







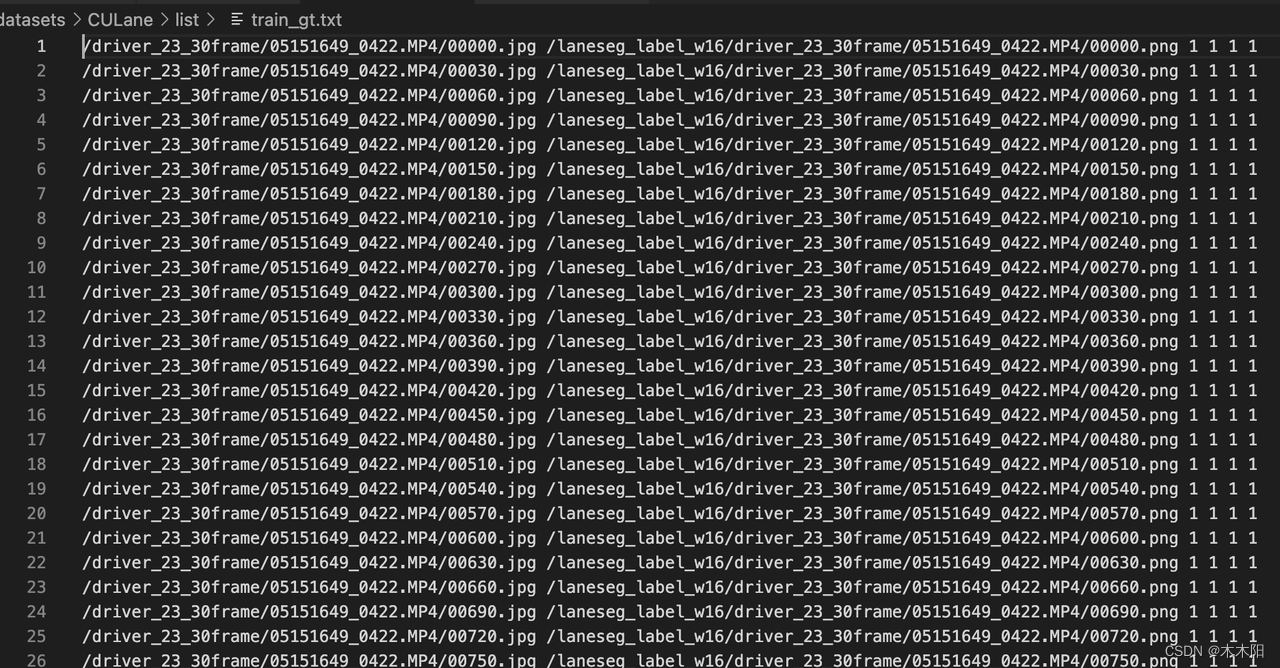
一、CULane 数据集
详情看下面这个链接:
https://blog.csdn.net/dream_loverm/article/details/124675252
结论:目前我方数据集转化为这个难度较大,这个数据集固定4条车道线,然后每根车道线对应一个0 or 1 。
第一个路径对应的是原图,第二个对应的是语义分割的label ,1 1 1 1对应的是这个lines是否存在
二、TuSimple 数据集
详细看下面这个链接:
https://blog.csdn.net/qingfengxd1/article/details/108738651
结论: TuSimple数据集采集的方式为,等hight采样,无效点采用-2表示。并且也采用的是4根线段,所以比较容易表示。对于星尘的数据集,需要考虑以下几点:
1、每根线的长度不一样,不像TuSimple是固定的4根线段,也就是label是动态的,这个首先得去确定源码支不支持label size不一样,其次再对这个地方进行生成。

三、llamas 数据集
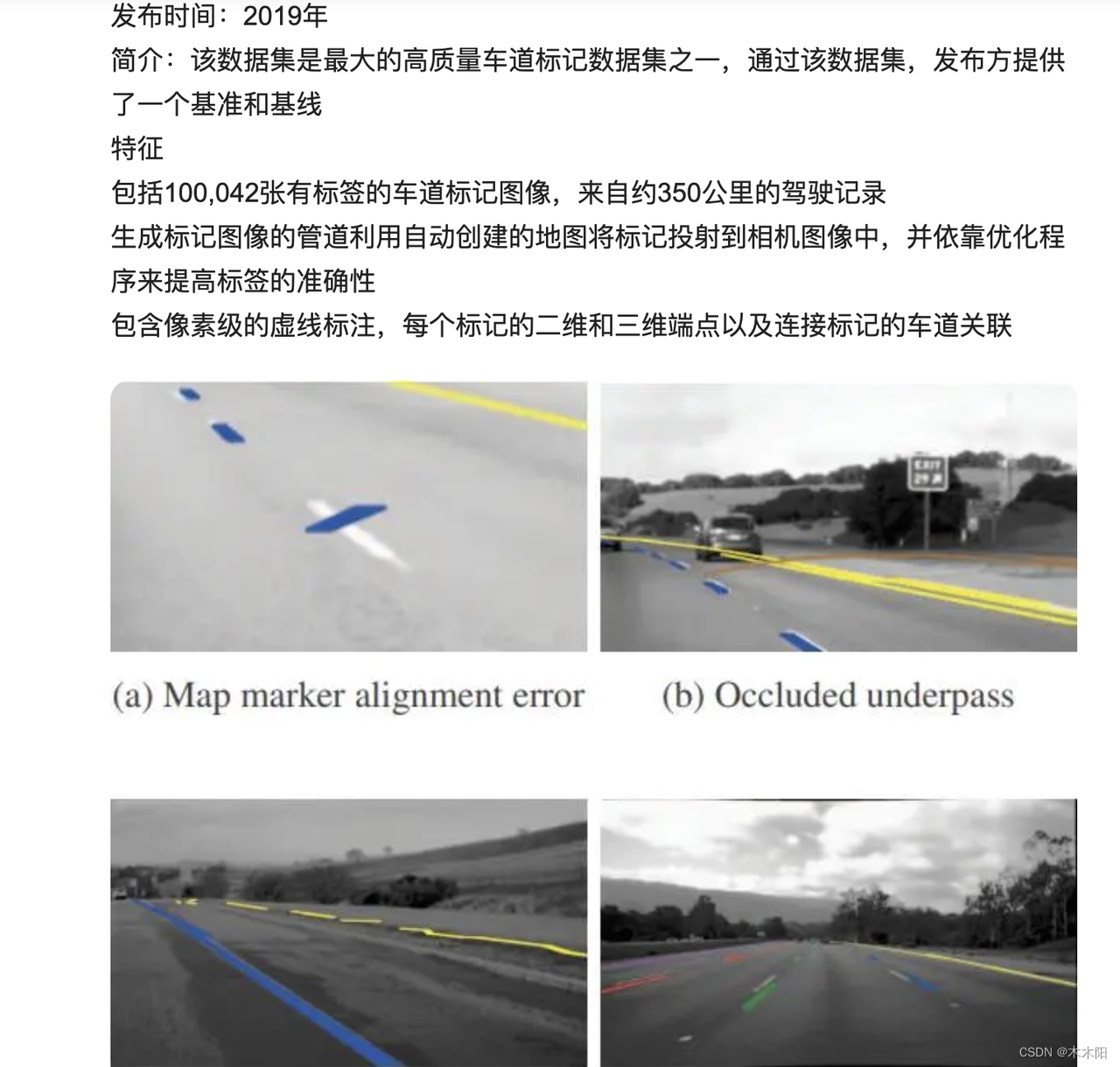
这个三维端点不太清楚怎么获得,暂时存疑,所以不太清楚如何转换为这个
{“image_name”: “1418941032_0448046000”, “projection_matrix”: [[1381.9564208984375, 0, 648.1651000976562], [0, 1394.720703125, 369.2019348144531], [0, 0, 1]], “lanes”: [{“lane_id”: “l2”, “markers”: [{“lane_marker_id”: “270203117953842939049275513852704429158”, “world_start”: {“x”: “-9.17842867663594042”, “y”: “1.276180260639949271”, “z”: “19.78747432228004399”}, “pixel_start”: {“x”: “7”, “y”: “459”}, “world_end”: {“x”: “-9.574295821250416338”, “y”: “1.141203201375901699”, “z”: “69.23138637881493196”}, “pixel_end”: {“x”: “457”, “y”: “392”}}]}, {“lane_id”: “l1”, “markers”: [{“lane_marker_id”: “270201420466542939461654533852673098343”, “world_start”: {“x”: “-5.640150496445136774”, “y”: “1.224805407132950608”, “z”: “12.02422712101831159”}, “pixel_start”: {“x”: “0”, “y”: “511”}, “world_end”: {“x”: “-5.671875610365532339”, “y”: “1.21751828957349062”, “z”: “14.87058008922031149”}, “pixel_end”: {“x”: “121”, “y”: “483”}}, {“lane_marker_id”: “270201801812042939350571883852682042316”, “world_start”: {“x”: “-5.776278588105924428”, “y”: “1.19327277597039938”, “z”: “25.23400457616662607”}, “pixel_start”: {“x”: “331”, “y”: “435”}, “world_end”: {“x”: “-5.819566922611556947”, “y”: “1.181951870210468769”, “z”: “29.63227527443086728”}, “pixel_end”: {“x”: “376”, “y”: “424”}}, {“lane_marker_id”: “270202158360442939245164503852690538246”, “world_start”: {“x”: “-5.881201529060490429”, “y”: “1.174608948640525341”, “z”: “39.11637130187591538”}, “pixel_start”: {“x”: “440”, “y”: “411”}, “world_end”: {“x”: “-5.908810803317464888”, “y”: “1.164061642251908779”, “z”: “43.63200594199588522”}, “pixel_end”: {“x”: “461”, “y”: “406”}}, {“lane_marker_id”: “270202521760642939139313533852699103642”, “world_start”: {“x”: “-5.999603916308842599”, “y”: “1.121248398907482624”, “z”: “53.44266462180530652”}, “pixel_start”: {“x”: “493”, “y”: “398”}, “world_end”: {“x”: “-6.029725985252298415”, “y”: “1.102783267386257648”, “z”: “57.72448472952237353”}, “pixel_end”: {“x”: “503”, “y”: “395”}}]}, {“lane_id”: “l0”, “markers”: [{“lane_marker_id”: “270201086893742939469124233852674495211”, “world_start”: {“x”: “-1.966717946459539235”, “y”: “1.198973130434751511”, “z”: “9.324081404076423496”}, “pixel_start”: {“x”: “356”, “y”: “548”}, “world_end”: {“x”: “-2.019094379735179245”, “y”: “1.1896440414711833”, “z”: “14.32957550737774”}, “pixel_end”: {“x”: “453”, “y”: “484”}}, {“lane_marker_id”: “270201455055742939362496123852683064815”, “world_start”: {“x”: “-2.147760815336368978”, “y”: “1.160993026569485664”, “z”: “23.9819734938791953”}, “pixel_start”: {“x”: “524”, “y”: “436”}, “world_end”: {“x”: “-2.186756837065331638”, “y”: “1.157004001550376415”, “z”: “28.49498701369157061”}, “pixel_end”: {“x”: “542”, “y”: “425”}}, {“lane_marker_id”: “270201817950242939255728153852691685902”, “world_start”: {“x”: “-2.262410187278874218”, “y”: “1.126942981965839863”, “z”: “38.09459001146024093”}, “pixel_start”: {“x”: “566”, “y”: “410”}, “world_end”: {“x”: “-2.285242946236394346”, “y”: “1.121882169507443905”, “z”: “42.6891942517249845”}, “pixel_end”: {“x”: “574”, “y”: “405”}}, {“lane_marker_id”: “270202180671342939148515013852700382878”, “world_start”: {“x”: “-2.329018636955879629”, “y”: “1.080307002179324627”, “z”: “52.46358906751265749”}, “pixel_start”: {“x”: “586”, “y”: “397”}, “world_end”: {“x”: “-2.35062405199278146”, “y”: “1.067873405292630196”, “z”: “56.96271858451655135”}, “pixel_end”: {“x”: “591”, “y”: “395”}}]}, {“lane_id”: “r0”, “markers”: [{“lane_marker_id”: “270200891767642939439369633852678859969”, “world_start”: {“x”: “1.511787454015575349”, “y”: “1.127415463328361511”, “z”: “14.49277444969629869”}, “pixel_start”: {“x”: “792”, “y”: “477”}, “world_end”: {“x”: “1.476782026351429522”, “y”: “1.125354284420609474”, “z”: “18.74393852980574593”}, “pixel_end”: {“x”: “757”, “y”: “452”}}, {“lane_marker_id”: “270201265410042939329989343852687695364”, “world_start”: {“x”: “1.388576400349847972”, “y”: “1.093975610099732876”, “z”: “28.78852799668675289”}, “pixel_start”: {“x”: “714”, “y”: “422”}, “world_end”: {“x”: “1.361028664628975093”, “y”: “1.079627777449786663”, “z”: “33.29213927633827552”}, “pixel_end”: {“x”: “704”, “y”: “414”}}, {“lane_marker_id”: “270201614336542939226854613852696026269”, “world_start”: {“x”: “1.310822890722192824”, “y”: “1.061314404010772705”, “z”: “42.76681172376265749”}, “pixel_start”: {“x”: “690”, “y”: “403”}, “world_end”: {“x”: “1.281623214366845787”, “y”: “1.050229958258569241”, “z”: “47.00124442804371938”}, “pixel_end”: {“x”: “685”, “y”: “400”}}, {“lane_marker_id”: “270201982144242939119335113852704724132”, “world_start”: {“x”: “1.199930842150934041”, “y”: “1.021225695498287678”, “z”: “57.00564336305251345”}, “pixel_start”: {“x”: “677”, “y”: “394”}, “world_end”: {“x”: “1.16922549216542393”, “y”: “0.9949798285961151123”, “z”: “61.31102764693787321”}, “pixel_end”: {“x”: “674”, “y”: “391”}}]}, {“lane_id”: “r1”, “markers”: [{“lane_marker_id”: “270201888280542939056620753852711794892”, “world_start”: {“x”: “5.14013709238937988”, “y”: “1.095308891355230019”, “z”: “11.79114501030707629”}, “pixel_start”: {“x”: “1250”, “y”: “498”}, “world_end”: {“x”: “4.75025037385057658”, “y”: “0.934947737492620945”, “z”: “70.10763340204721317”}, “pixel_end”: {“x”: “741”, “y”: “387”}}]}, {“lane_id”: “r2”, “markers”: [{“lane_marker_id”: “270200831966142939241180523852699482134”, “world_start”: {“x”: “9.794649272807873785”, “y”: “1.066788255237042904”, “z”: “43.35462083661695942”}, “pixel_start”: {“x”: “960”, “y”: “403”}, “world_end”: {“x”: “9.904868035693652928”, “y”: “1.077992708422243595”, “z”: “46.0822970601147972”}, “pixel_end”: {“x”: “945”, “y”: “401”}}]}, {“lane_id”: “r3”, “markers”: [{“lane_marker_id”: “270200336069042939381996523852688236765”, “world_start”: {“x”: “10.21936209907289594”, “y”: “1.051807920448482037”, “z”: “25.1285873394808732”}, “pixel_start”: {“x”: “1210”, “y”: “427”}, “world_end”: {“x”: “10.24515139160212129”, “y”: “1.114388470537960529”, “z”: “27.39475580205908045”}, “pixel_end”: {“x”: “1164”, “y”: “425”}}]}]}















 9511
9511











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









