







目前,国内外相关学者对 MTPA 控制方法进行了一系列的理论研究与仿真分析。通过研究取得的成果综合来看,该控制方法主要有:直接公式计算法、曲线拟合法、查表法、搜索法、高频信号注入法以及参数辨识法等。
之前的文章中已经介绍了直接公式计算法、曲线拟合法、查表法、参数辨识法(参数辨识方法+直接公式法),接下来将用两篇文章来介绍一下高频信号注入法
一、原理介绍
为了获得IPMSM动效率优化,通过MTPA控制可以最大限度使用内置永磁同步电机的磁阻 转 矩。但是IPMSM由于磁路饱和、交叉耦合和参数受温度影响引起的非线性因素给MTPA控制在实际应用中的实现提出了很大的挑战。传统MTPA方法并没有考虑电机参数变化引起的问题,为了解决该问题,电机参数在线辨识成为MTPA控制的另一研究方向。参数辨识方法虽然作出了很大的优化和改进,但会导致算法变得复杂。高频信号注入式MTPA控制方法不受IPMSM参数变化的影响,能够实现MTPA轨迹实时跟踪
高频信号注入法的核心思想是通过向控制系统中注入高频电流信号产生相应频率的转矩脉动分量,且对转矩脉动分量进行提取使电流矢量角工作在MTPA 控制的最佳工作点上。
该控制系统的结构框图如图所示。
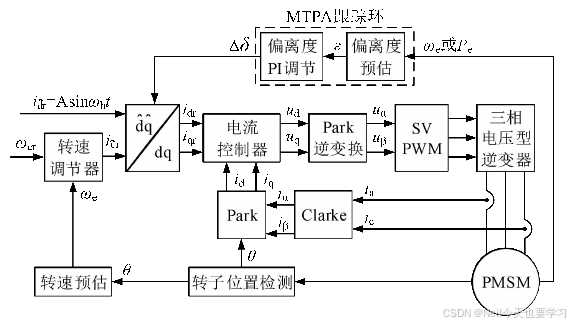
IPMSM高频信号注入式MTPA控制系统框图
外环速度控制器采用PI控制策略,其输出作为q^轴电流给定值iq^。根据新的d^-q^参考
系与d-q同步旋转参考系之间的暂定夹角δ,将在d^-q^参考系中的电流矢量id^、iq^转换为在d-q参考系中的电流矢量id、iq,而暂定夹角δ的值是根据预先计算得出的δMTPA与MTPA跟踪环在线产生的校正角Δδ两者之和。内环d、q轴电流控制器采用PI策略输出电压分量。在转速、转矩稳态条件下,当IPMSM参数发生变化时,实际的变换角δ偏离MTPA轨迹,因此转矩中包含注入频率的脉动分量。根据MTPA跟踪环注入转矩脉动的状况,提取出实际工作点相对于MTPA轨迹的偏离度信息,从而对暂定夹角δ进行实时地矫正,使得系统工作点始终位于MTPA轨迹上。
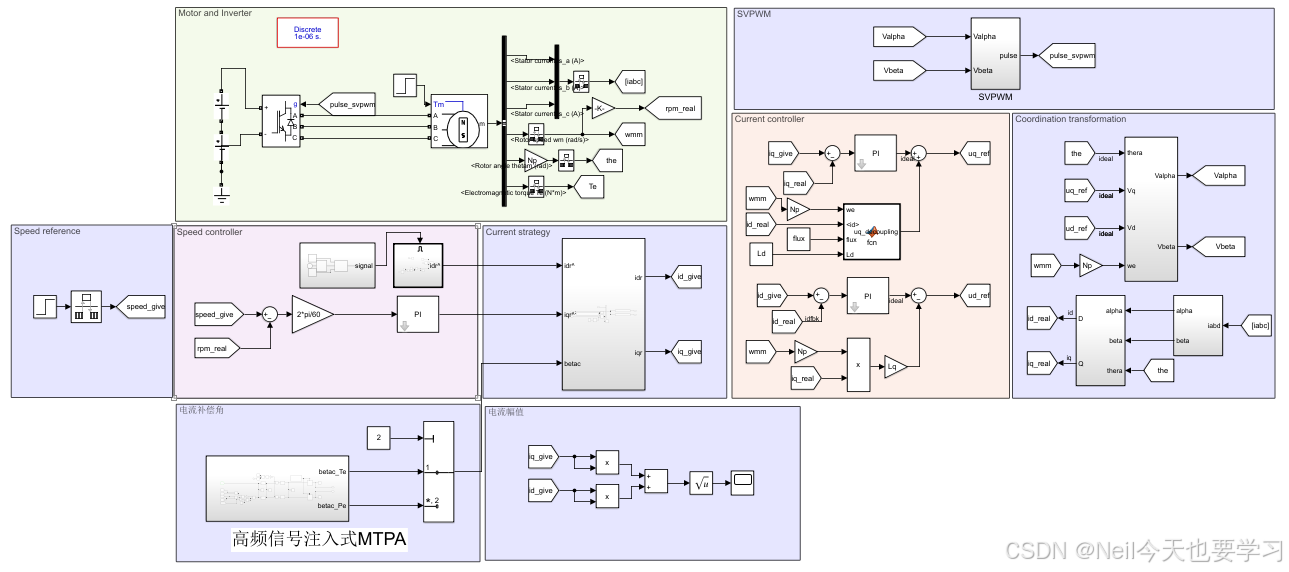
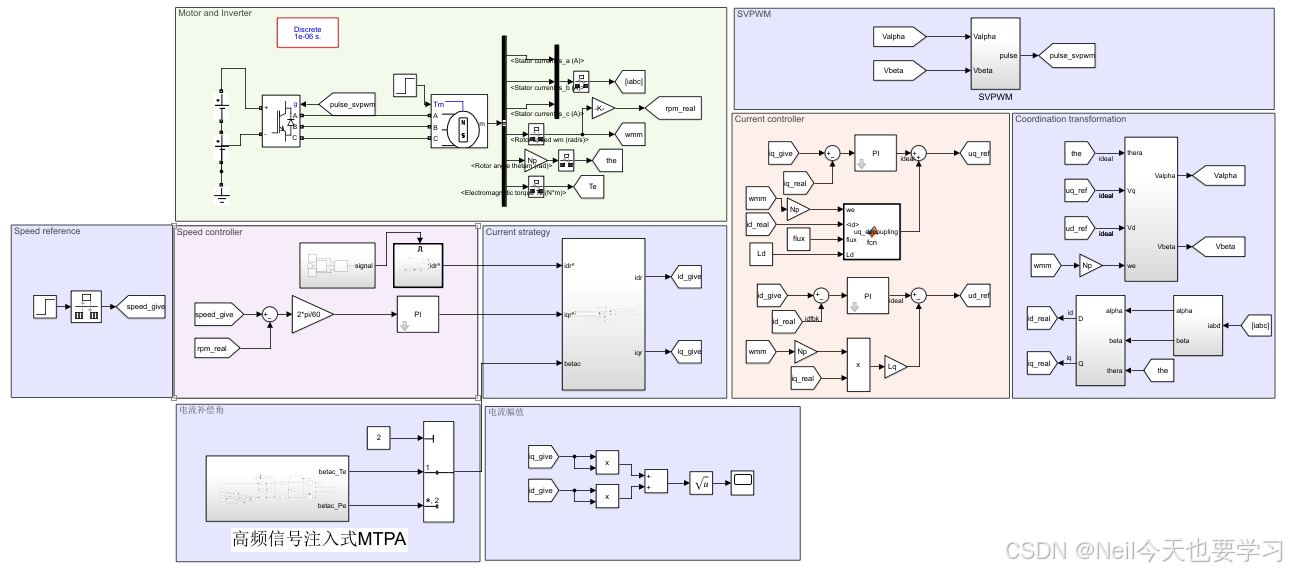
二、仿真模型
在MATLAB/simulink里面验证所提算法,搭建高频信号注入式MTPA仿真。采用和实验中一致的控制周期1e-4,电机部分计算周期为5e-7。仿真模型如下所示:
由于本文的高频信号注入式MTPA轨迹实时跟踪方法只适用于转速、转矩稳态条件。在转速、转矩动态过程中,转矩很可能出现较大的波动,这将使得偏离度 PI 调节器饱和,从而产生过大的矫正角Δδ,影响了 MTPA 控制系统的动态特性。
仿真工况:电机首先根据直接公式法计算出的电流角生成dq轴电流给定信号,0.3s引入电流角误差信号,模拟电机参数变换使得直接公式法生成的角度错误。0.5s注入高频信号,0.6s启动高频注入式MTPA电流补偿角计算,0.8s停止注入。
仿真图中Multiport Switch模块是用来实现直接测量转矩方法和功率间接测量转矩方法之间的切换
2.1 转速
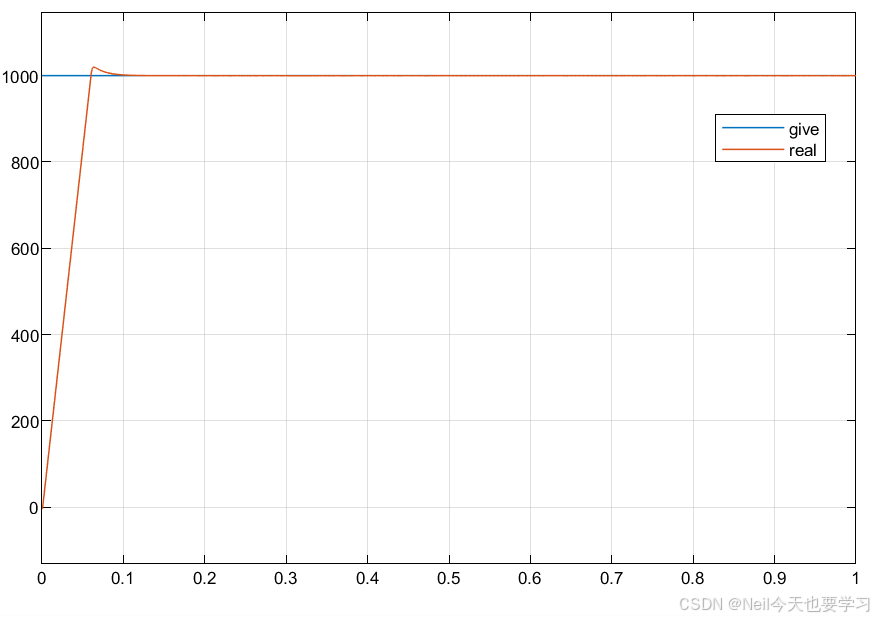
可以看出即使在运行过程中突变电流角,电机转速依然保持平稳,证明转速环性能良好,电流角主要影响电流分配情况。在0.5s-0.8s运行高频注入式MTPA过程,电机转速波动很小,证明该算法稳定性良好。
2.2 dq轴电流
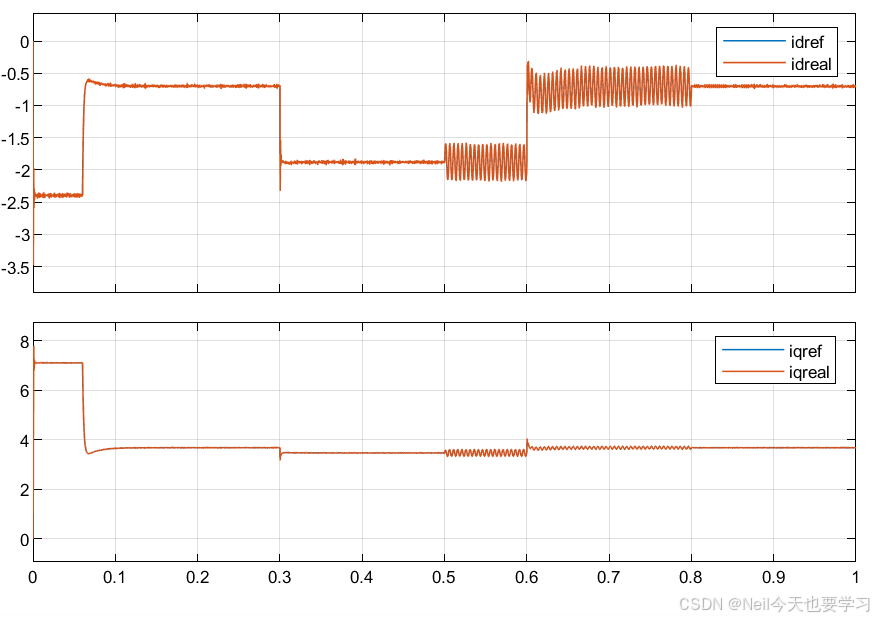
可以看出在0.5s-0.8s间,注入的高频电流信号出现在了dq轴电流上,由于注入信号频率在电流环带宽内,所以实际电流值可以很好的跟踪包含高频信号的给定值
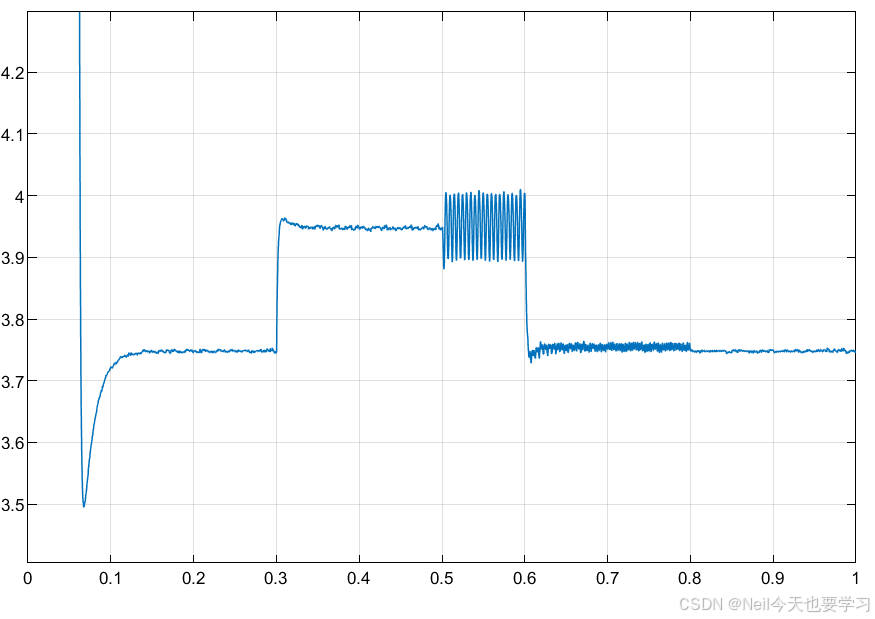
2.3 电磁转矩
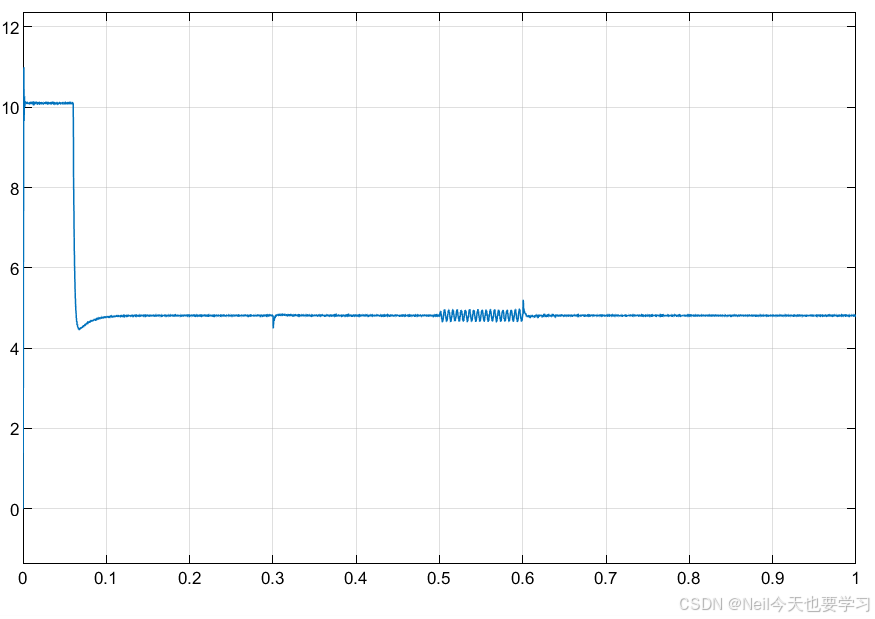
在0.5s注入高频电流后,电磁转矩中存在明显的同频率转矩波动,在0.6启动算法后,同频率转矩波动消失,证明电机恢复至MTPA轨迹。从理论上来说,此时电磁转矩中应该存在二倍频的波动,但是由于这个波动幅值较小,从波形中很难看出。
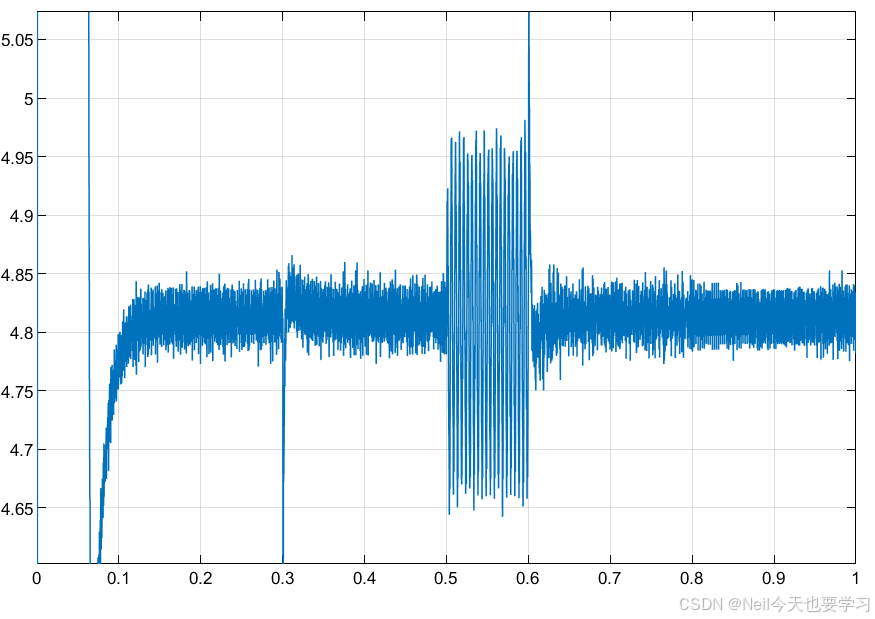
2.4 电流幅值
从电流幅值波形也可以看出,高频注入式MTPA可以有效校正MTPA,实现输出相同转矩下电流幅值最小。并且在0.6s-0.8s算法完成补偿后注入高频电流会导致电流幅值增加,进而导致一定的损耗。
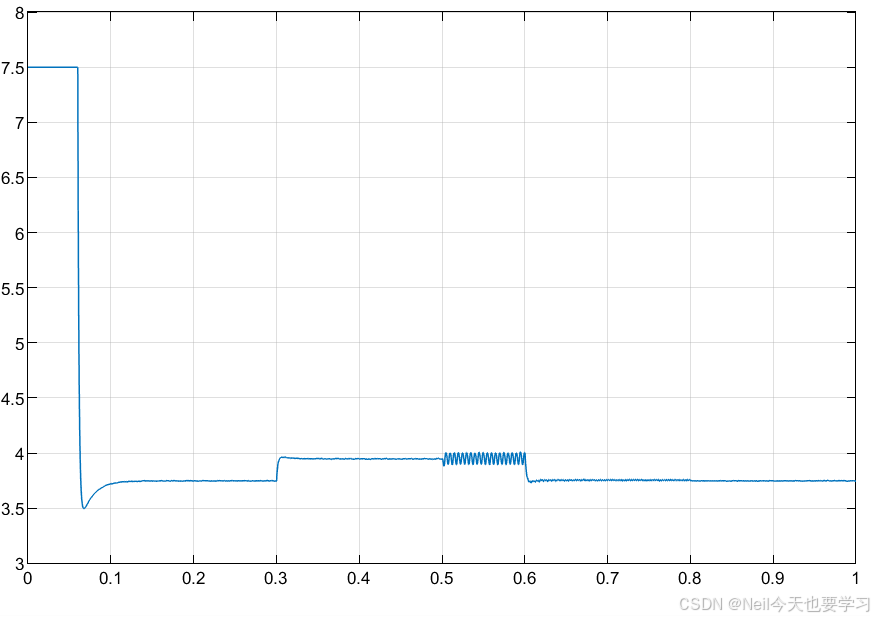
2.5电流角
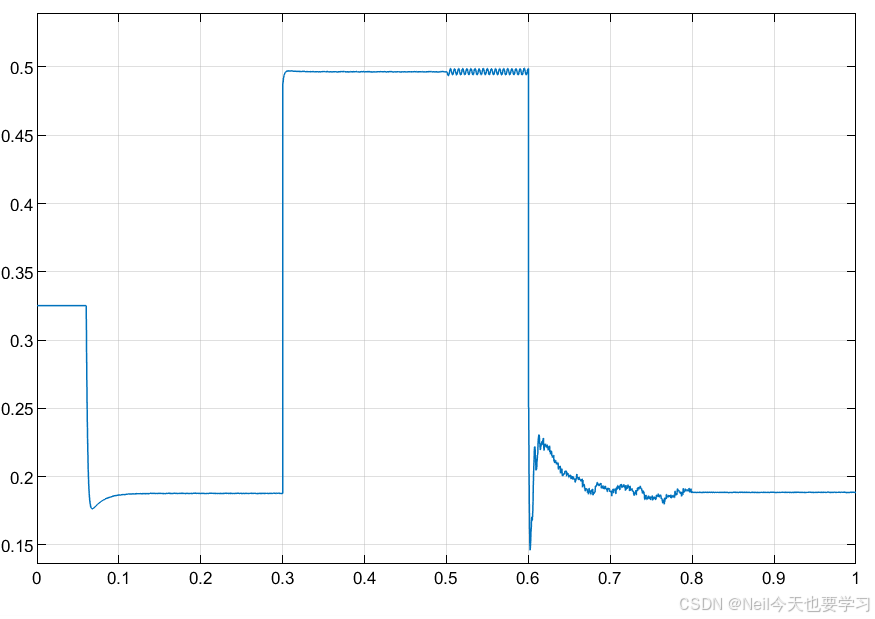
可以看出启动算法后,电流角迅速跟踪到MTPA轨迹,实现良好的电流分配效果。因为转矩补偿角的生成经过了一个PI调节器,这个仅仅粗调,对效果不满意的话,可以更加细致的调整参数。
注入信号使电流矢量绕着实际稳态工作点周围摆动,从而引入不期望的转矩脉动。由于每个 MTPA 变化是很慢的,因此对于每个工作条件来说,这个过程以很低的重复率重复。因此,建议非连续注入,只在跟踪阶段产生转矩脉动。
结果表明,该方法不依赖于对电机参数特性的计算及预估,具有良好的抗干扰能力。但是,该方法将产生的转矩脉动分量∆Te1与id^(注入高频电流)对比相位关系,以此来调整δ增大或者减小,因此该方法需要利用实际脉动分量参与控制,导致无法避免存在实际转矩脉动的问题。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









