







这篇文章记录一下SG90舵机的调试。
一、SG90舵机控制原理
- SG90共3个引脚,分别为:VCC、GND、信号。查看手册SG90舵机手册,想要控制舵机转动就需要给舵机一个周期为20ms(50Hz频率)的PWM脉冲信号。信号的前一段为高电平,持续时间0.5ms到2.5ms,代表转动角度0-180或者360度,后半段为低电平。

二、Stm32CubeMx配置
1、RCC开启外部高速时钟(略)
2、配置STLink调试口(略)
3、配置串口方便调试输出(略)
4、配置工程名、生成路径,之后生成工程(略)
(1-4步的基础配置可以参考前面的文章《STM32基础工程模板创建》)
5、配置TIM定时器,产生PWM信号
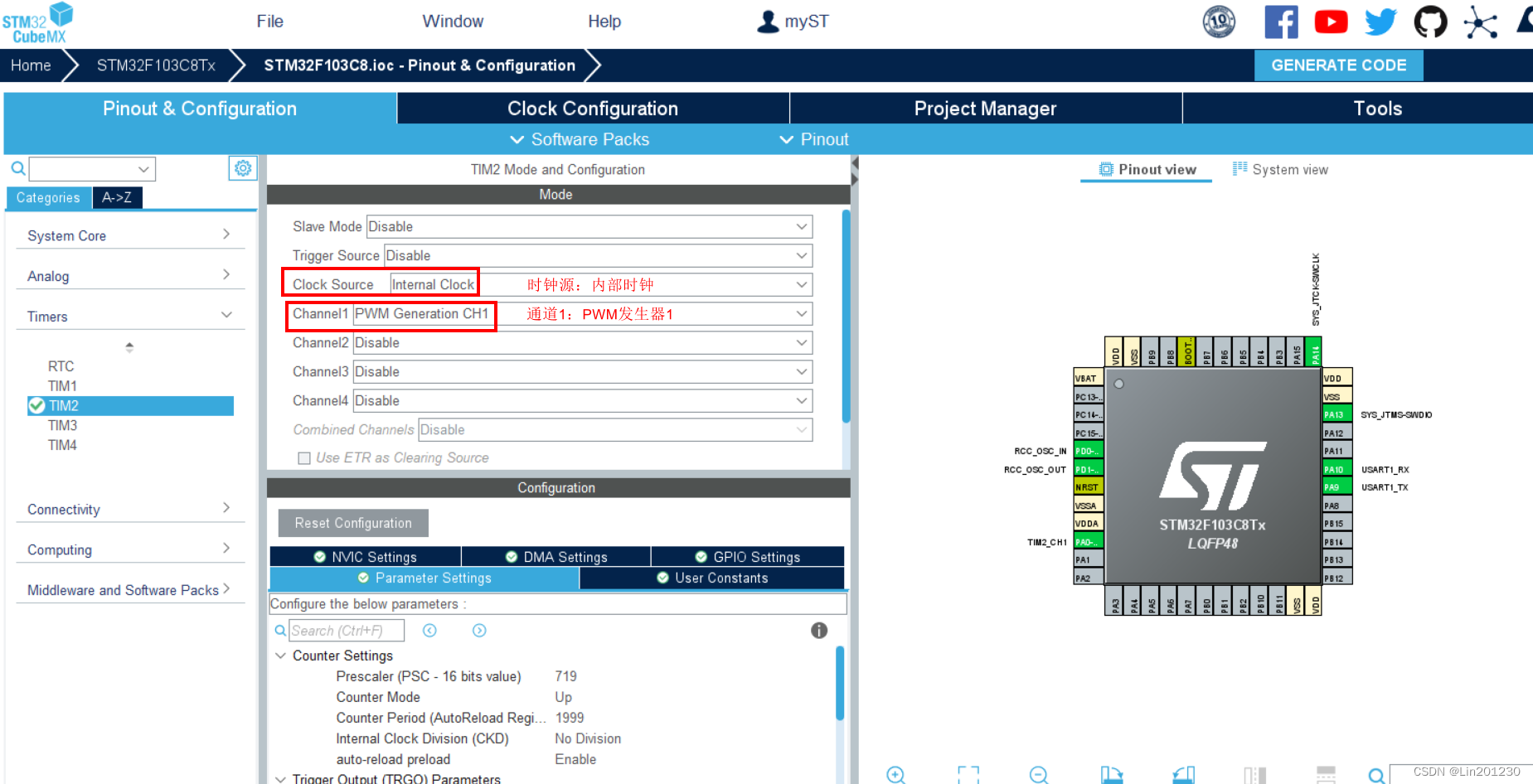

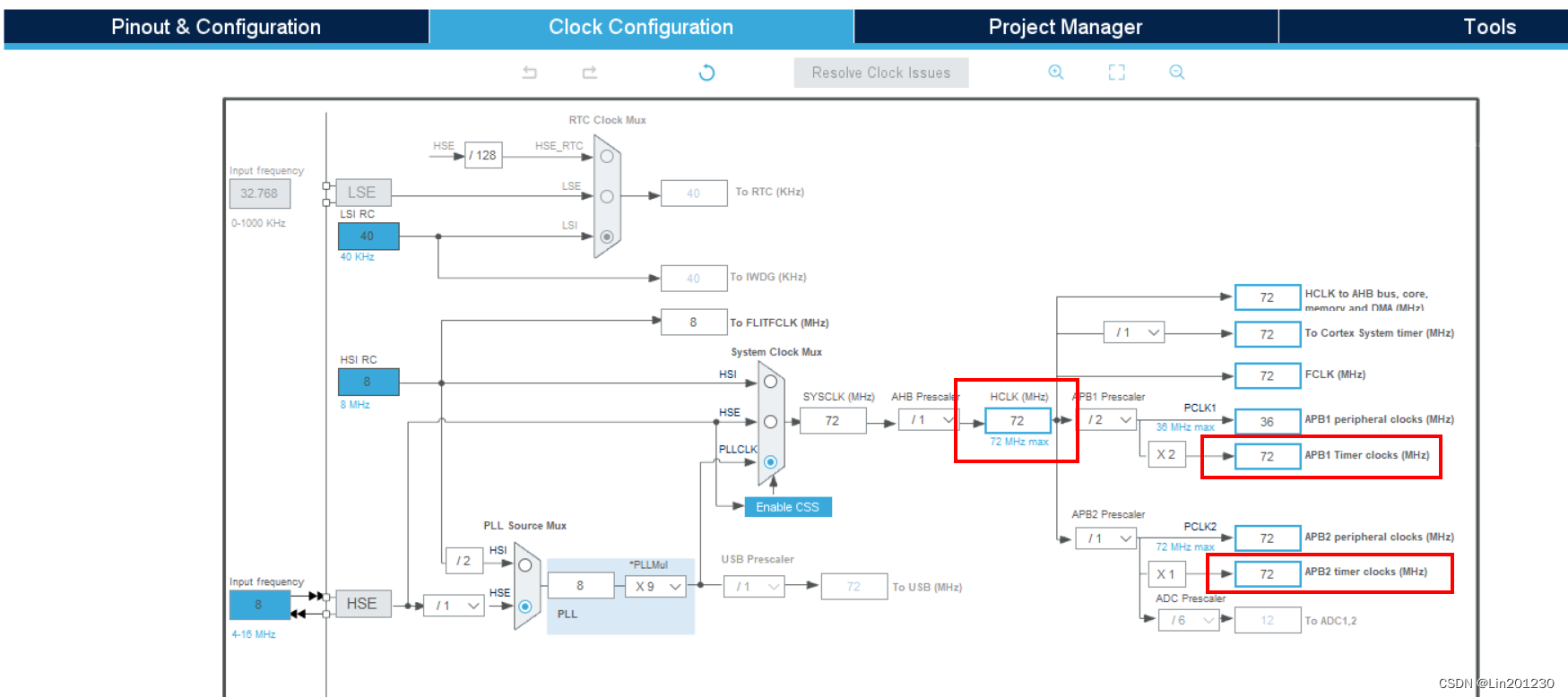
参数配置说明: 查阅芯片手册和时钟树可知,定时器是挂载在APB1/APB2外设上的,我们的APB1/APB2外设时钟频率为72Mhz。要想产生50HZ的PWM给舵机用,就需要对定时器进行相应的分频,使Timer定时器能产生50Hz的信号。
公式: 50Hz = (Timer外设时钟 )/(预分频系数)/(计数周期) = (72000000)/(720-1)/(2000-1)
注: 重装需要1个时钟周期,所以-1
三、Keil代码编写
代码一:
int main(void)
{
uint16_t i=0;
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM2_Init();
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_1); //定时器初始化
while (1)
{
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_1,50); //转到0°
HAL_Delay(1000);
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_1,100); //转到45°
HAL_Delay(1000);
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_1,150); //转到90°
HAL_Delay(1000);
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_1,200); //转到135°
HAL_Delay(1000);
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_1,250); //转到180°
HAL_Delay(1000);
}
}
代码二:
int main(void)
{
uint16_t i=0;
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM2_Init();
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_1); //定时器初始化
while (1)
{
for(i=50; i<250; i++)
{
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, i);
HAL_Delay(5);
}
HAL_Delay(2000);
for(i=250; i>50; i--)
{
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, i);
HAL_Delay(5);
}
HAL_Delay(2000);
}
}
四、硬件连接
STM32 SG90舵机
5V 《----------------------》红线
GND 《----------------------》棕线
PA1 《-----------------------》黄线
注意:SG90工作电压为4.8V-6V,开发板有USB口的话接上USB,防止舵机供电不足不工作。
五、运行效果
- 效果1:
- 效果2:















 5647
5647

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









