







 介绍EAST文本检测算法,包括全卷积网络和非极大值抑制技术。该算法能灵活生成词级或行级预测,采用局部感知NMS提高检测效率。
介绍EAST文本检测算法,包括全卷积网络和非极大值抑制技术。该算法能灵活生成词级或行级预测,采用局部感知NMS提高检测效率。
文章目录
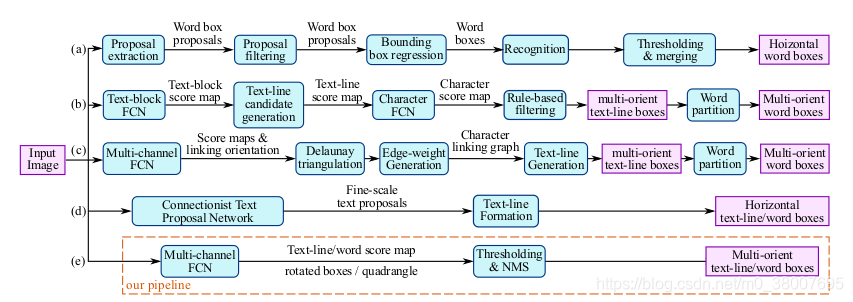
论文中作者网络(e)与其他网络对比
贡献
- 只包含两个阶段:全卷积网络(FCN)和非极大值抑制(NMS)。FCN直接产生文本区域,没有冗余和耗时的中间步骤。
- 可以灵活的生成词级或者行级的预测,它们的几何形状可以是旋转框或者四边形。
- 采用了Locality-Aware NMS来对生成的几何进行过滤
- 所提出的算法在精度和速度方面都有所提高
方法
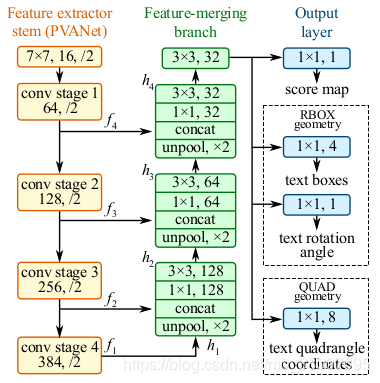
特征提取主干 + 特征合并分支 + 输出层部分
1. Pipeline
该模型是一个全卷积的神经网络,适用于文本检测,输出密集的每个像素预测的单词或文本行。后处理步骤仅包括预测几何形状的阈值和NMS。
其中将图像输入到FCN,并且生成多个像素级文本得分图(Score Map)和几何通道图。预测通道中的一个是得分图,其像素值在[0,1]的范围内。 其余通道表示从每个像素的视图中包围该单词的几何。 分数代表在相同位置预测的几何形状的置信度。
两种几何形状(旋转框RBOX和四边形QUAD),分别设计了不同的损失函数。使用阈值过滤掉一些几何,然后NMS,得到最终输出。
2.Network Design(网络设计)
特征融合(结合不同级别的网络特征)。为了降低计算成本没有采用HyperNet,而是采用了U形网络的思想。
特征提取主干 + 特征合并分支 + 输出层部分
-
特征能提取主干:用于提取特征,采用 PVANet(文末的代码中使用的是ResNet_v1_50)
-
特征合并分支:
-
在每个合并阶段,使用最后一个阶段的feature map 进行uppooling(上采样将原图像放大2倍)
-
然后与前一层 feature map 连接 concatenate
-
接着使用1×1卷积核减少通道数量并减少计算(卷积核的个数128,64,32)
-
然后使用3×3卷积核产生该合并阶段的输出(卷积核的个数128,64,32)
在最后一个合并阶段,使用只使用3x3的卷积核产生合并阶段最终的feature map,并给输出层。
-
-
输出层,有若干1×1卷积操作,将32通道的特征图投影到 1通道的得分图 F s F_s Fs 和 多通道几何图 F g F_g Fg中。 几何输出可以是RBOX或QUAD。(文末的代码中只实现了RBOX)
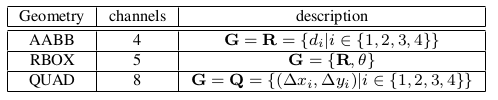
- RBOX 几何形状由4个通道的轴对齐边界框(AABB)R和1个通道旋转角θ表示。其中4个通道分别表示从像素位置到矩形的顶部,右侧,底部,左部的4个距离。
- QUAD 使用8个数字来表示从四边形的四个角顶点 { p i ∣ i ∈ { 1 , 4 , 3 , 4 } } \{p_i|i∈\{1,4,3,4\}\} {pi∣i∈{1,4,3,4}}到像素位置的距离。 每一个距离包含两个数字 ( Δ x i , Δ y i ) (Δx_i, Δy_i) (Δxi,Δyi),因此几何输出包含8个通道。
3.Label Generation(标签生成)
标签生成流程图
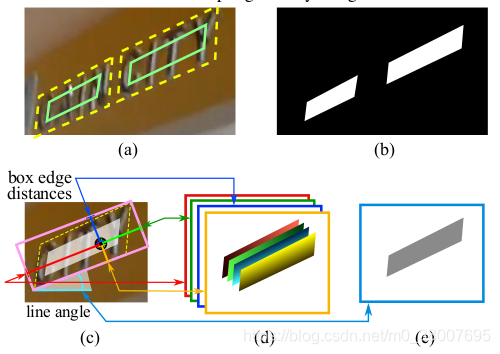
(a)文本四边形(黄色虚线)和压缩四边形(绿色实线)
(b)文本分数图(text score map)
(c)RBOX几何图生成
(d)每个像素到矩形边界的4个通道距离
(e)旋转角度
-
分数图(Score Map)的生成
-
分数图上四边形的正面积设计为原始面积的缩小版
-
对于四边形 Q = { p i ∣ i ∈ 1 , 2 , 3 , 4 } Q = \{p_i|i∈{1,2,3,4}\} Q={pi∣i∈1,2,3,4},其中 p i = { x i , y i } p_i = \{x_i, y_i\} pi={xi,yi}是四边形上的顶点,以顺时针顺序排列。 为了缩小Q,我们首先计算每个顶点 p i p_i pi的参考长度 r i r_i ri
r i = m i n ( D ( p i , p ( i m o d 4 ) + 1 ) , D ( p i , p ( ( i + 2 ) m o d 4 ) + 1 ) ) r_i = min(D(p_i, p_{(i mod 4) + 1}),D(p_i, p_{((i + 2) mod 4) + 1})) ri=min(D(pi,p(imod4)+1),D(pi,p((i+2)mod4)+1))
此处 D ( p i , p j ) D(p_i, p_j) D(pi,pj)是 p i p_i pi 和 p j p_j pj 的 L2 距离我们首先缩小四边形的两个较长边,然后缩短两个较短边。对于每对两个相对的边,我们通过比较它们的长度的平均值来确定“更长”的对。 对于每个边 < p i , p ( i m o d 4 ) + 1 > <p_i,p_{(i mod 4)+1}> <pi,p(imod4)+1>,我们通过将其两个端点沿边缘向内移动 0.3 r i 0.3r_i 0.3ri和 0.3 r ( i m o d 4 ) + 1 0.3r_{(i mod 4)+1} 0.3r(imod4)+1来缩小它。
-
-
几何图(Geometry Map)的生成
对于那些文本区域以QUAD样式注释的数据集(例如,ICDAR 2015),首先生成一个旋转矩形,用最小的面积覆盖区域。然后对于每个具有正分数的像素,我们计算它到文本框的4个边界的距离,并将它们放到RBOX ground truth 的 4 个通道中。 对于QUAD ground truth,8通道几何图中具有正分数的每个像素的值是其从四边形的4个顶点的坐标偏移。
4. Loss Functions(损失函数)
L = L s + λ g L g L = L_s + \lambda_g L_g L=Ls+λgLg
L s L_s Ls代表分数损失, L g L_g Lg代表几何的损失, λ g \lambda_g λg代表两个损失的重要性,在论文中,设置为1
1. Loss for Score Map ( L s L_s Ls)
类平衡交叉熵(class-balanced cross-entropy):用于解决类别不平衡训练,避免通过 平衡采样和硬负挖掘 解决目标物体的不平衡分布,简化训练过程
L
s
=
b
a
l
a
n
c
e
d
−
x
e
n
t
(
Y
^
,
Y
∗
)
=
−
β
Y
∗
l
o
g
Y
^
−
(
1
−
β
)
(
1
−
Y
∗
)
l
o
g
(
1
−
Y
^
)
L_s = balanced-xent(\hat{Y},Y^*) = -\beta{Y^*}log\hat{Y} - (1-\beta)(1-Y^*)log(1-\hat{Y})
Ls=balanced−xent(Y^,Y∗)=−βY∗logY^−(1−β)(1−Y∗)log(1−Y^)
这里
Y
^
\hat{Y}
Y^ 是score map 的预测值,
Y
∗
Y^*
Y∗是Ground Truth。参数
β
\beta
β 是正样本和负样本的平衡因子:
β
=
1
−
∑
y
∗
∈
Y
∗
y
∗
∣
Y
∗
∣
\beta = 1 - \frac{\sum_{y^*\in Y^*}y^*}{|Y^*|}
β=1−∣Y∗∣∑y∗∈Y∗y∗
在文末的代码中实现这部分损失使用的是 dice classification loss ,而不是文中的class-balanced cross-entropy,关于这两个损失哪个好,可以阅读文章 Generalised Dice overlap as a deep learning loss function for highly unbalanced segmentations,或者自己尝试一下。
2. Loss for Geometries ( L g L_g Lg)
文本在自然场景中的尺寸变化极大。直接使用L1或者L2损失去回归文本区域将导致损失偏差朝更大更长.因此论文中采用IoU损失在 RBOX 回归的 AABB 部分,尺度归一化的 smoothed-L1 损失在 QUAD 回归,来保证几何形状的回归损失是尺度不变的
-
RBOX
交并比损失
L A A B B = − l o g I o U ( R ^ , R ∗ ) = − l o g ∣ R ^ ∩ R ∗ ∣ ∣ R ^ ∪ R ∗ ∣ L_{AABB} = -log IoU(\hat{R}, R^*) = -log \frac{|\hat{R}\cap R^*|}{|\hat{R}\cup R^*|} LAABB=−logIoU(R^,R∗)=−log∣R^∪R∗∣∣R^∩R∗∣
R ^ \hat{R} R^ 代表AABB四边形的预测, R ∗ R^* R∗是对应的Ground Truth, ∣ R ^ ∩ R ∗ ∣ |\hat{R}\cap R^*| ∣R^∩R∗∣的宽和高是:
w i = m i n ( d 2 ^ , d 2 ∗ ) + m i n ( d 4 ^ , d 4 ∗ ) h i = m i n ( d 1 ^ , d 1 ∗ ) + m i n ( d 3 ^ , d 3 ∗ ) w_i = min(\hat{d_2}, d_2^*) + min(\hat{d_4}, d_4^*)\\ h_i = min(\hat{d_1}, d_1^*) + min(\hat{d_3}, d_3^*) wi=min(d2^,d2∗)+min(d4^,d4∗)hi=min(d1^,d1∗)+min(d3^,d3∗)
d 1 d_1 d1, d 2 d_2 d2, d 3 d_3 d3, d 4 d_4 d4代表从一个像素到它对应矩形的顶部,右边,底部,左边的距离,相交的面积为:
∣ R ^ ∪ R ∗ ∣ = ∣ R ^ ∣ + ∣ R ∗ ∣ − ∣ R ^ ∩ R ∗ ∣ |\hat{R} \cup R^*| = |\hat{R}| + |R^*| - |\hat{R} \cap R^*| ∣R^∪R∗∣=∣R^∣+∣R∗∣−∣R^∩R∗∣
接下来,旋转角的损失计算:
L θ ( θ ^ , θ ∗ ) = 1 − c o s ( θ ^ − θ ∗ ) L_\theta (\hat{\theta}, \theta^*) = 1 - cos(\hat{\theta} - \theta^*) Lθ(θ^,θ∗)=1−cos(θ^−θ∗)
θ ^ \hat{\theta} θ^是预测的旋转角, θ ∗ \theta^* θ∗是Ground Truth。最后,总体损失为AABB损失和旋转角损失的加权和:
L g = L A A B B + λ θ L θ L_g = L_{AABB} + \lambda_\theta L_\theta Lg=LAABB+λθLθ
论文中 λ θ \lambda_\theta λθ设置为10。 -
QUAD
添加归一化的 Smoothed-L1
C Q = { x 1 , y 1 , x 2 , y 2 , . . . , x 4 , y 4 } C_Q = \{x_1, y_1, x_2, y_2, ..., x_4, y_4\} CQ={x1,y1,x2,y2,...,x4,y4}
损失值:
L g = L Q U A D ( Q ^ , Q ∗ ) = min Q ~ ∈ P Q ∗ ∑ c i ∈ C Q c i ~ ∈ C Q ~ s m o o t h e d L 1 ( c i − c i ~ ) 8 × N Q ∗ L_g = L_{QUAD} (\hat{Q}, Q^*) = \min_{\tilde{Q} \in P_{Q^*}} \sum_{{c_i \in C_{Q}} \ {\tilde{c_i} \in C_{\tilde{Q}}}} \frac{smoothed_{L1}(c_i - \tilde{c_i})}{8 × N_{Q^*}} Lg=LQUAD(Q^,Q∗)=Q~∈PQ∗minci∈CQ ci~∈CQ~∑8×NQ∗smoothedL1(ci−ci~)
其中归一化项 N Q ∗ N_ {Q^*} NQ∗是四边形的短边长度,由下式给出
N Q ∗ = min i = 1 4 D ( p i , p ( i m o d 4 ) + 1 ) N_{Q^*} = \min_{i=1}^4 D(p_i, p_{(i mod 4) + 1}) NQ∗=i=1min4D(pi,p(imod4)+1)
P Q P_Q PQ是具有不同顶点排序的 Q ∗ Q^* Q∗的所有等效四边形的集合。 由于公共训练数据集中的四边形标注不一致,因此需要这种排序排列。
5. Locality-Aware NMS(局部感知NMS)
由于本文产生的几何体数量加大,使用普通的NMS时间复杂度太高( O ( n 2 ) O(n^2) O(n2)),针对这个,提出了基于行合并几何体的方法(加权平均)。
假设来自邻近像素的几何形状倾向于高度相关,就逐行合并几何,并且在同一行中合并几何形状时,我们将迭代地合并相邻两个四边形。 这种改进的技术在最佳场景(只有一个文本行出现在图像中的情况。 在这种情况下,如果网络足够强大,所有几何形状将高度重叠)中以 O ( n ) O(n) O(n)运行。 即使最坏的情况也与普通NMS情况相同,只要假设成立,算法就会在实践中运行得足够快。
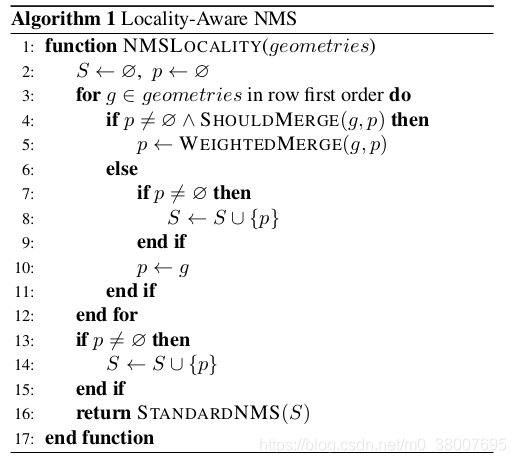
首先按照 y y y 轴坐标对四边形进行排序,进行逐行遍历,相邻的两个四边形 p p p 和 q q q 达到设定的阈值便进行合并,否则不进行合并。 S S S 中存储的是合并之后的四边形。合并之后再进行标准的NMS。
合并: 在 W E G H T M E R G E ( g , p ) \large{W} \small{EGHT}\large{M}\small{ERGE}\large(g, p) WEGHTMERGE(g,p) 中,合并四边形的坐标通过两个给定四边形的分数进行加权平均。若 a = W E G H T M E R G E ( g , p ) a = \large{W} \small{EGHT}\large{M}\small{ERGE}\large(g, p) a=WEGHTMERGE(g,p) ,则 a i = V ( g ) g i + V ( p ) p i a_i = V(g)g_i + V(p) p_i ai=V(g)gi+V(p)pi 且 V ( a ) = V ( g ) + V ( p ) V(a) = V(g) + V(p) V(a)=V(g)+V(p) , a i a_i ai 是 a a a 在 i i i 处的坐标, V ( a ) V(a) V(a) 是四边形 a a a 的得分。
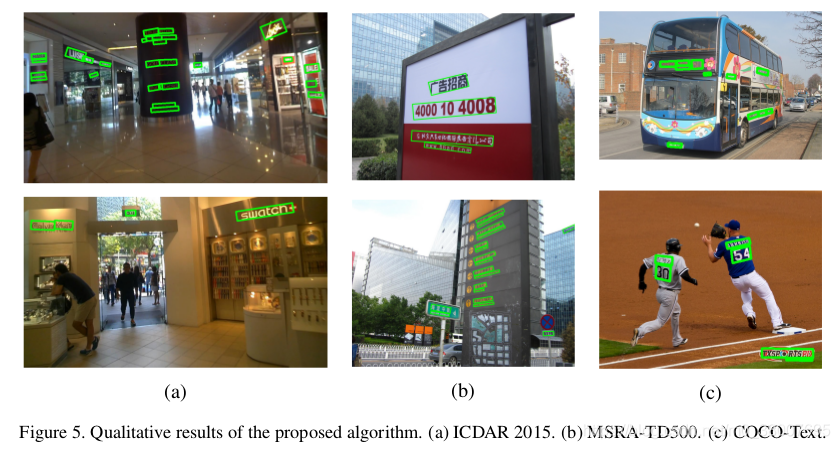
论文中给出的检测效果图:
总结
EAST由于感受野不够大,所以对较长文本行检测效果不是太好,比较适合短文本行检测。
CTPN由于LSTM的存在,对长文字的检测效果比EAST好,但是对于倾斜的文本行检测效果不太好。


















 1723
1723

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











