部是卷积层,而没有全连接层(fc)。
R-FCN(基于区域的检测器)的方法是:在整个图像上共享计算,通过移除最后的fc层实现(即删除了所有的子网络)。使用“位
此矛盾为:物体分类要求平移不变性越大越好 (图像中物体的移动不用区分),而物体检测要求有平移变化。所以,ImageNet

k^2(C+1)的conv: ResNet101的输出是W*H*1024,用K^2(C+1)个1024*1*1的卷积核去卷积即可得到K^2(C+1)个大小为W*H


k^2(C+1)个feature map的物理意义: 共有k*k = 9个颜色,每个颜色的立体块(W*H*(C+1))表示的是不同位置存在目标的概率值
ROI pooling: 就是faster RCNN中的ROI pooling,也就是一层的SPP结构。主要用来将不同大小的ROI对应的feature map映射成
ROI pooling的输入和输出:ROI pooling操作的输入(对于C+1个类)是k^2*(C+1)*W' *H'(W'和H'是ROI的宽度和高度)的score
1.YOLO
YOLO:You Only Look Once: Unified, Real-Time Object Detection
YOLO检测网络包括24个卷积层和2个全连接层,如下图所示。

其中,卷积层用来提取图像特征,全连接层用来预测图像位置和类别概率值。
YOLO网络借鉴了GoogLeNet分类网络结构。不同的是,YOLO未使用inception
module,而是使用1x1卷积层(此处1x1卷积层的存在是为了跨通道信息整合)+3x3卷积层简单替代。
YOLO论文中,作者还给出一个更轻快的检测网络fast YOLO,它只有9个卷积层和2个全连接层。使用titan x GPU,fast YOLO可以达到155fps的检测速度,但是mAP值也从YOLO的63.4%降到了52.7%,但却仍然远高于以往的实时物体检测方法(DPM)的mAP值。
YOLO全连接输出层的定义
YOLO将输入图像分成SxS个格子,每个格子负责检测‘落入’该格子的物体。若某个物体的中心位置的坐标落入到某个格
子,那么这个格子就负责检测出这个物体。如下图所示,图中物体狗的中心点(红色原点)落入第5行、第2列的格子内,所以这
个格子负责预测图像中的物体狗。

每个格子输出B个bounding box(包含物体的矩形区域)信息,以及C个物体属于某种类别的概率信息。
Bounding box信息包含5个数据值,分别是x,y,w,h,和confidence。其中x,y是指当前格子预测得到的物体的bounding box
的中心位置的坐标。w,h是bounding box的宽度和高度。注意:实际训练过程中,w和h的值使用图像的宽度和高度进行归一化
到[0,1]区间内;x,y是bounding box中心位置相对于当前格子位置的偏移值,并且被归一化到[0,1]。confidence反映当前
bounding box是否包含物体以及物体位置的准确性。
YOLO将目标检测任务转换成一个回归问题,大大加快了检测的速度,使得YOLO可以每秒处理45张图像。而且由于每个网
络预测目标窗口时使用的是全图信息,使得false positive比例大幅降低(充分的上下文信息)。但是YOLO也存在问题:没有了
Region Proposal机制,只使用7*7的网格回归会使得目标不能非常精准的定位,这也导致了YOLO的检测精度并不是很高。
2.SSD

(1)多尺度的特征图检测(Multi-scale),如SSD同时使用了上图所示的8*8的特征图和4*4特征图。
(2)相比于YOLO,作者使用的是卷积层来代替了YOLO的全连接层做预测。(如下图所示)
(3)SSD使用了默认的边界框+(1,2/1,3/1,1/2,1/3)6个框来做检测(aspect ratios)
SSD和YOLO的比较如下:
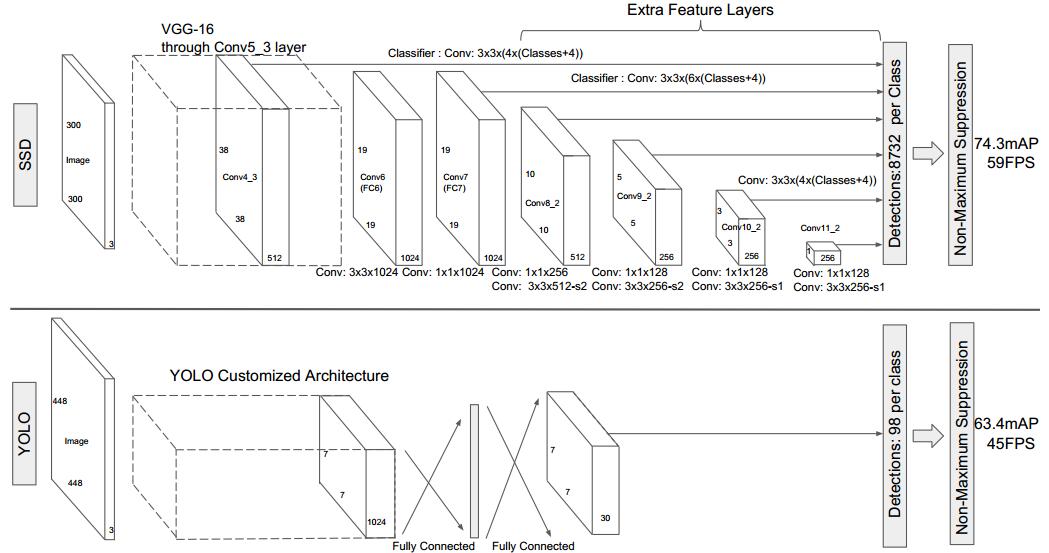
SSD结合了YOLO中的回归思想和Faster R-CNN中的anchor机制,使用全图各个位置的多尺度区域特征进行回归, 既保持了YOLO速度快的特性,也保证了窗口预测的跟Faster R-CNN一样比较精准。SSD在VOC2007上mAP可以达到72.1%,
















 4465
4465











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









