






车道线数据集统计
参考连接: https://blog.csdn.net/weixin_42234696/article/details/127257501
数据下载地址: https://opendatalab.org.cn/
(opendatalab搜索车道线,有很多公开分享的车道线的数据集)
1.1. TuSimple
拍摄介绍:主要采集区域国外高速公路上(安装在卡车的靠近车牌的位置),图像未畸变。
数据介绍:位于高速路,天气晴朗,车道线清晰;车道线以点来标注;车道线实际上不只是道路上的标线,虚线被当作了一种实线做处理的。这里面双实线、白线、黄线这类信息也是没有被标注的。
图片大小:1280x720,图片数量:6408(训练集:3626 ;验证集:2782)。
标签格式:json,点形式标注。
已下载使用

1.2. CULane
拍摄介绍:由不同驾驶员操控的六辆不同的轿车所安装的摄像头采集的,拍摄地点为北京城区道路和高速公路。该数据集采集了超过55小时的视频数据。
数据介绍:包含拥挤,黑夜,无线,暗影等八种难以检测的情况,最多标记4条车道线;
图片大小:1640x590;图片数量:133235(训练集:88880,验证集:9675,测试集:34680)。
标签:车道标注的就是当前车道和左右两车道(最多),不区分虚实线。
标签格式:txt点坐标格式。
已下载使用
1.3. BDD100k
拍摄介绍:视频分别是从美国不同的地方收集的,涵盖了美国4个区的不同的天气状况,包含晴天、阴天和雨天以及在白天和夜天的不同时间。轿车前置摄像头,所见即所得,城市道路和高速公路。数据集由100000个视频组成,每个视频大约40秒,720P,30fps,总时间超过1,100小时。BDD100K数据集在每个视频的第10秒抽取关键帧。
标签: 二维8类别车道线。(不提供车道实例的注释——在每一帧上,同一类型的多个车道没有分开并使用一个标签进行注释。)包括路缘石, 人行横道, 双白, 双黄, 双其他颜色, 单白, 单黄, 单其他颜色8个主要类别。
图片大小:1280x720;图片数量:10万张(训练:70000,验证:10000,测试:20000)。
标签格式:json格式。

不可使用原因:1.双线标注,类别未作区分。2.许多横向标注的车道线3.虚线标注的线段坐标未属于同一列表,仅将其并列。
目前想到的解决办法:将bdd100k车道线标签转成Labelme标注工具支持的json格式,用标注工具进行修正后再使用,但此方法工作量巨大。
1.4. ApolloScape
数据介绍:包含了35个车道标记类别(可合并),其中车道类别10种,主要是国内的城市道路,
140k张图片,特点是车道线以掩码的形式标注;
图片大小:3384x2710;图片数量:113653
标签格式:png格式。
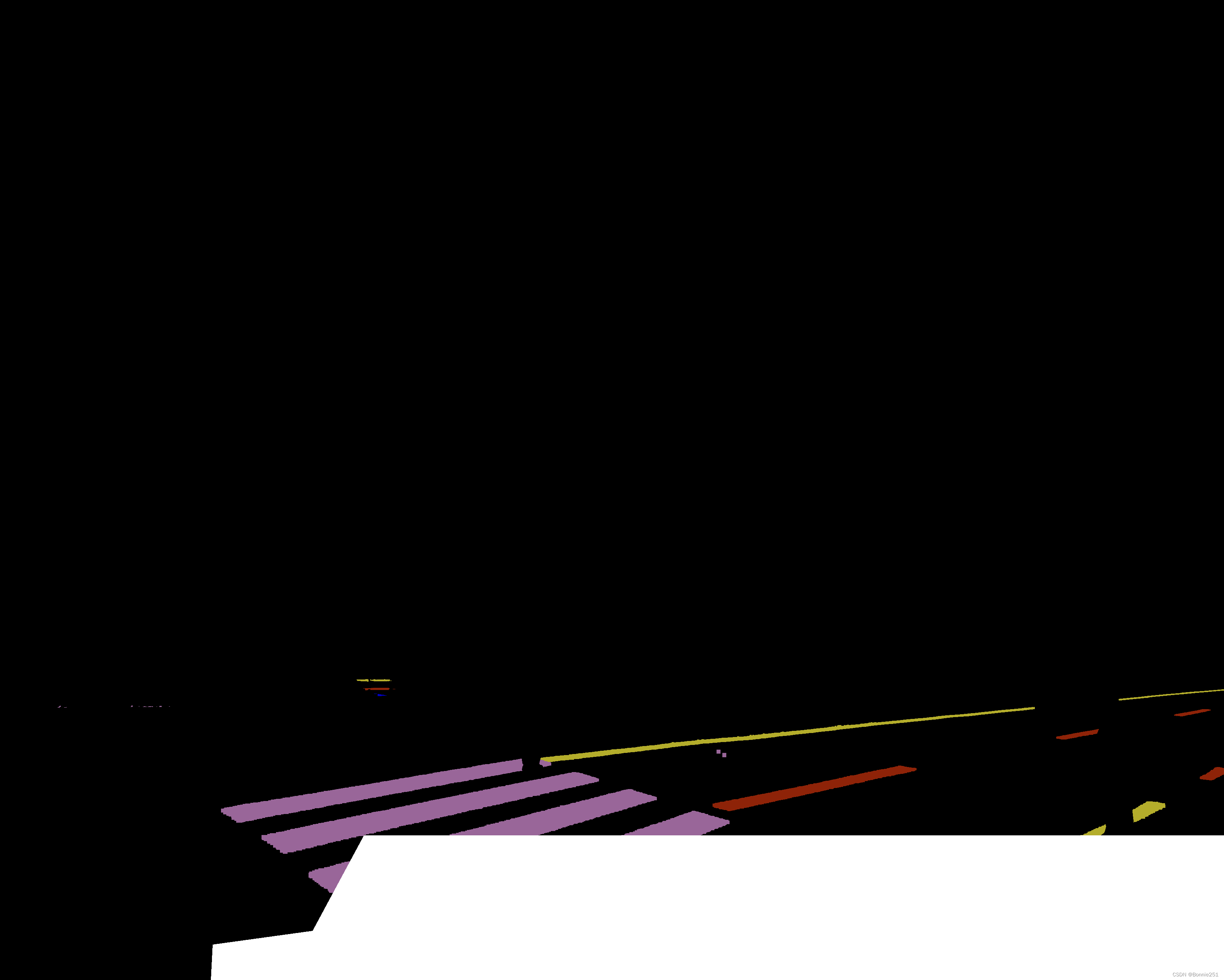
不可使用原因:以掩码的形式标注,无法将同一条车道线的坐标划到一个列表中。
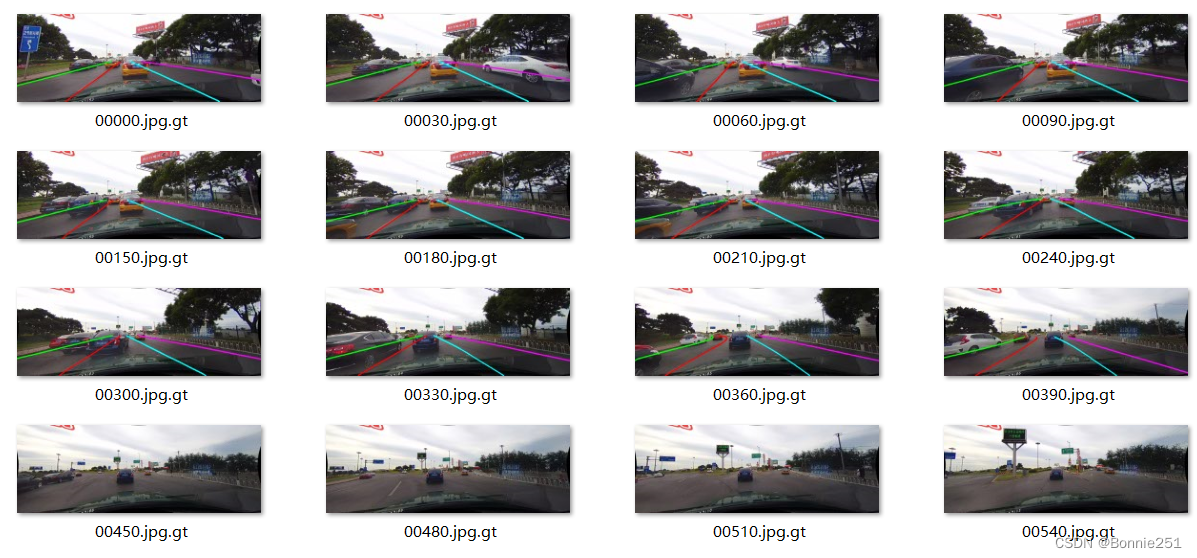
1.5. CurveLanes
特点:华为弯道检测数据集,采用三次样条曲线手动标注所有车道线,包括很多较为复杂的场景,如S路、Y车道,还有夜间和多车道的场景。
图片大小:2650x144,数量:分为训练集10万张,验证集2万张,测试集3万张;
标签格式:json格式。
已下载使用
1.6. LLAMAS
特点:使用了 14 条高速公路记录,每条大约 25 公里,收集传感器数据以在我们的数据集中标记图像。国外高速。
标签:博世公司车道标记数据集,标注不是人工标注,而是高精地图生成的,全是高速场景。超过100米的注释,摄像头大致位于汽车外部的车牌处。彩色图额外提供了原图的灰度图,总共4类。
图片大小:1276 x 717,图片数量: 79113 (训练集:58269 验证集:20844 测试集:20929(无标签))
标签:左虚车道线,右虚车道线,左实车道线,右实车道线。
标签格式:以点json格式(三维坐标)。

暂未下载使用
1.7. VPGNet
拍摄介绍: 在恶劣的天气条件下,在车内(中间)安装了一个摄像头。首尔市中心拍摄城市交通场景,摄像头可能拍到雨刮器。
数据类型:包含白天(非雨天、雨天、大雨天)、夜晚的数据,同时包含了各种车道线类型,三周驾驶,以及其他不同类型的车道标识(左转箭头、直行箭头、斑马线等)。
图片大小:1288×728,图片数量:20k张,21097张;
标签格式及类别:标签以及原图均为mat格式,包含了各种车道线类型,以及其他不同类型的车道标识(左转箭头、直行箭头、斑马线等等);
手动标注车道和道路的拐角点。角点连接起来形成一个多边形形成每个对象的像素级掩码注释。

未使用原因:暂不知道如何处理mat格式图像和标签。
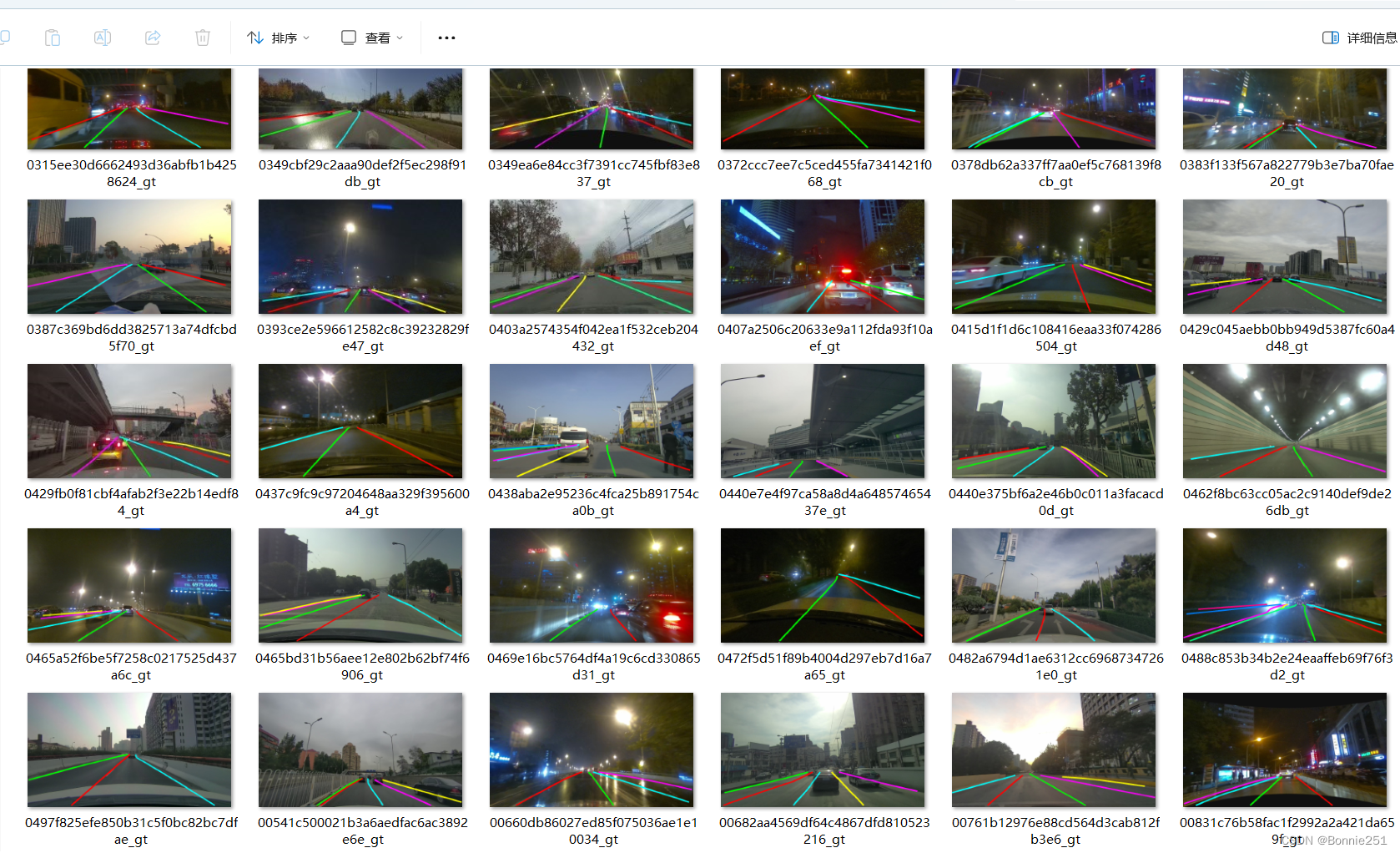
1.8. VIL-100
拍摄介绍:包含100个视频,其中97个视频是通过车载前置摄像机拍摄,3个则从网络上获取。涵盖正常路况、拥挤路况、弯道、受损道路、阴影、道路标志、强光、雾霾、夜晚和十字路口10类经典场景。我们将所有视频的帧率从最初的30fps下采样到10fps,对每帧中的所有车道线提供了实例级标注。
图片大小:1920x1080,1280x720,960x480,统一处理成1280x720;图片数量:10000。
标签:总共有10个类别的车道线,(单白实心、单白虚线、单黄实心、单黄虚线、双白实心、双黄实心、双黄虚线、双白实心虚线、双白虚线实线、双实白黄。)
标签格式:json格式,处理成txt点坐标格式。

已下载使用
1.9. SDLane
视频拍摄于韩国,捕捉高速公路和城市地区的挑战性场景。手动注释了每个场景道路上所有可见车道标记的2D车道几何形状。此外,为了更好地推断自我车辆的位置,注释了每个车道相对于最左侧车道标记的索引。
图片大小:1920 x 1208,图片数量:34310(训练集:30515,测试集:3795)。
标签格式:json格式。

未使用原因:韩国的车道线、标注方法与国内的有冲突。
1.10. Caltech
一共约1.2k张图片,场景比较简单,且视角较好;图片大小:640x480;
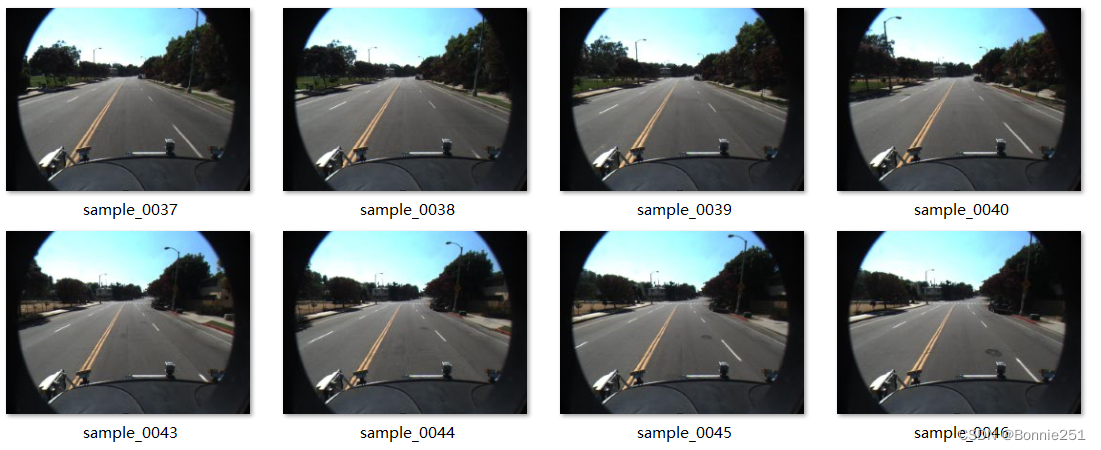
无法使用原因:图像与其他数据集图像有所不同。
1.11. OpenLane
OpenLane包含20万帧、超过88万条实例级车道、14个车道类别(单白色虚线、双黄色实体、左/右路边等),以及场景标签和路线邻近目标(CIPO)注释,以鼓励开发车道检测和更多与工业相关的自动驾驶方法。
暂未使用。














 692
692











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









