






一、原理介绍
当电机运行至中高速阶段时,反电动势能被观测器准确估计,因此基于电机模型的反电动势法成为无位置控制系统的不二之选。而SMO由于对电机参数变化不敏感,鲁棒性高,结构简单等优点被广泛应用。
在实际应用中,无位置控制系统中的开关频率受时间延迟、系统惯性以及数字离散化等的限制,不能满足控制函数可无限开关的条件,因此,状态变量只能在稳定点来回小幅度运动, 而不能收敛在平衡点处,因此导致滑模观测器的抖振[5],从而导致SMO估计的反电动势存在谐波含量。除此之外死区效应导致电压给定值与实际值之间的误差,使反电动势产生畸变。此外, 电机本体设计中的气隙也导致反电动势波形失真率高。
由于以上因素,反电动势估计值中包含大量谐波干扰位置观测准确性,因此需要滤波器对控制函数进行处理。通常采用LPF来获取估计反电动势的基波波形,但滤波器的输入与输出间的相位存在滞后,导致估计转子位置与实际位置有较大的相位差,可通过估计转子角频率ωˆe与LPF的截止频率wc比值的反正切来补偿相位差。但是估计的角频率ωˆe是对估计位置θˆe的微分,因此相位补偿的准确性不能保证。
当电机的载波比较低,即电机转速高,控制频率较低时,SMO的抖振对估计精度的影响比
较明显。并且与SFE不同,WSFEF存在负反馈环节,闭环结构,同时引入基波频率ω0,保证WSFEF的带宽不受频率影响。
二、仿真模型
在MATLAB/simulink里面验证所提算法,搭建仿真。采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。仿真模型如下所示:
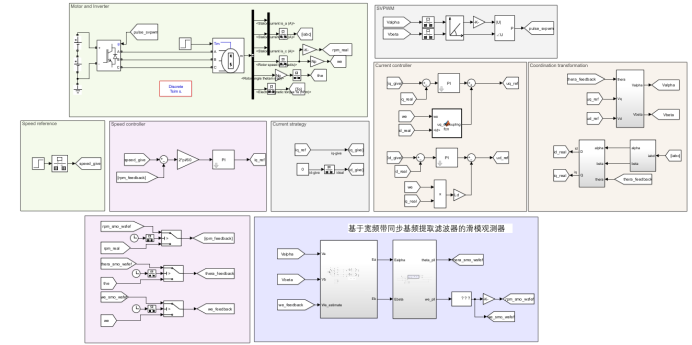
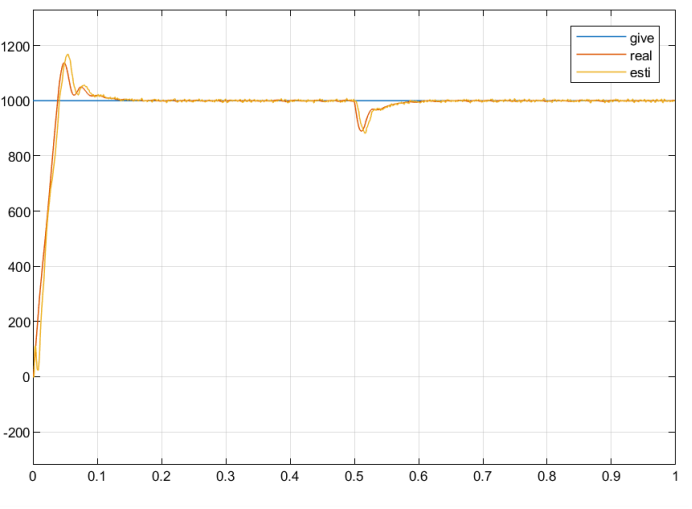
仿真工况:电机空载零速启动,0s阶跃给定转速1000rpm,0.5s施加额定负载
2.1给定转速、实际转速和估计转速
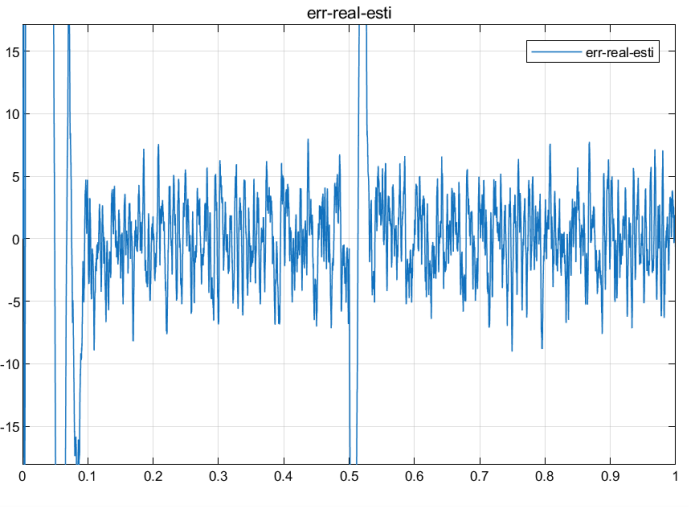
2.2估计转速与实际转速误差
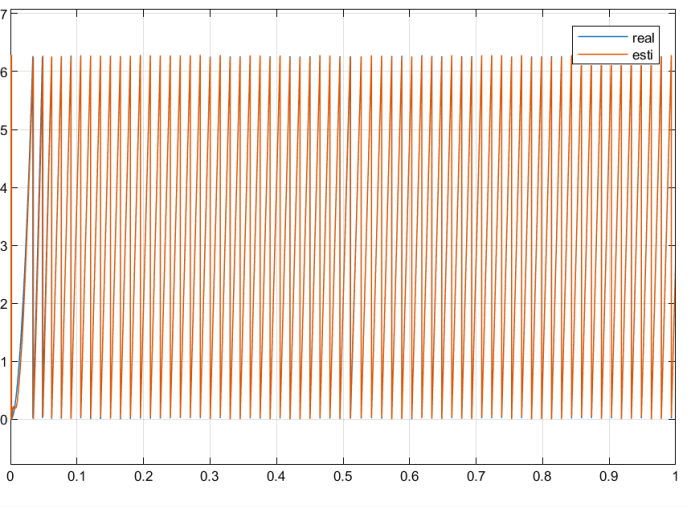
2.3估计转角与实际转角
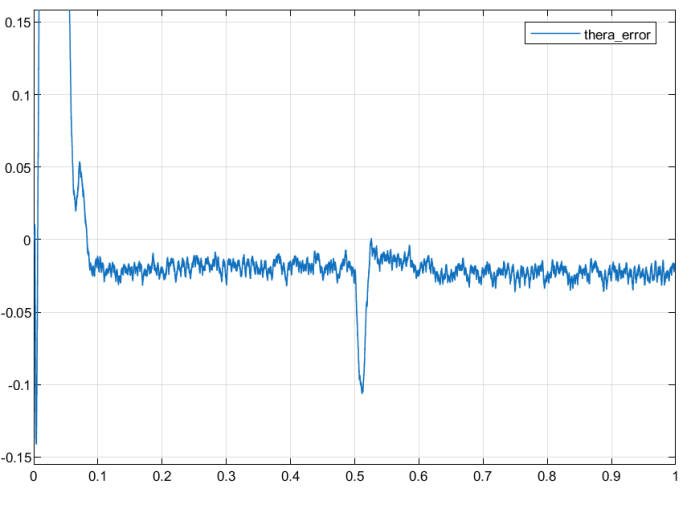
2.4估计转角与实际转角误差
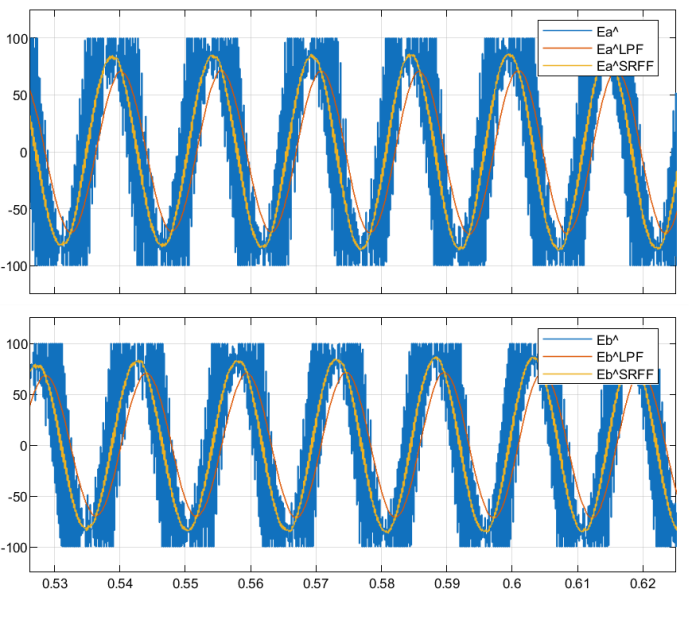
2.5 滤波前、LPF滤波后和WSFEF滤波后估计反电动势
为解决SFE的带宽受输入信号频率的影响,应用无位置控制中导致电机易失步的危险,研究宽频带同步基波提取滤波器,来提取滑模观测器输出的估计反电动势基波分量;并将 WSFEF-PLL结构用来提取PMSM的转子位置和转速信息。相比较于其他算法,该方法具有以下的优点:
1)与SFE相同的是,WSFEF有效地消除输入信号中杂糅的谐波分量,基波提取更准确, 但克服了SFE带宽对输入信号频率的强依赖性,更易稳定,应用领域更广阔。
2)所提出的WSFE-PLL结构,转子位置和转速的估计误差更小,谐波含量更小,从而系统控制精度更高。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









