 永磁同步电机滑模观测器控制
永磁同步电机滑模观测器控制





一、原理介绍
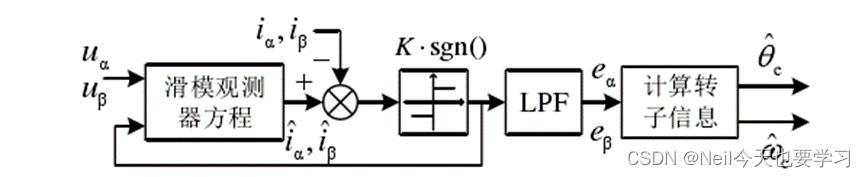
在永磁同步电机滑模观测器控制中,转子的位置和转速信息与反动电势密切相关。滑模观测器控制基本设计思路是:利用永磁同步电机的电压、电流信息,通过永磁同步电机数学模型,估算出电机在两相静止坐标系中的反电动势信息,估算出转子位置与转速,分别将其反馈给矢量控制的电流环和转速环,实现永磁同步电机无速度传感器控制;滑模观测器模型如图所示。
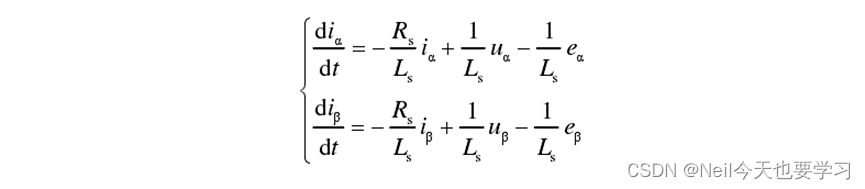
 由永磁同步电机数学模型(SPMSM)可知,永磁同步电机在α-β两相静止坐标的状态方程为:
由永磁同步电机数学模型(SPMSM)可知,永磁同步电机在α-β两相静止坐标的状态方程为:
其中反电动势方程为:

设计滑模观测器控制模型为:
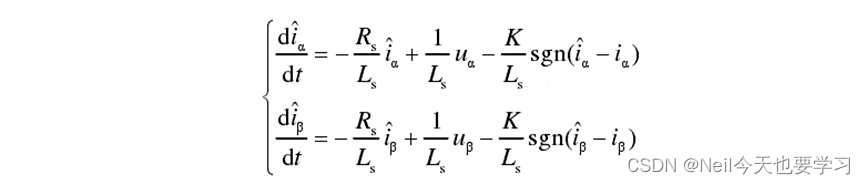
其中K 为滑模观测器开关增益;sgn( ) 为符号函数。
将滑模观测器控制模型与电机数学模型相减,可得滑模观测器状态误差方程为:
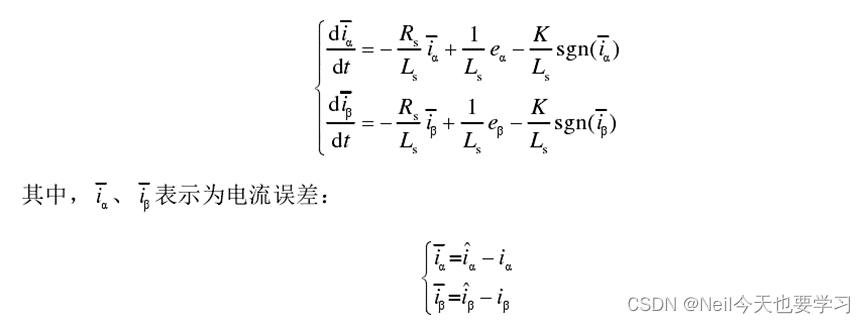
当系统运行到稳定状态时,系统误差及其变化率均将为零

因此可得,滑模观测器的等效反电动势为:

设计观测器滑模面为:

根据 Lyapunov 稳定性定律,使滑模观测器可以有效收敛到滑模面,必须满足下式:

由上式计算得:

为满足系统稳定条件,增益 K 的取值必须足够大;但如果 K 的取值过大时,会使系统的控制变量在滑模面附近反复大幅度切换,极易引起系统强烈“振动”,运动点不能快速收敛,增加系统动态响应时间
由滑模观测器模型求得反电动势表达式为:

其中,wc为低通滤波器截止频率,截止频率越小时,所得的等效反电动势信号谐波越小波形越光滑,反电动势相位滞后越严重。当截止频率接近电机的运行角频率时,将无法检测出正确的反电动势信息,对转速和相位角的估计将会得出错误信息。因此低通滤波器截止频率应选择恰当。
通过sign函数和低通滤波器可近似得到永磁同步电机α-β 轴反电动势,由于反电动势中包含转角信息。在传统滑模观测器中,可采用反正切法求电机相位角和转速:
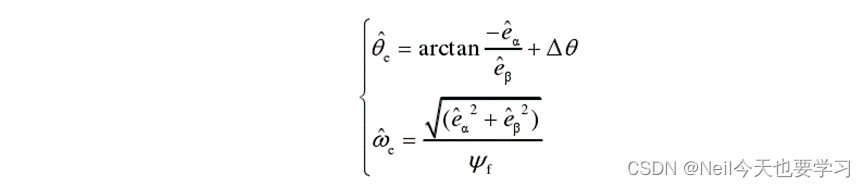

以上转速求解方法仅适用于SPMSM,如果电机类型为IPMSM可以采用对估计转角微分进而求得估计转速。
除了反正切求取估计转角,同理也可以采用反余弦函数求取估计转角。
二、仿真模型
在MATLAB/simulink里面验证所提算法,搭建采用反三角函数的传统SMO仿真。采用和实验中一致的控制周期1e-4,电机部分计算周期为5e-7。仿真模型如下所示:
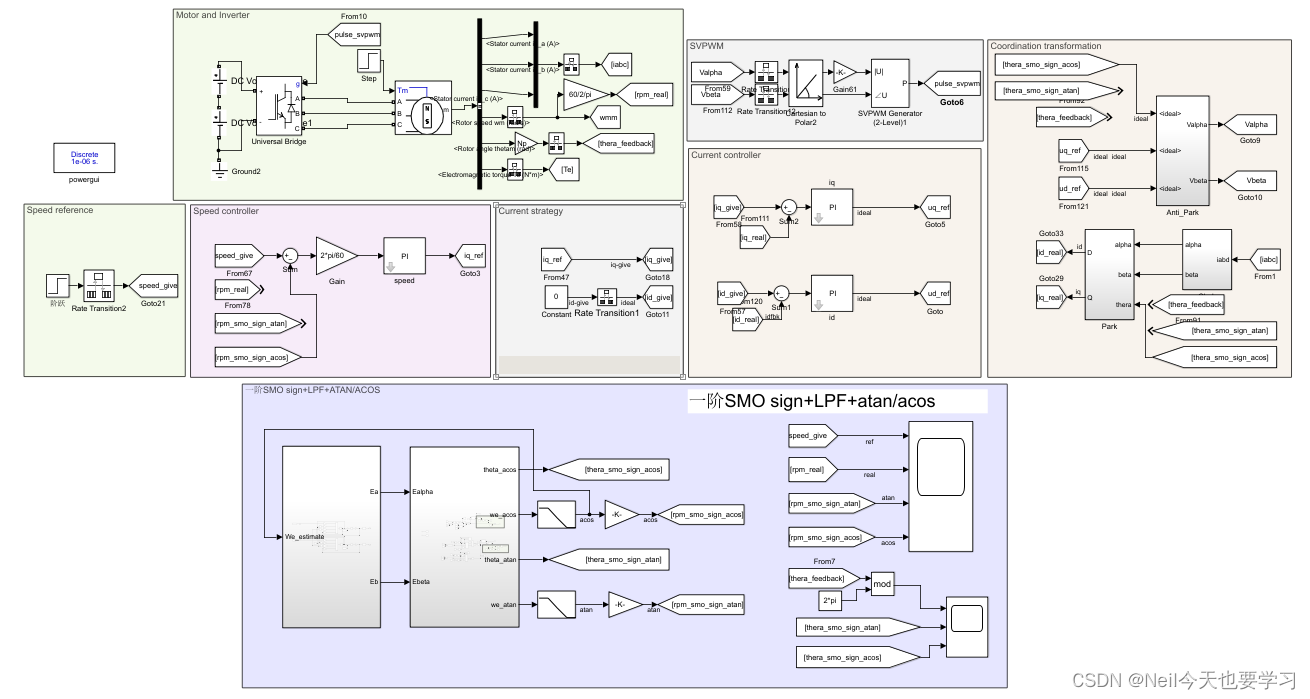
反正切与反余弦效果基本相同,这里仅展示反余弦仿真波形
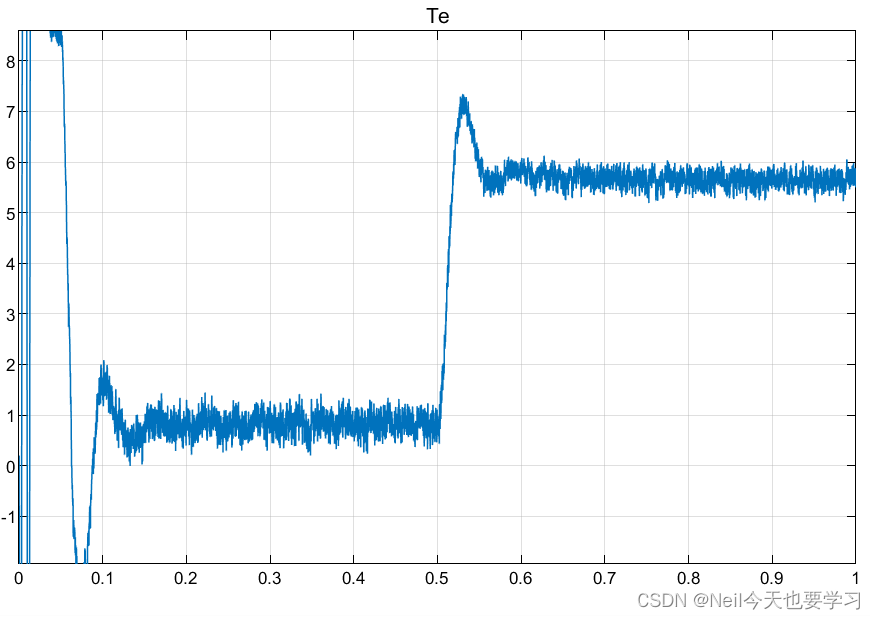
仿真工况:电机空载零速启动,0s阶跃给定转速1000rpm,0.5s施加额定负载
2.1给定转速、实际转速和估计转速
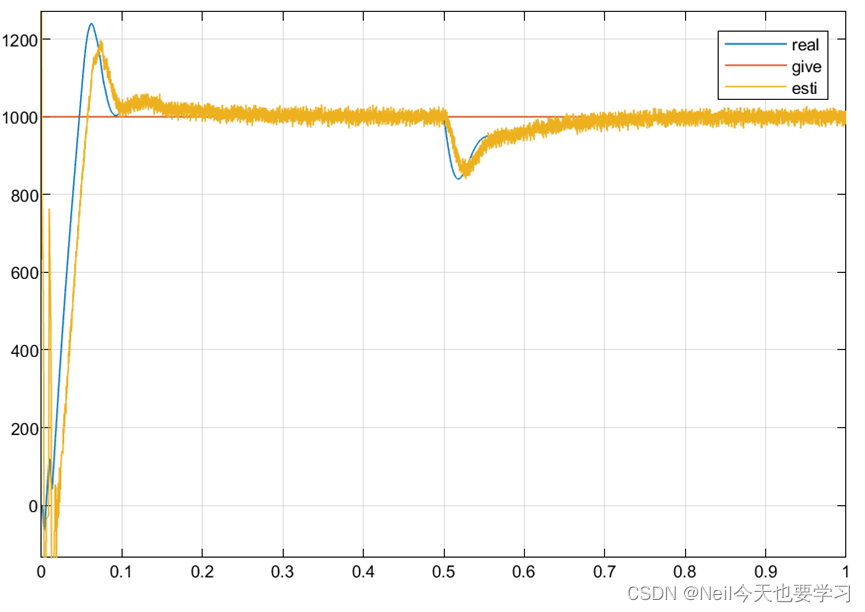
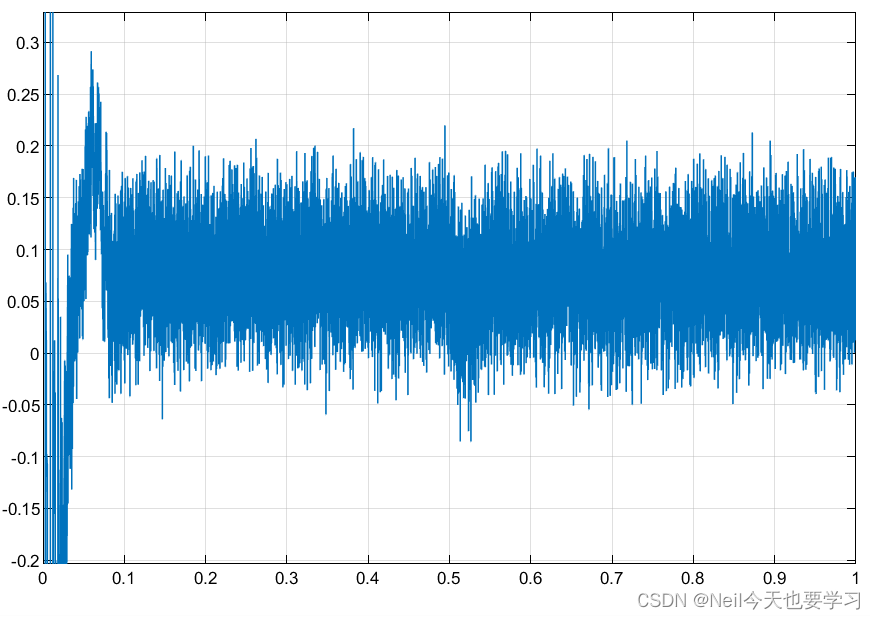
电机从0速启动阶段,存在较大波动,这是由于低速时反电动势幅值较小,信噪比低,估计反电动势不准确,而反三角函数估计方法对反电动势符号变化非常敏感,导致低速时估计性能较差。不过从波形中可以看出,电机仍能启动。并且在大多数应用中,低速通常采用IF或者低速无速度辨识算法,不会依靠SMO来启动,所以启动部分性能可以暂不考虑。
在到达额定转速后,可以看出,估计转速较为准确的跟踪实际转速,电机运行比较平稳。
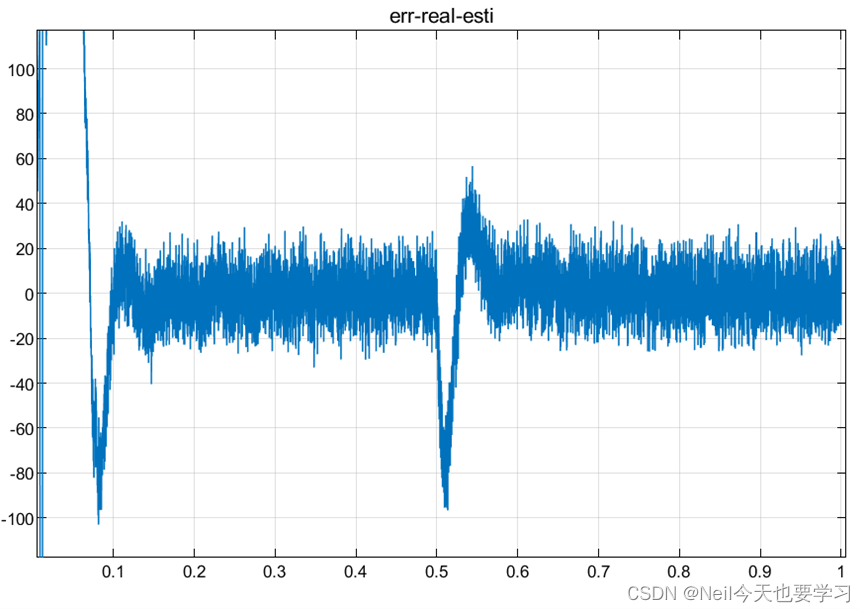
2.2估计转速与实际转速误差
2.3估计转角与实际转角
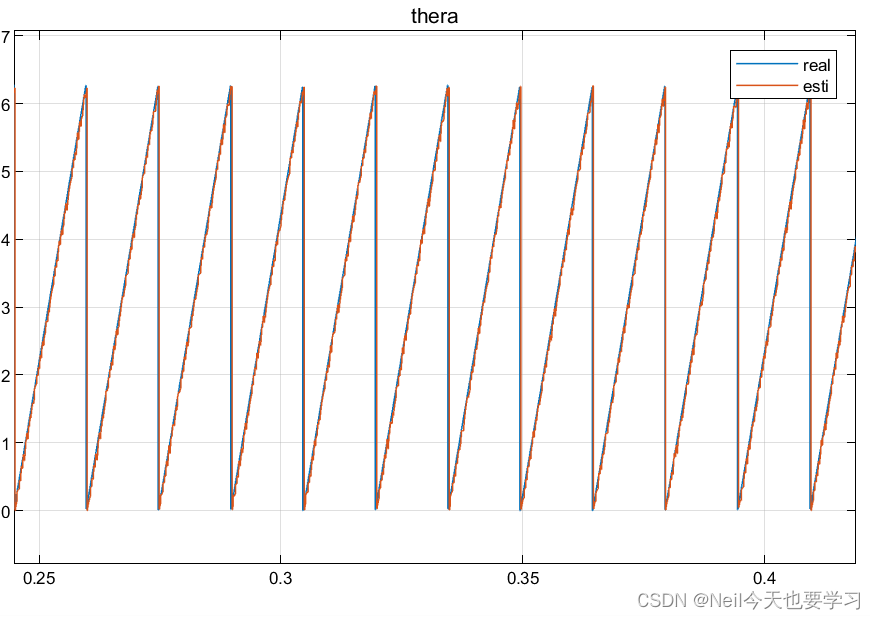
2.4估计转角与实际转角误差
2.5电磁转矩
2.6三相电流
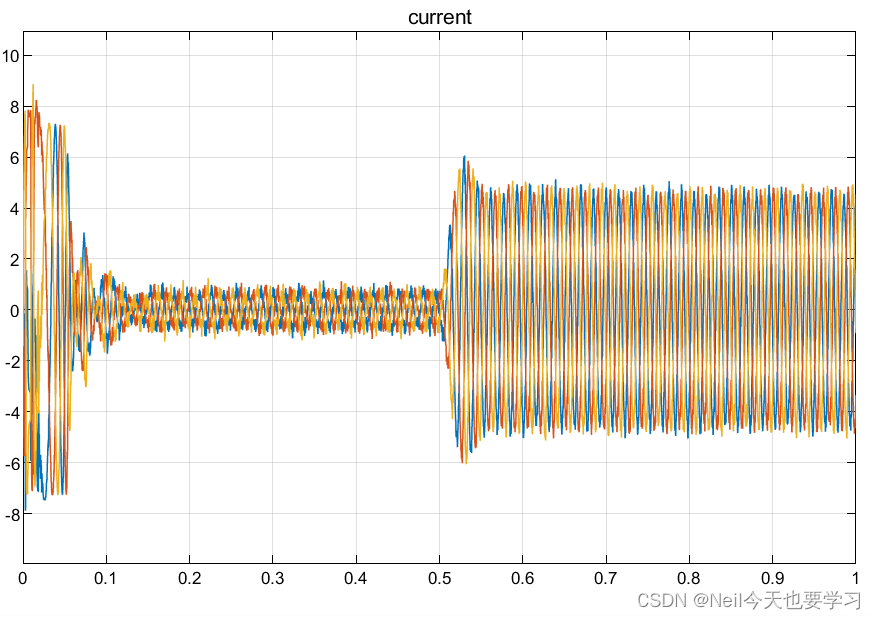
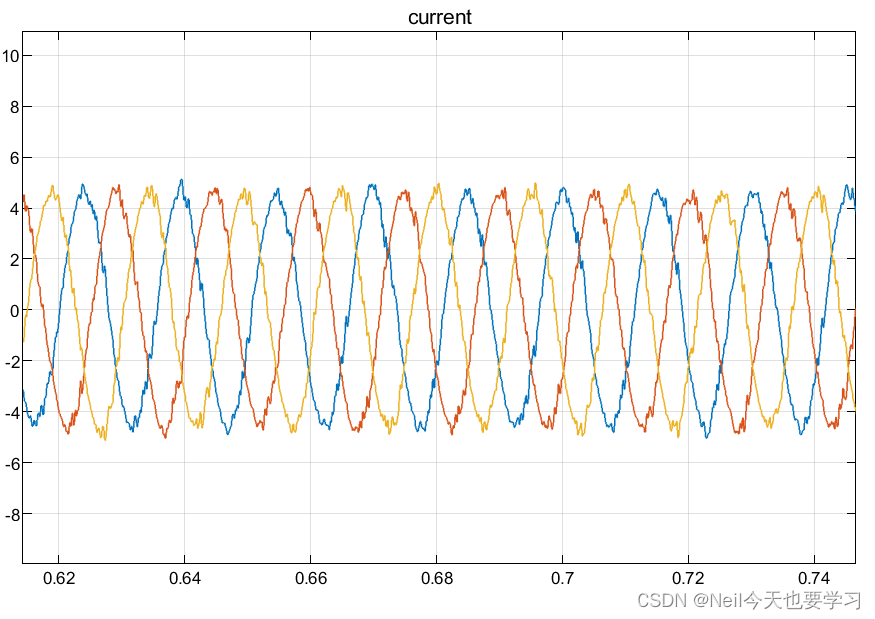
综合来看,传统依靠反三角函数求解的SMO可以实现PMSM的无速度传感器控制,但是由于滑模本身的抖振以及转角转速求解过程的除法微分环节,导致估计转速和转角存在高频脉动,进而导致转矩、电流的波动。
因此需要采用其他改进措施来进一步改善SMO的性能。

















 7
7

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









