









1 回顾
1.1 节点嵌入
传统机器学习难以应用在图结构上。节点嵌入是将节点映射到d维向量,使得在图中相似的节点在向量域中也相似。存在以下问题:
- 复杂度高,每个节点的嵌入向量都需要单独训练
- 无法获取在训练时没出现过节点的表示向量,无法泛化到新图或新节点
- 无法应用节点自身属性特征信息
1.2 GNN结构
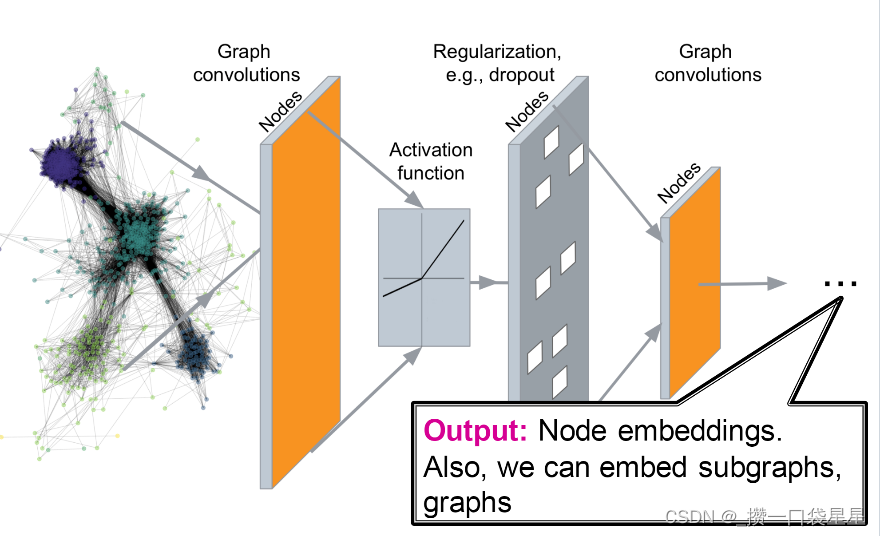
deep graph encoders:即用GNN进行节点嵌入
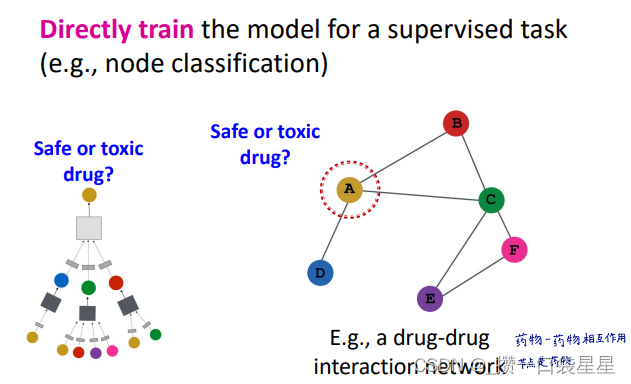
1.3 任务
- 节点分类:预测节点的标签
- 链接预测:预测两点是否相连
- 社区发现:识别密集链接的节点簇
- 网络相似性:度量图/子图间的相似性
2 图深度学习
Assume:
图 G
节点集 V
邻接矩阵 A(二元,无向无权图。这些内容都可以泛化到其他情况下)
节点特征矩阵 X
一个节点 v
v 的邻居集合N(v)
如果数据集中没有节点特征,可以用指示向量indicator vectors(节点的独热编码),或者所有元素为常数1的向量。有时也会用节点度数来作为特征。
2.1 DNN
将邻接矩阵拼和节点特征合并,用DNN训练,缺点:
- 参数多
- 如果图发生变化,邻接矩阵发生变化,无法适配原DNN(我理解是,只能用于原图)
- DNN对输入顺序比较敏感,而图是无序的,相同图不同的顺序图的邻接矩阵不一样,DNN无法处理无序的结构(我们需要一个即使改变了节点顺序,结果也不会变的模型)
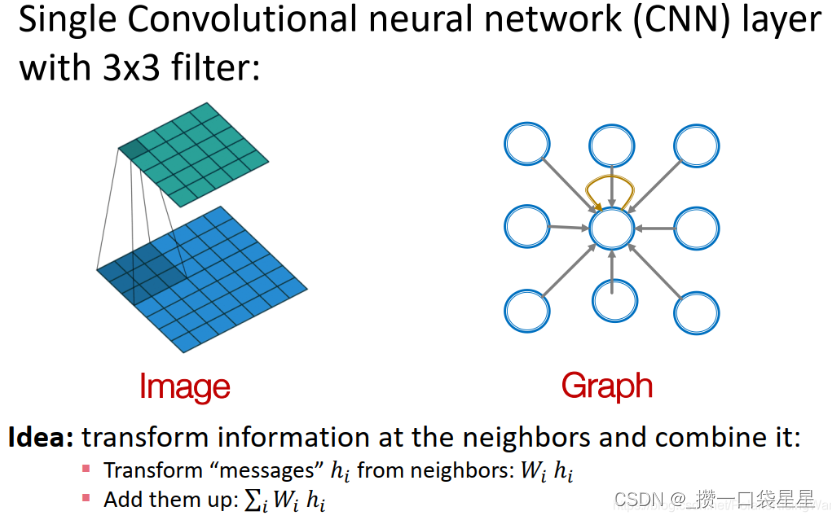
---->借用CNN的思想,将网格上的卷积神经网络泛化到图上,并应用到节点特征数据。但是在CNN中,卷积核大小是固定的,而图的邻居无法用固定大小的卷积核来处理(图上无法定义固定的lacality或滑动窗口且节点顺序不固定),因此用的是聚合(aggregation) 思想。
2.2 聚合思想
1.转换邻居信息,将其加总
2. Graph Convolutional Networks
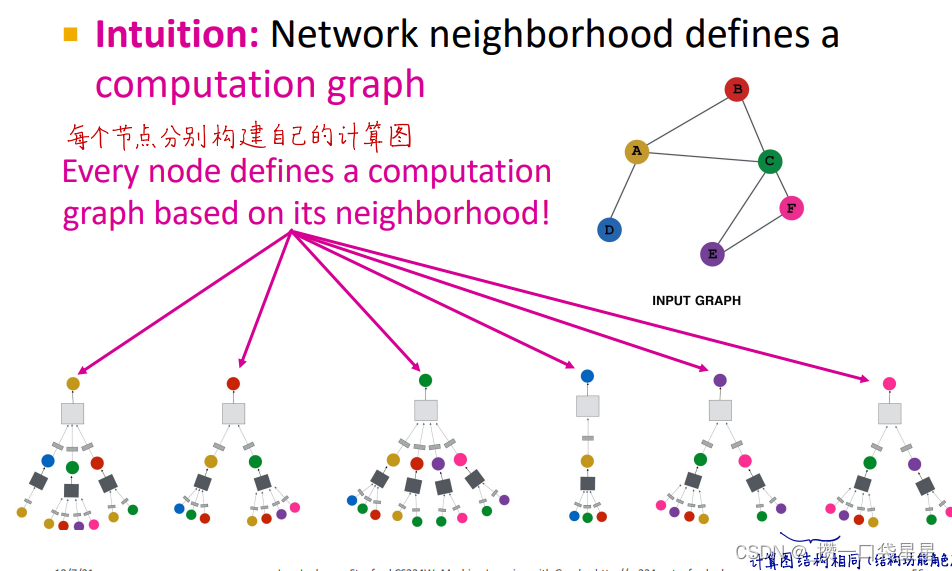
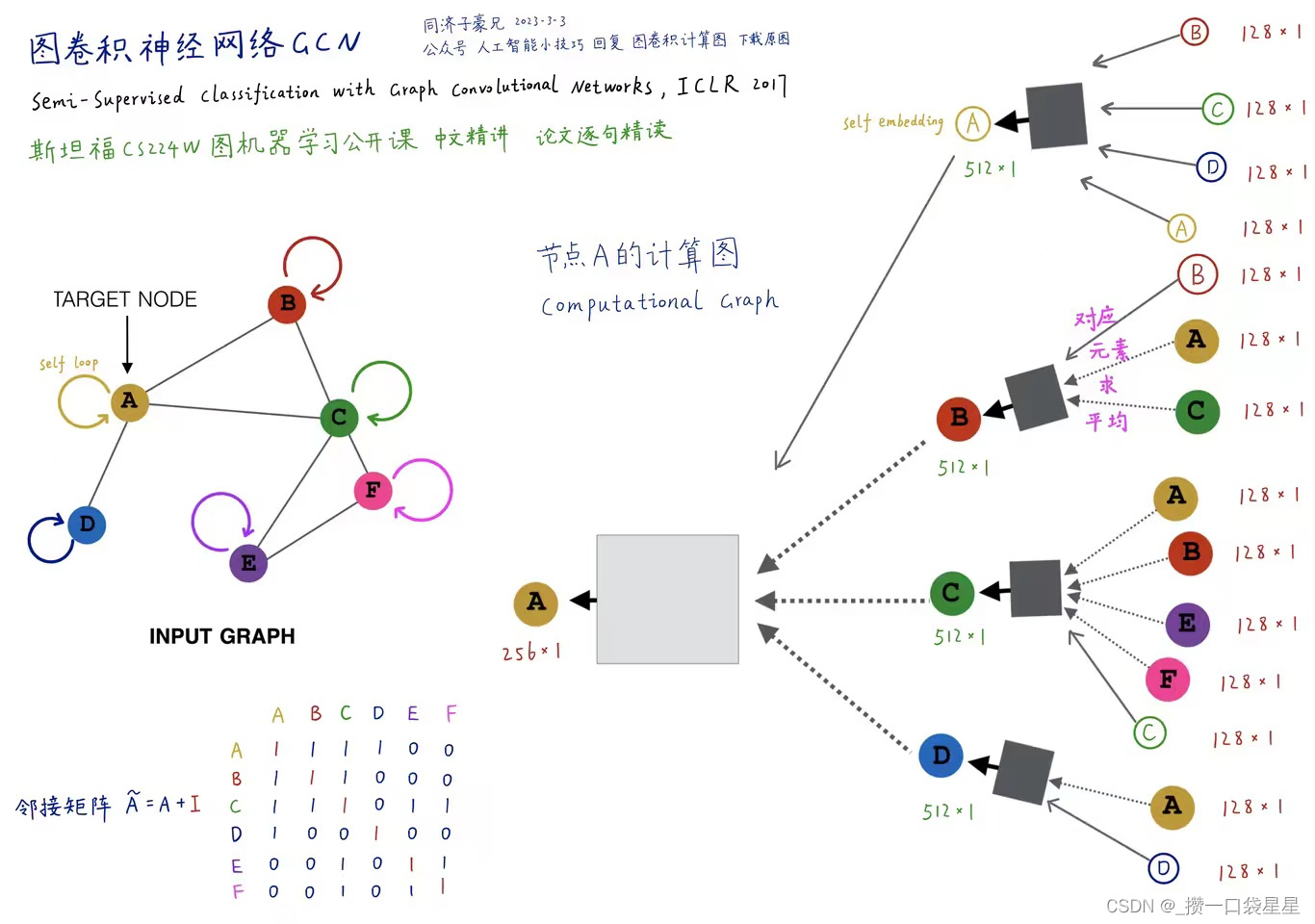
通过节点邻居定义其计算图,传播并转换信息,计算出节点表示(可以说是用邻居信息来表示一个节点)
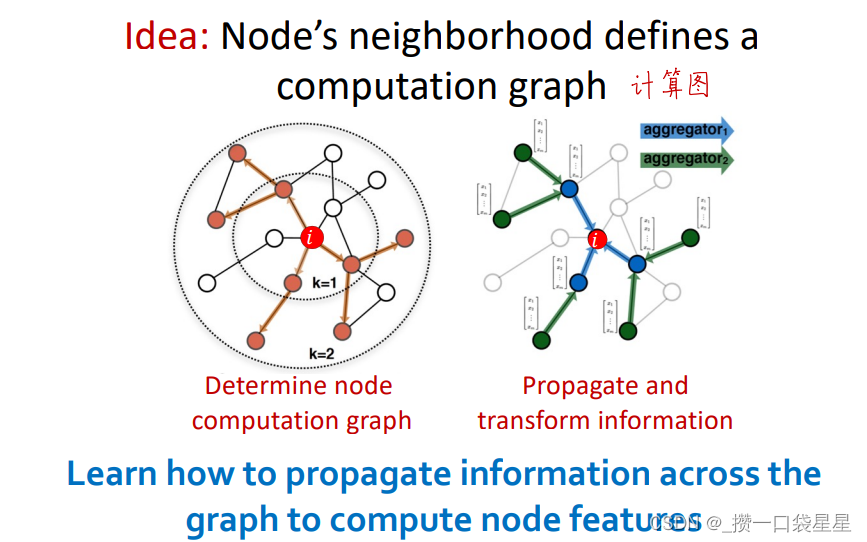
3.核心思想:通过聚合邻居来生成节点嵌入
通过神经网络聚合邻居信息,通过节点邻居定义计算图(它的邻居是子节点,子节点的邻居又是子节点们的子节点……)
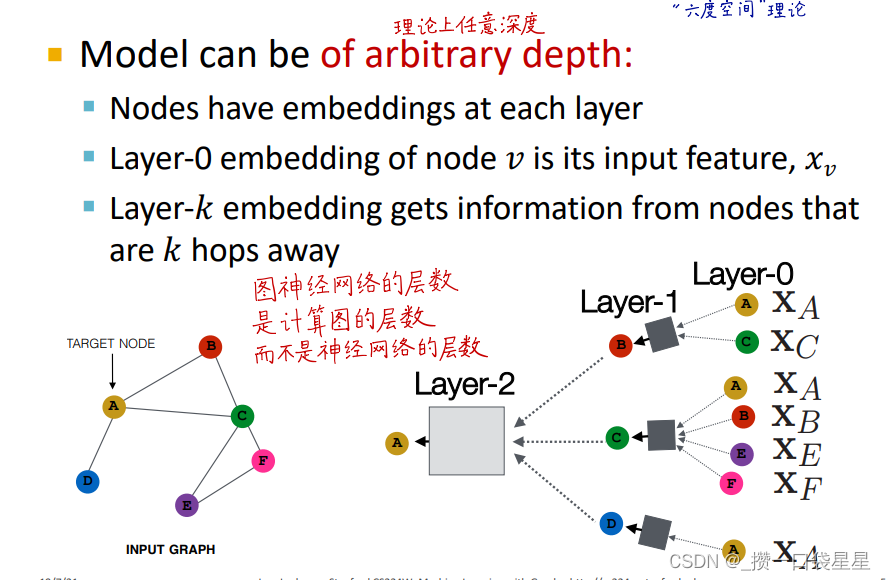
4.深度模型:很多层
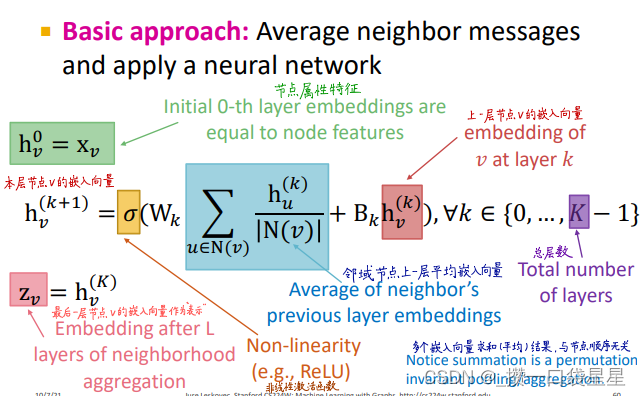
节点在每一层都有不同的表示向量,每一层节点嵌入是邻居上一层节点嵌入再加上它自己(相当于添加了自环)的聚合。
第0层是节点特征,第k层是节点通过聚合k hop邻居所形成的表示向量。
图神经网络的层数是计算图的层数,而不是神经网络的层数。根据六度空间理论,这个层数没必要太大
在这里就没有收敛的概念了,直接选择跑有限步(k)层。
5.邻居信息聚合neighborhood aggregation
盒子里就是一个全连接神经网络
不同聚合方法的区别就在于如何跨层聚合邻居节点信息。neighborhood aggregation方法必须要order invariant或者说permutation invariant
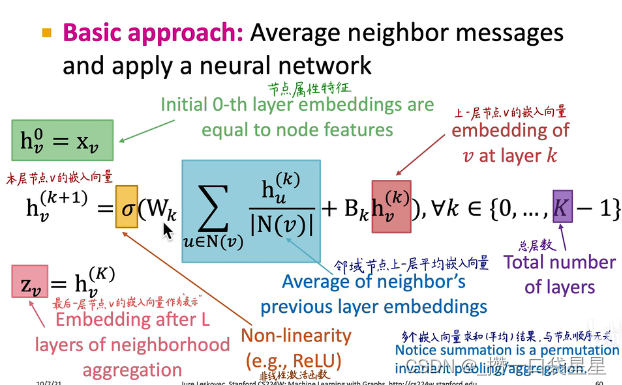
基础方法:从邻居获取信息求平均,再应用神经网络
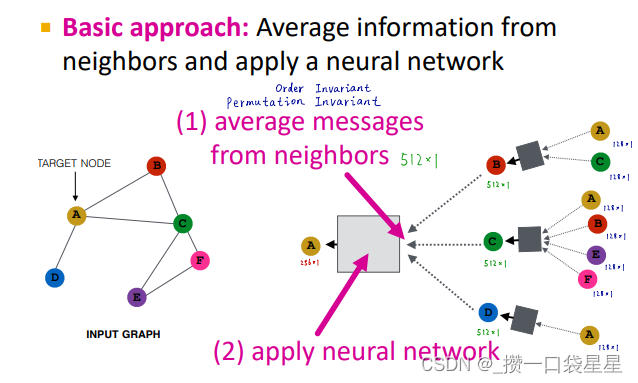
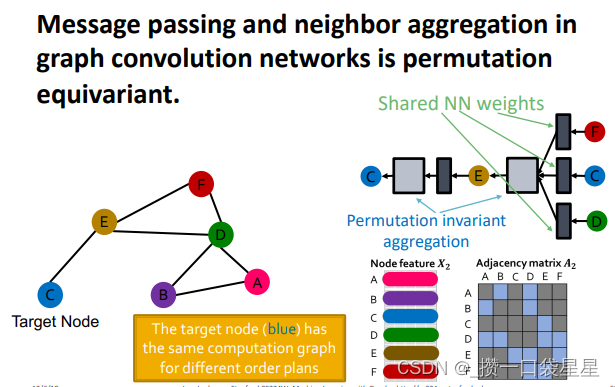
不同顺序下,目标节点有相同的计算图
2.3 模型训练
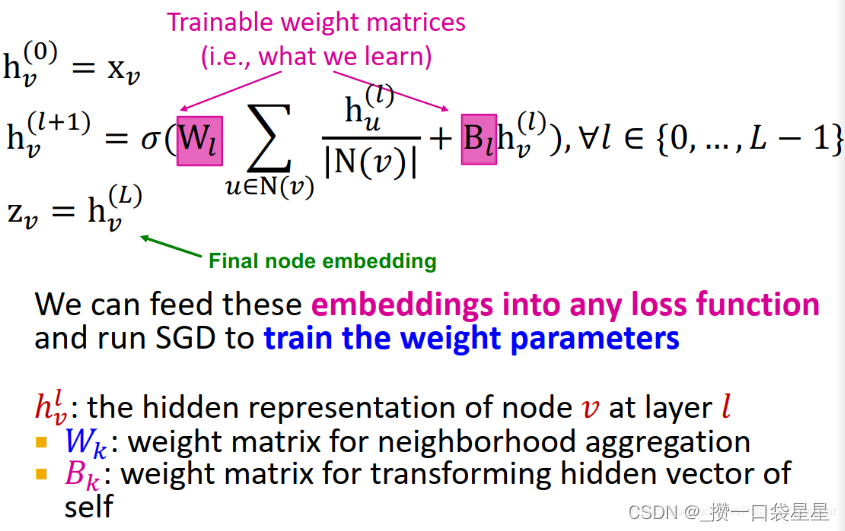
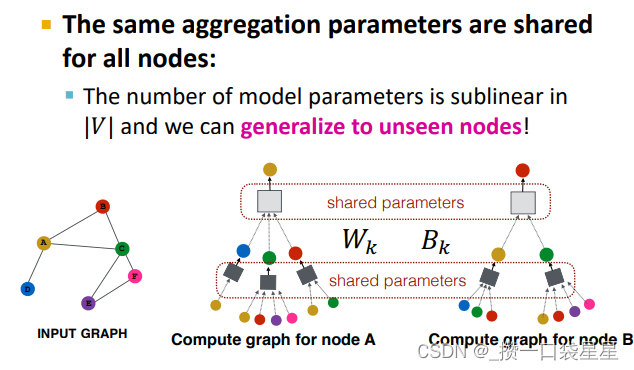
模型上可以学习的参数有Wl(neighborhood aggregation的权重)和Bl转换节点自身隐藏向量的权重)(注意,每层参数在不同节点之间是共享的)。
可以通过将输出的节点表示向量输入损失函数中,运行SGD来训练参数。
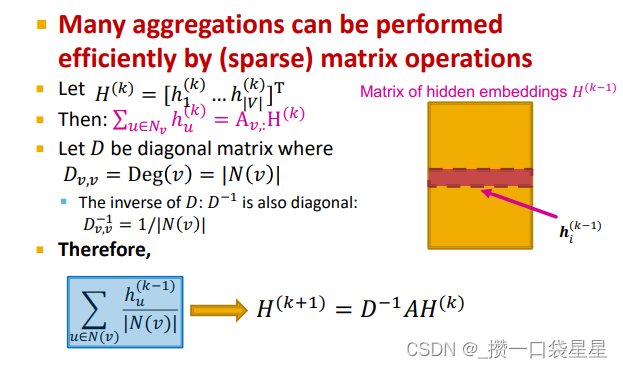
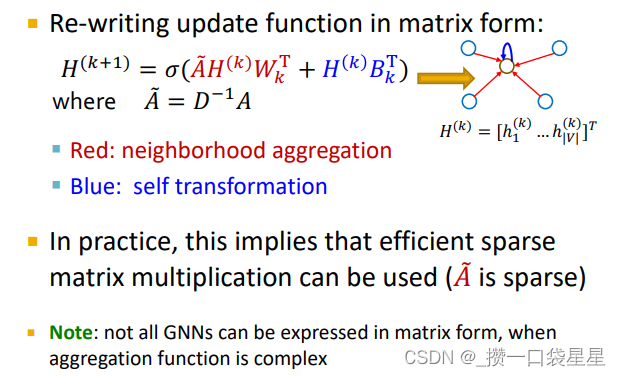
矩阵形式
训练:监督学习和非监督学习
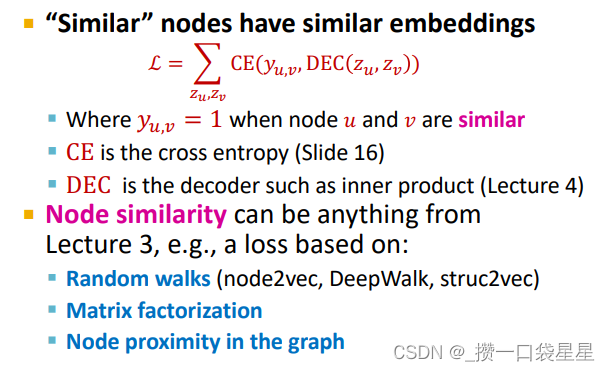
非监督学习
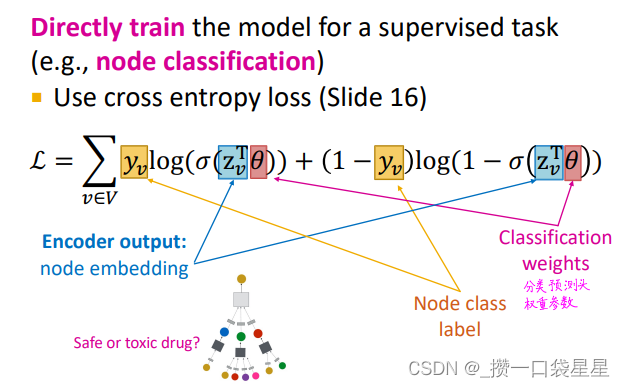
监督学习
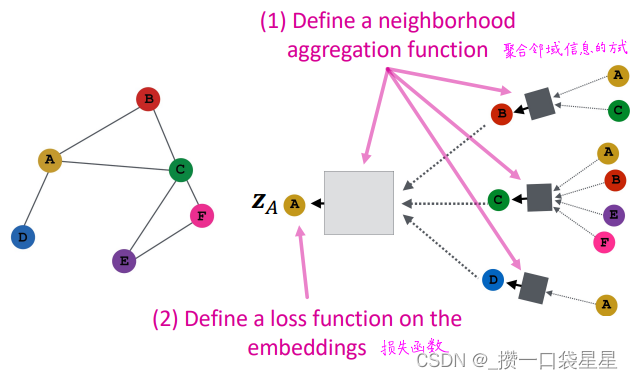
2.4 模型设计概述
第一步:定义节点聚合的函数
第二步:定义节点嵌入的损失函数
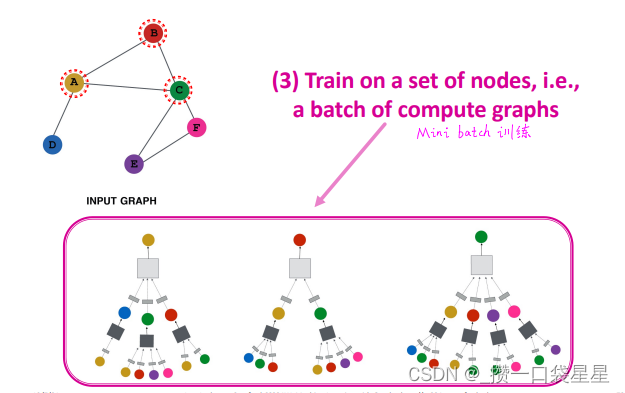
第三步:训练
第四步:生成节点嵌入
第五步:泛化到新节点
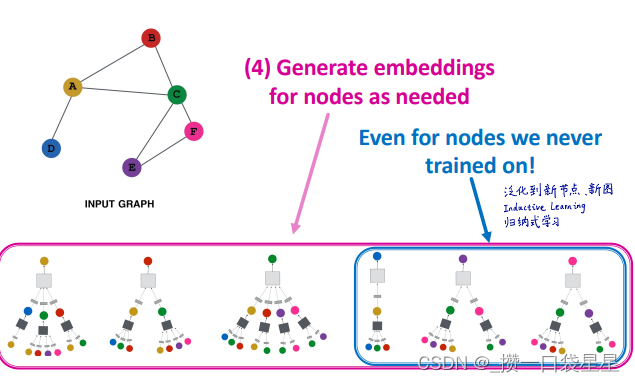
泛化到新节点:聚合参数在所有节点共享---->泛化到新图
2.5 GNN vs CNN
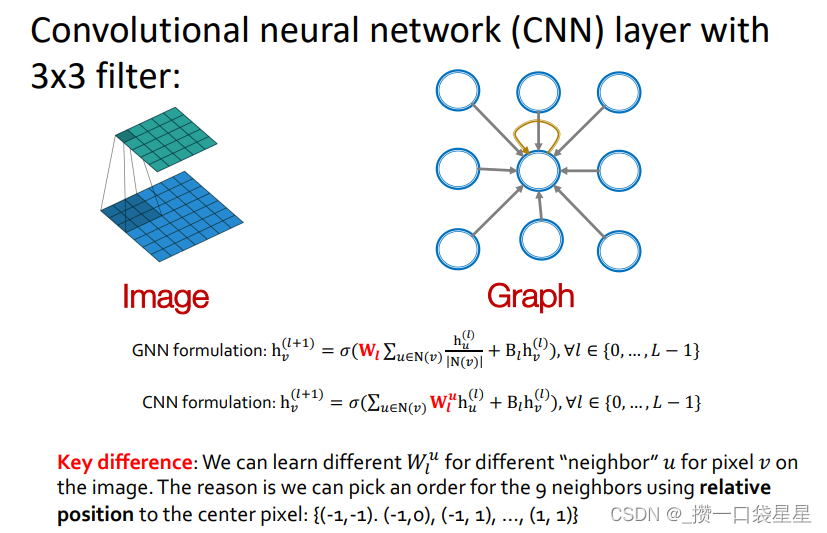
CNN可以看作时一个有固定邻域和固定顺序特殊的GNN
- CNN卷积核尺寸是预先定义的
- GNN的优势在于可以处理任意一个节点度不同的图
- CNN不是顺序不变的,改变像素的顺序可以得到不同的输出
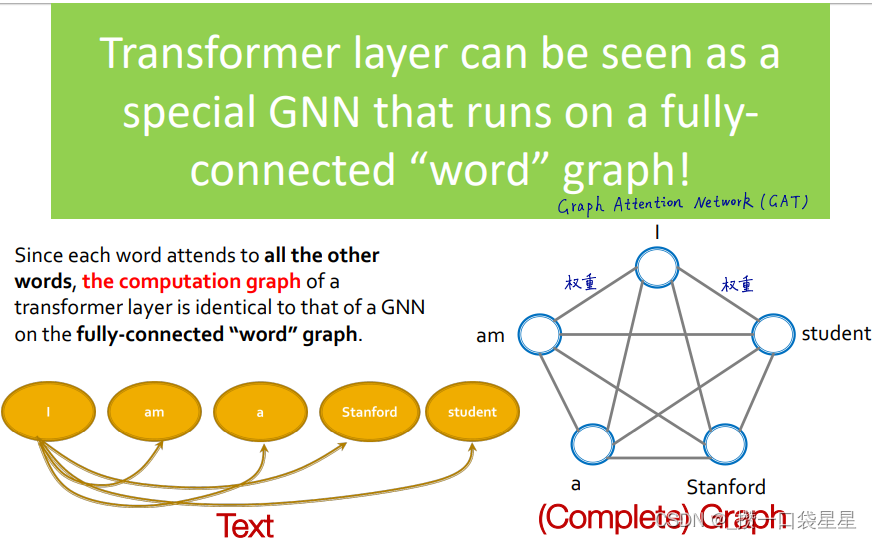
2.6 GNN transformer
transformer:处理顺序问题,核心是自注意力
- transformer可以看作是一个全连接词图的特殊GNN
3 图神经网络
优点
- 深度学习拟合学习能力强
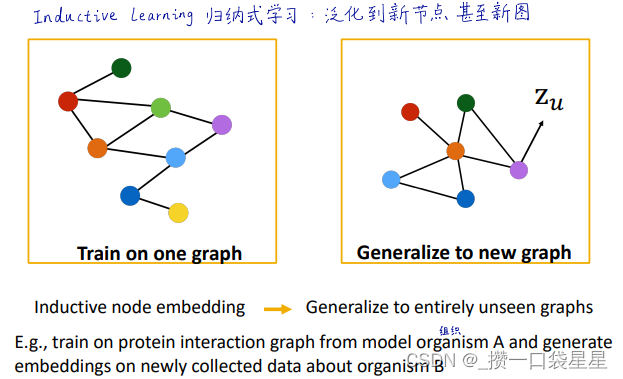
- 归纳式学习可以泛化到新节点新图
- 参数量少、所有计算图共享神经网络
- 利用节点的属性特征
- 利用节点的标注类别
- 区分节点结构功能角色(桥接、中枢、外围区域)
- 只需寥寥基层就可以让任意两个节点相互影响
3.1 GNN 基础
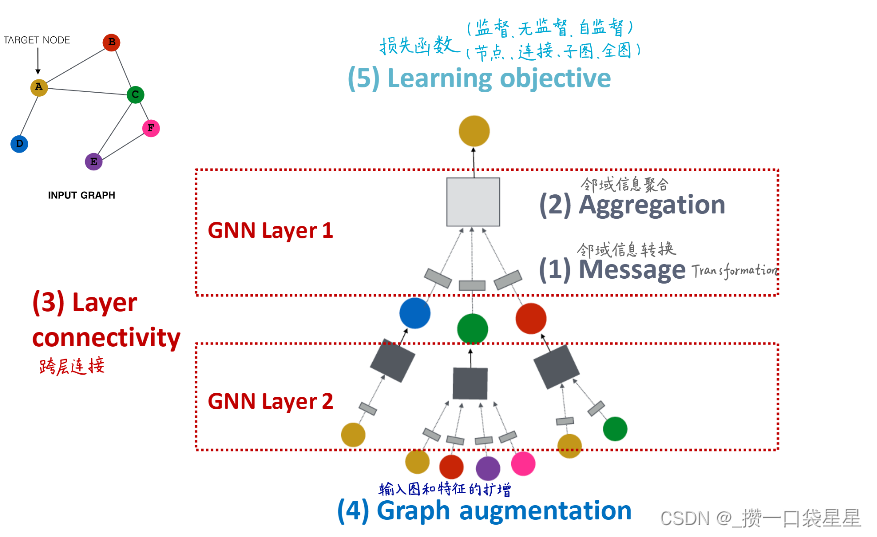
3.1.1 框架
- 原始输入图=!计算图(特征扩增和结构扩增)
- GNN layer:邻域信息转换+邻域信息聚合
- layer connectivity:按顺序堆叠
- 训练:监督或半监督
- 训练目标:节点、边、图
3.1.2 GNN layer=邻域信息转换+邻域信息聚合
- 有多种例子,GCN/ GraphSAGE/GAT
- 把多个邻居节点和自己的向量转换成一个向量
- 邻居节点的向量集合与节点顺序无关
- 邻域信息转换
- 邻域信息聚合
聚合方法可以是求和、平均、最大

- 存在问题
如果只用邻居节点的信息,说明该节点只取决于邻居节点---->解决办法:加上自己的节点信息
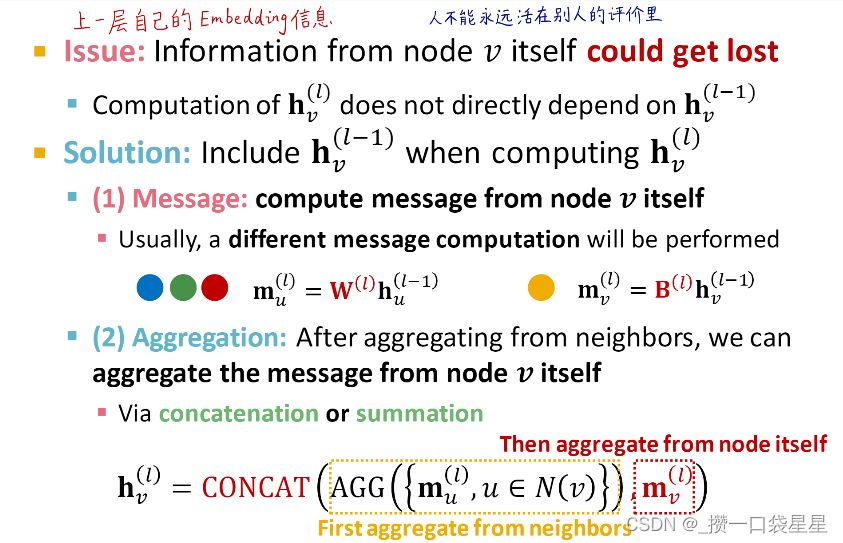
- GNN layer
- Classical GNN layer (GCN)
- GraphSAGE
个人理解是用到了邻域信息和自己的信息
AGG的方法有
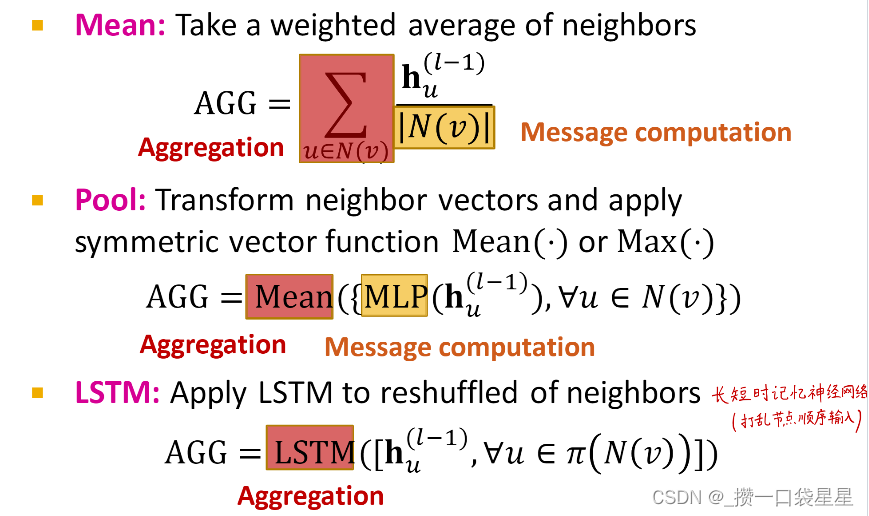
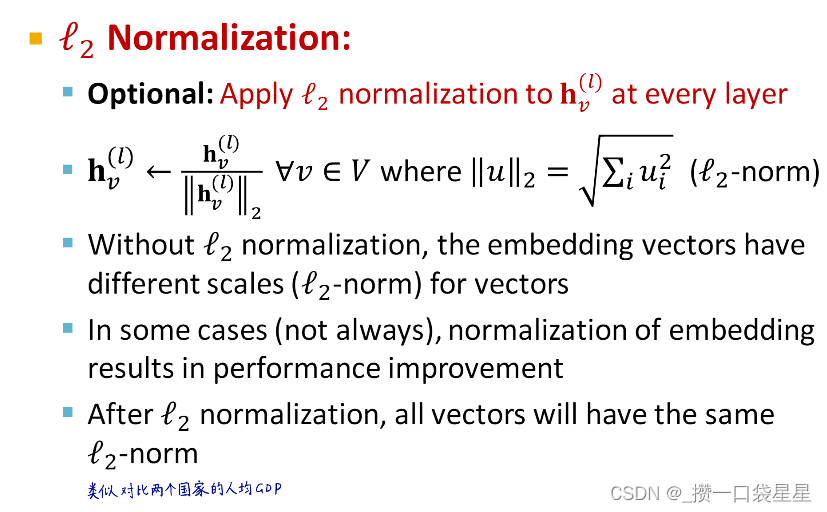
l2归一化
- GAT graph attention networks
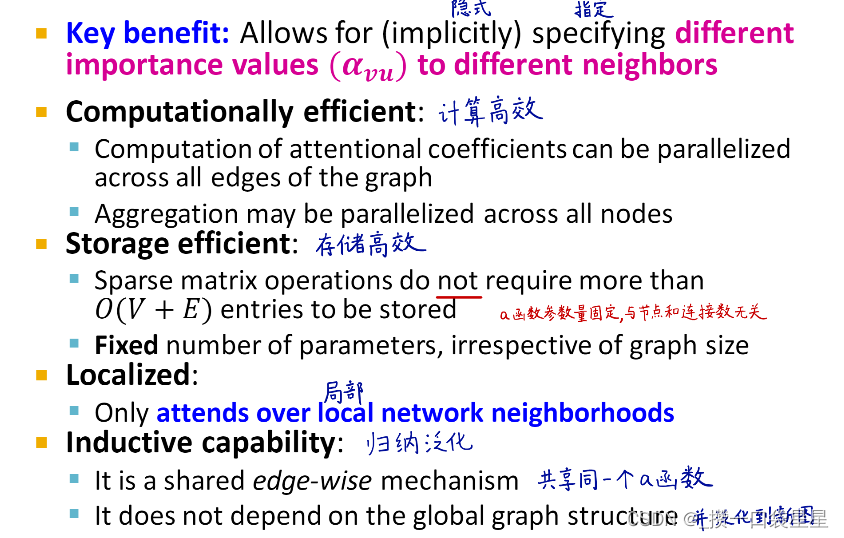
在 GCN和GraphSAGE中,邻居节点对该节点的权重系数取决于图的连接结构(节点度),且不同邻居带来的信息权重相同
—>实际上,不同节点带来的权重是不同的,引入注意力权重
第一步:用自注意力函数对每个邻居节点计算一个注意力分数
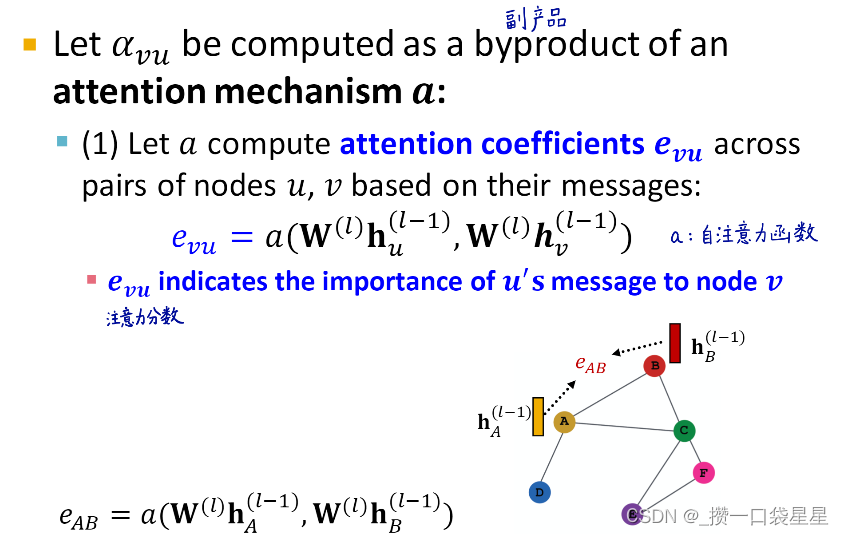
第二步:自注意力函数
- 自注意力系数是一个标量
- 自注意力函数自定义,可以是一个单层神经网络

第三步:用softmax 将自注意力系数归一化为权重,最后加权求和得到聚合结果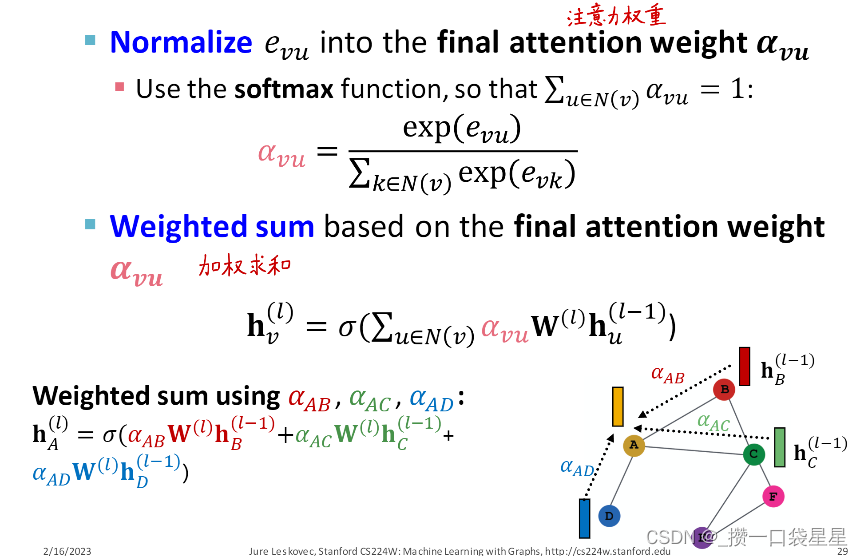
注意力机制改进—多头注意力机制:避免偏见,陷入局部最优
分别训练不同的自注意力函数,每个函数对应一套自注意力权重

自注意力机制的优点: - 不同节点权重不同
- 计算高效:可以并行计算
- 存储高效
- 局部图参与计算
- 泛化
3.1.3 GNN layer in practice
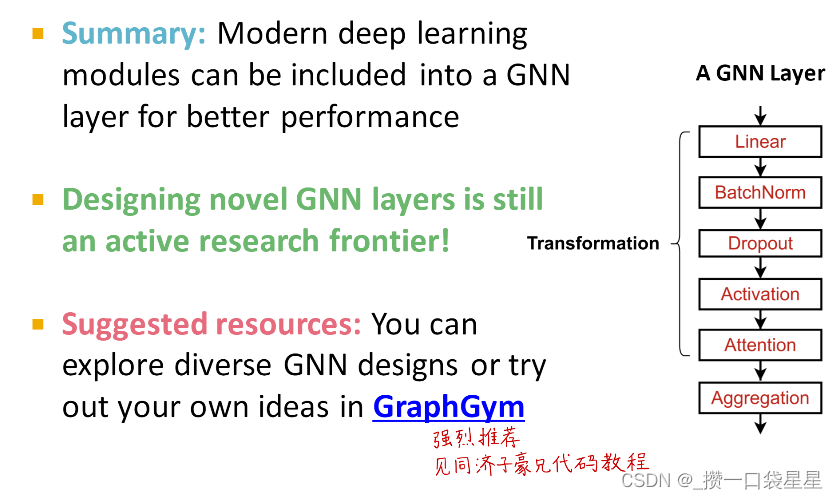
- 框架
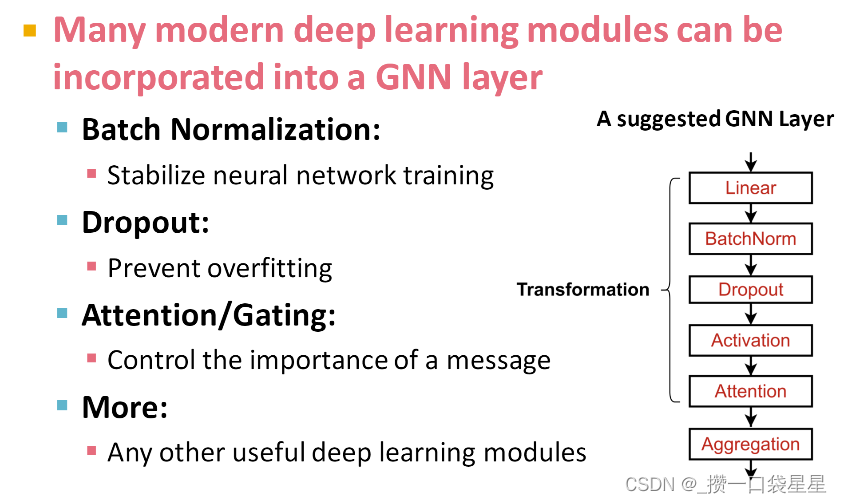
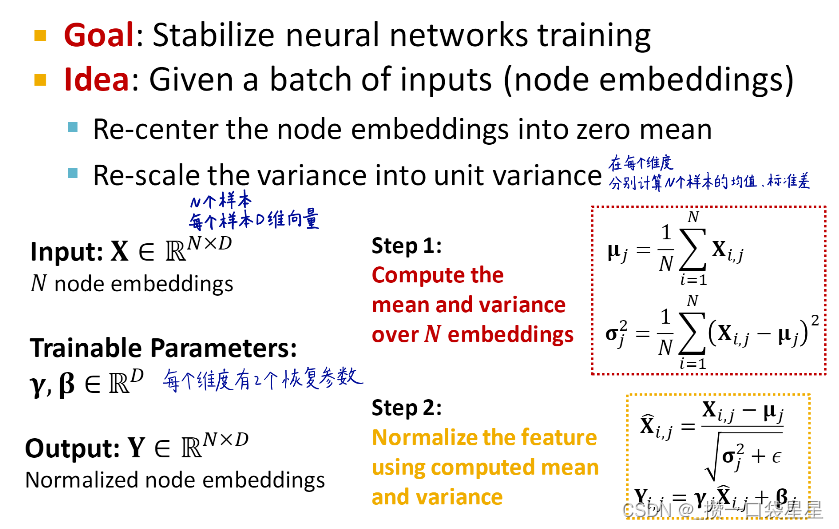
- batch normalization:标准化
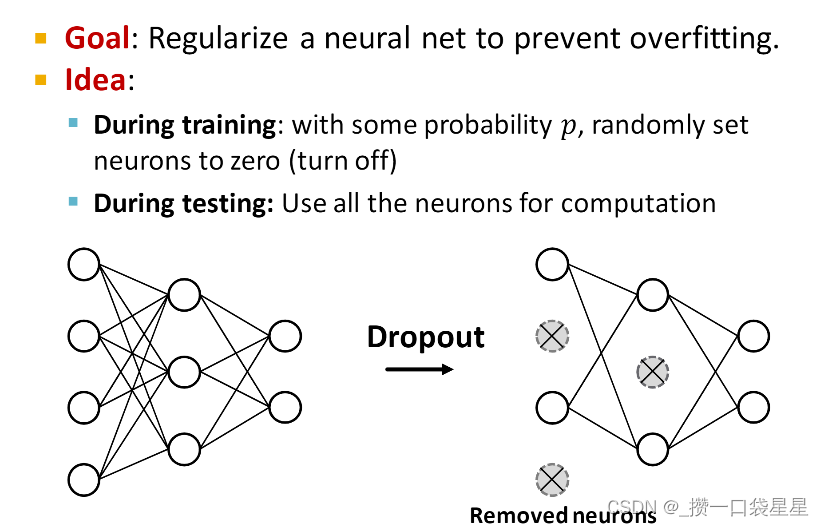
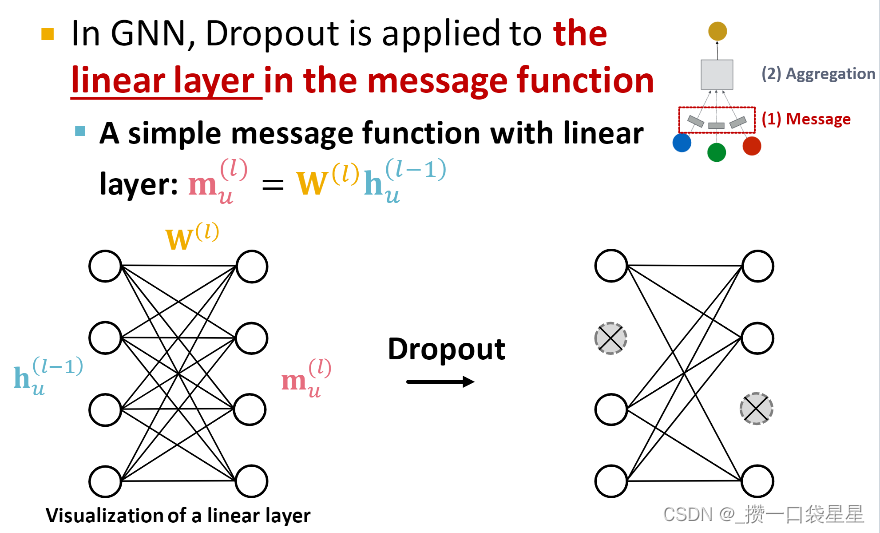
- dropout:防止过拟合
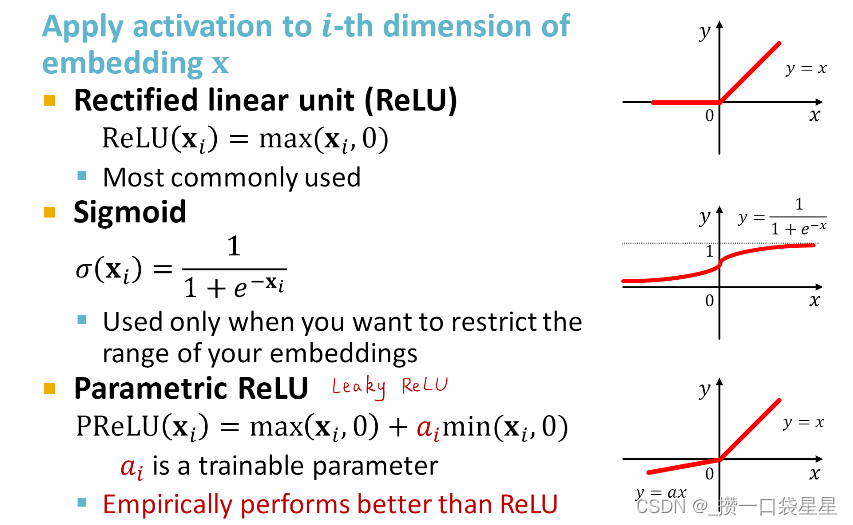
 4. activation 非线性
4. activation 非线性
- 小结
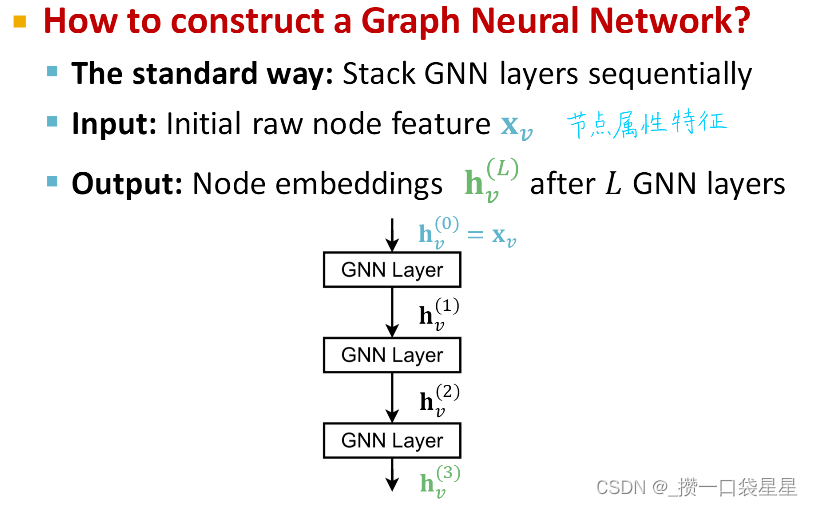
3.1.4 GNN layers stacking
- 按顺序堆叠layers
- 输入:原始节点属性特征,输出:节点嵌入
- 过度平滑问题
GNN层数不能过深
- 所有节点的嵌入相同
K层GNN的感受野:决定节点嵌入的节点集合
- 共享邻居节点随着GNN层数的增加快速增加
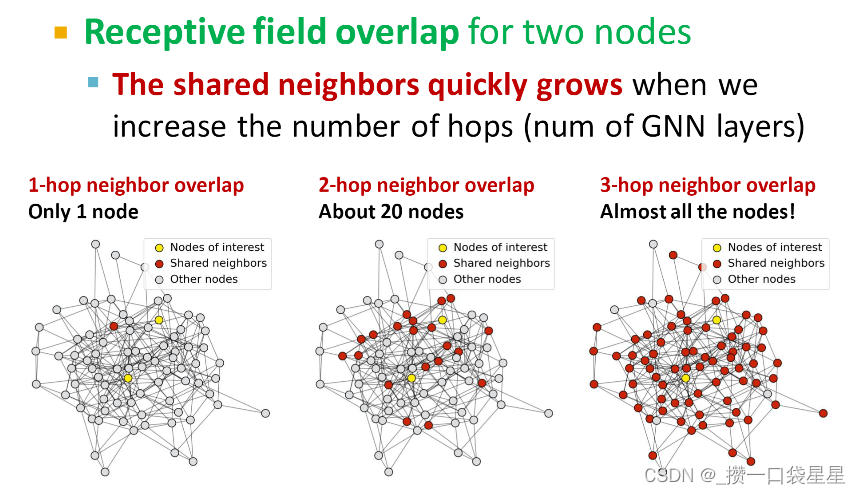
一个节点的嵌入取决于它的感受野,如果两个节点有高度重合的感受野,那么他们的嵌入就会非常相似
---->出现过度平滑的问题
解决方法:从GNNlayers的连接入手
(1)不能无脑堆很多层
第一步:计算必要的感受野(例如计算图的直径)
第二步:将GNNlayers的个数稍稍大于我们需要的感受野,可以用automl找到最优的层数
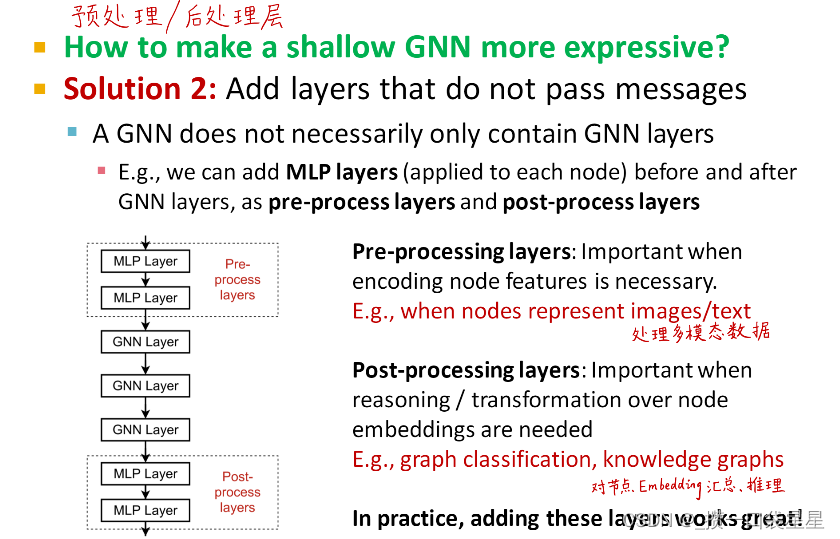
如果GNN层数很小,如果提高GNN的表示能力?
1)在GNN层的内部加上深度神经网络
在之前的例子中,邻域信息转换或聚合只有一个线性层
2)预处理和后处理
在GNN层的前后加MLP层
如果需要很多GNN 层呢?
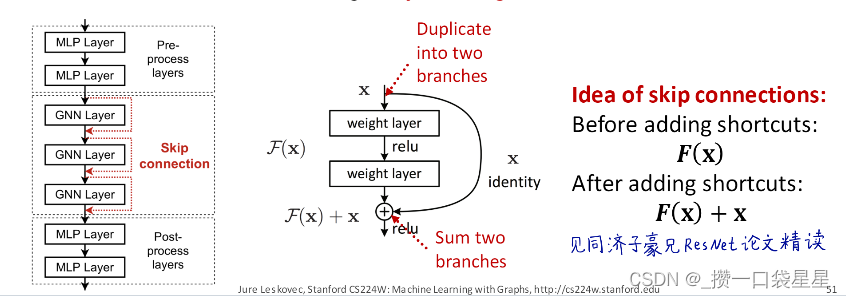
解决方法(2)在GNN中增加skip connections
GNN靠前层(感受野较小的层)的节点嵌入能够较好的区分节点—>通过裁剪增加前面层的影响
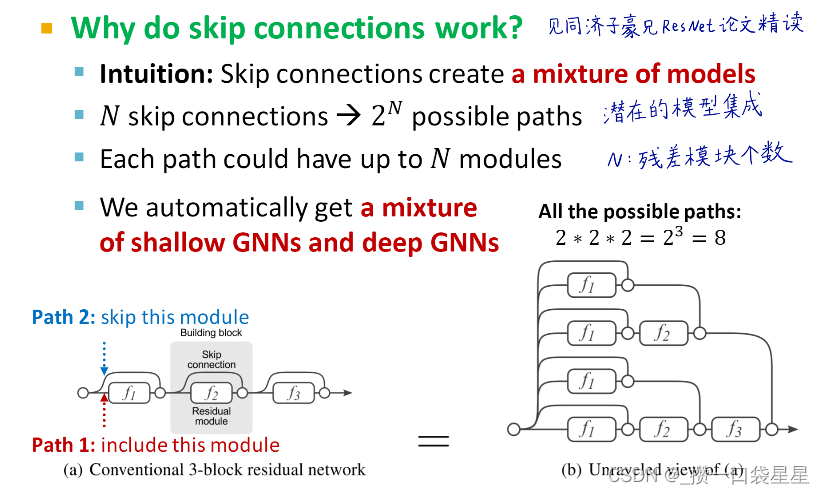
skip connections可以创造混合模型
例子:GCN with skip conections
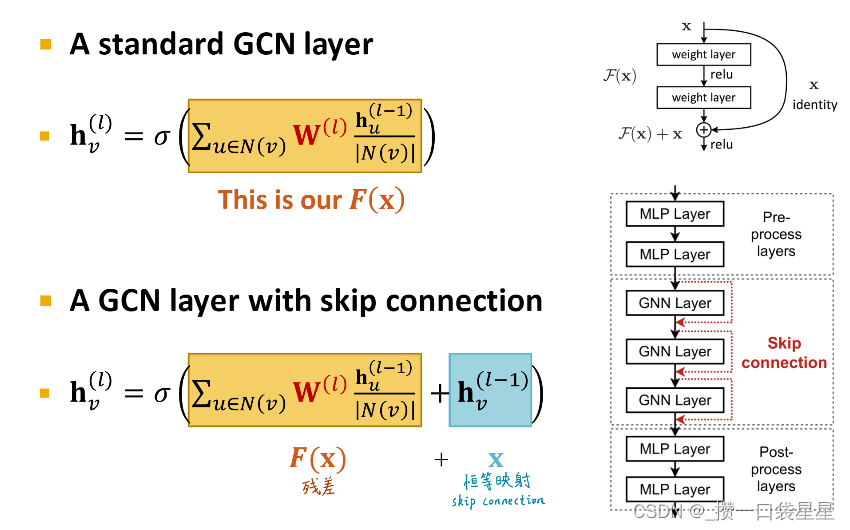
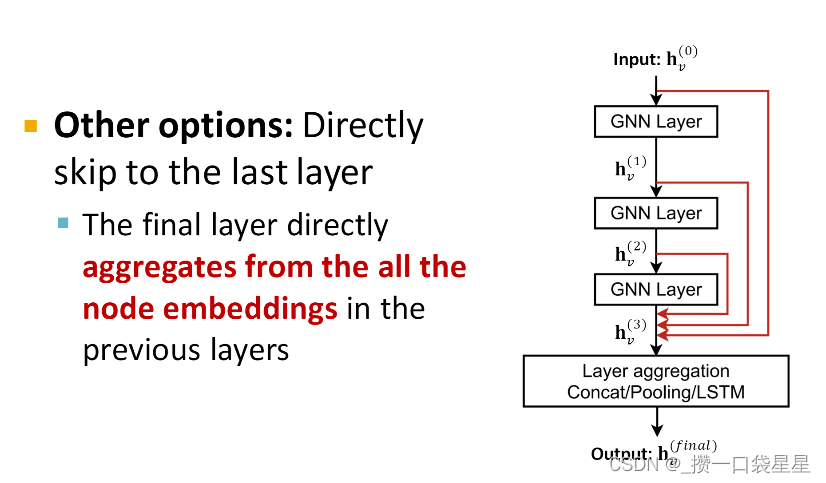
其他例子;
3.1.5 输入图和特征的扩增
在这之前,都是假设原始图==计算图
但是,
- 节点特征层面,输入图缺少节点特征—>特征增强
- 图结构层面
- 太过稀疏—消息传递效率低—>添加虚拟节点和边
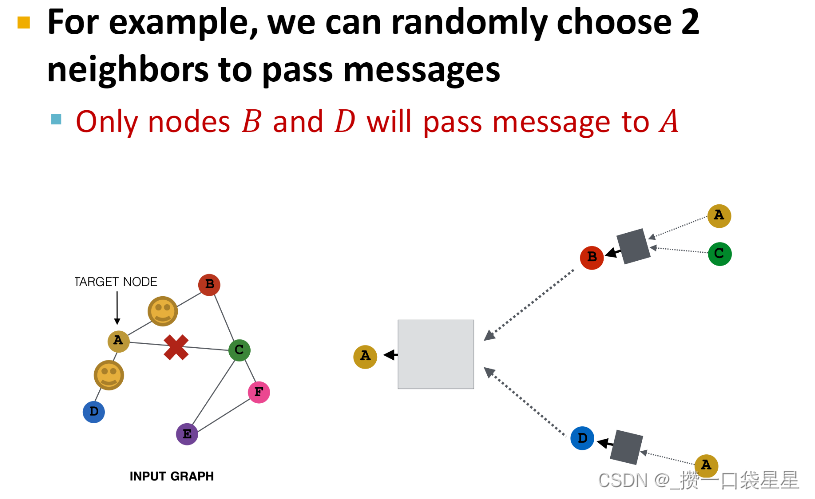
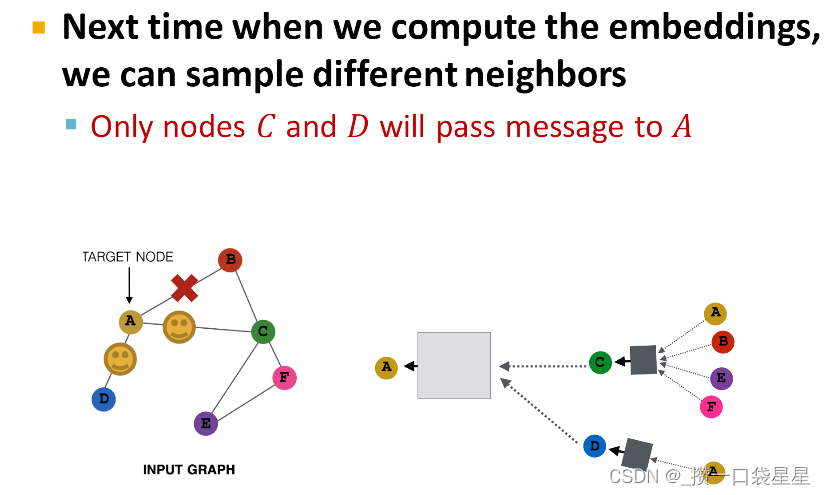
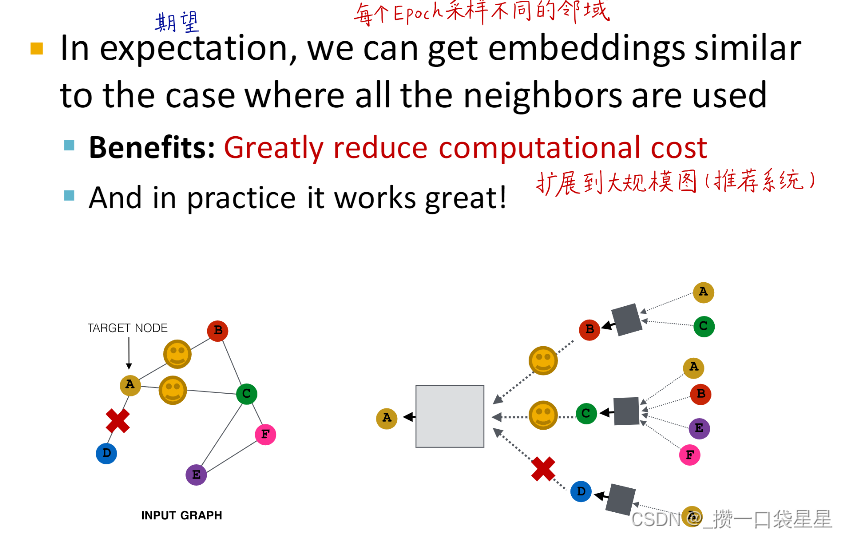
- 太过稠密—消息传递耗资源—>消息传递时对邻居节点采样
- 太大—计算图与GPU不匹配—>计算嵌入时采样子图
- 原始图 不太可能 恰好就是最优的计算图
- 为什么要进行特征增强?
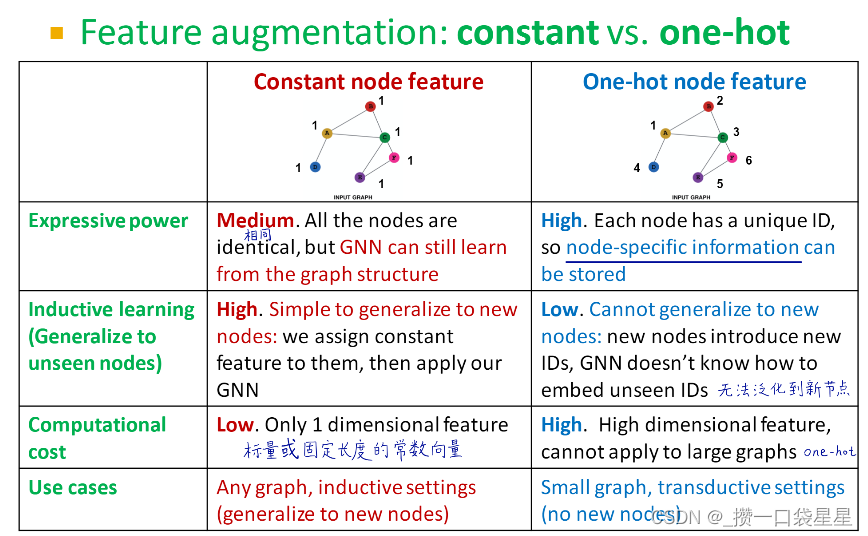
(1)正常情况下我们只有邻接矩阵,没有节点属性
(a)给节点分配一个常数,也可以是固定长度的常数向量
(b)给节点分配一个唯一ID编号,这些ID编号转化成独热向量
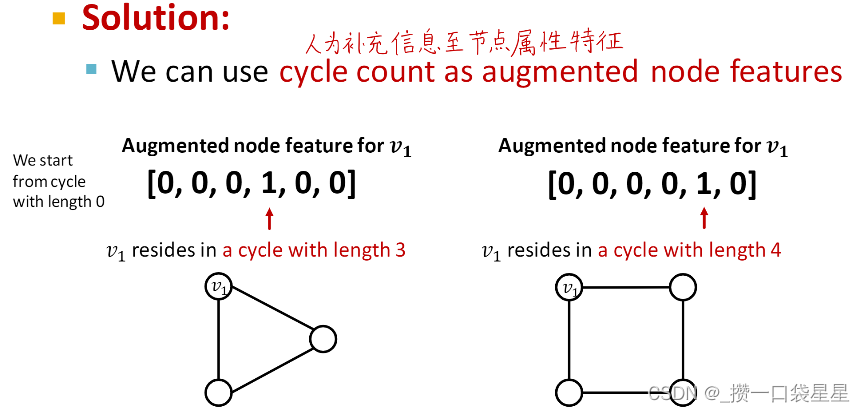
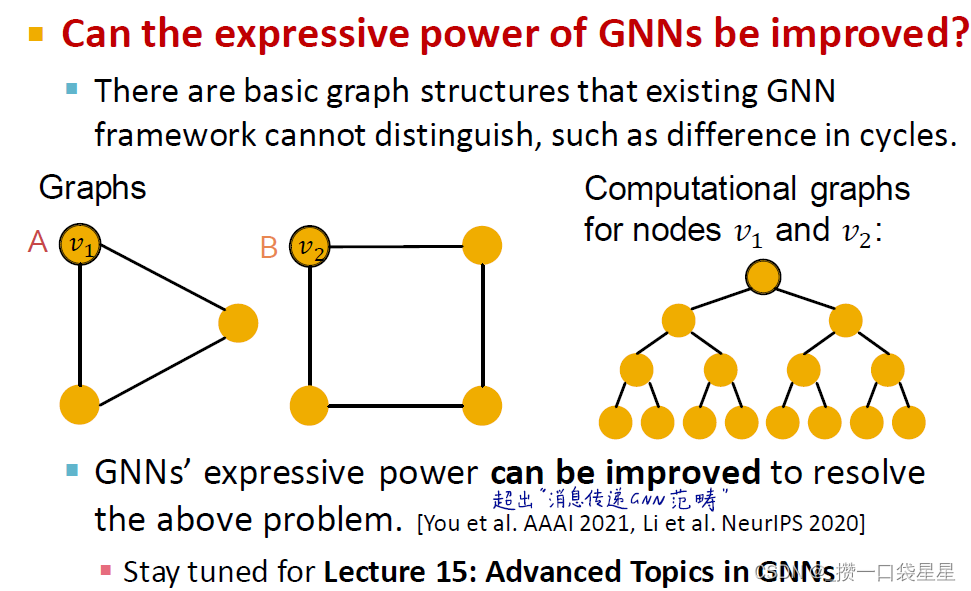
(2)用GNN很难学习一些图结构
例如:数节点所在环的长度,GNN学不到
- 因为所有节点度相同(除非有属性特征)
- 计算图是相同的二叉树
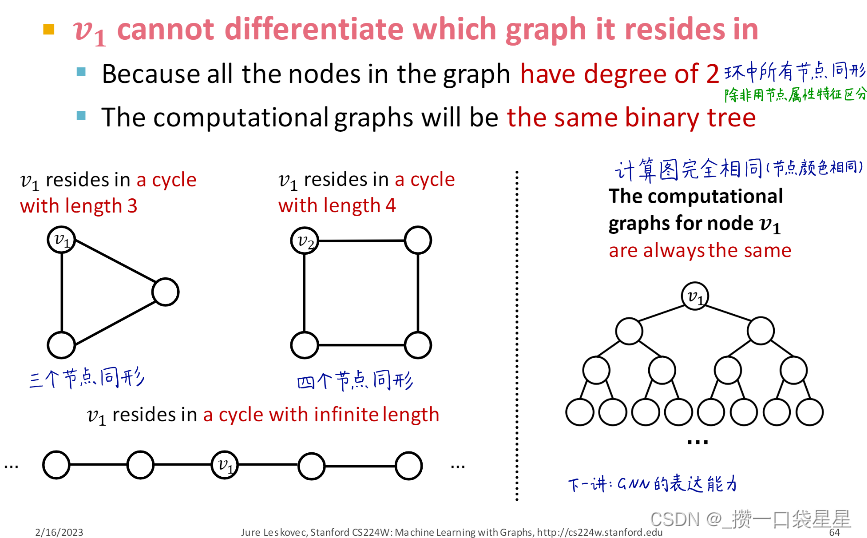
解决方法:人为补充信息至节点属性特征
- 添加虚拟节点和边
目的:增强稀疏图
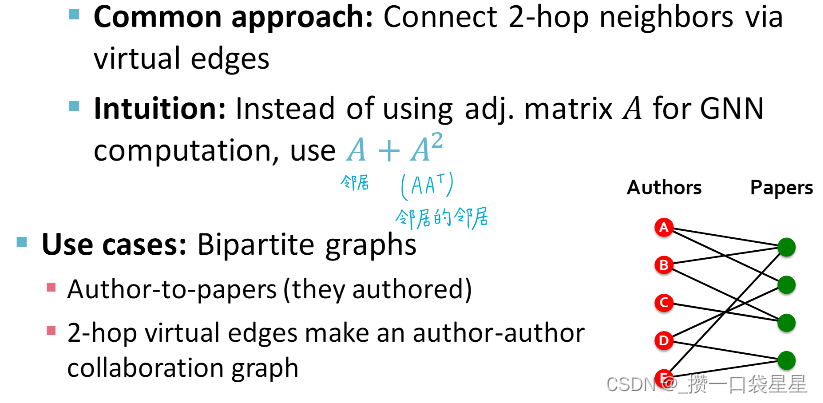
(1)虚拟边
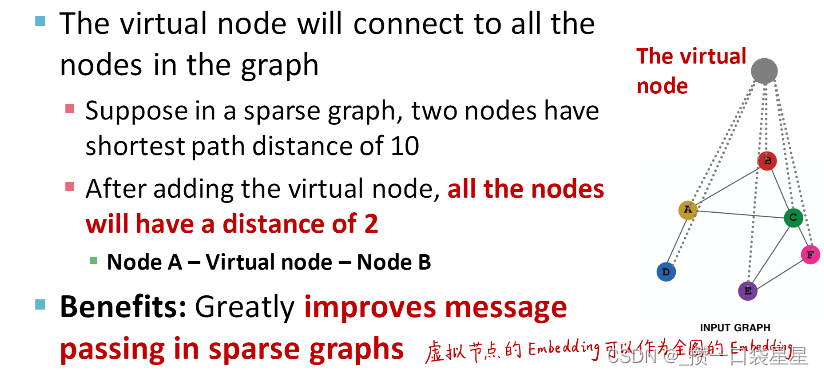
(2)虚拟节点
- 消息传递时对邻居节点采样
目的:稠密图(所有节点用来传递消息)
该方法是对选取部分节点用来传递信息
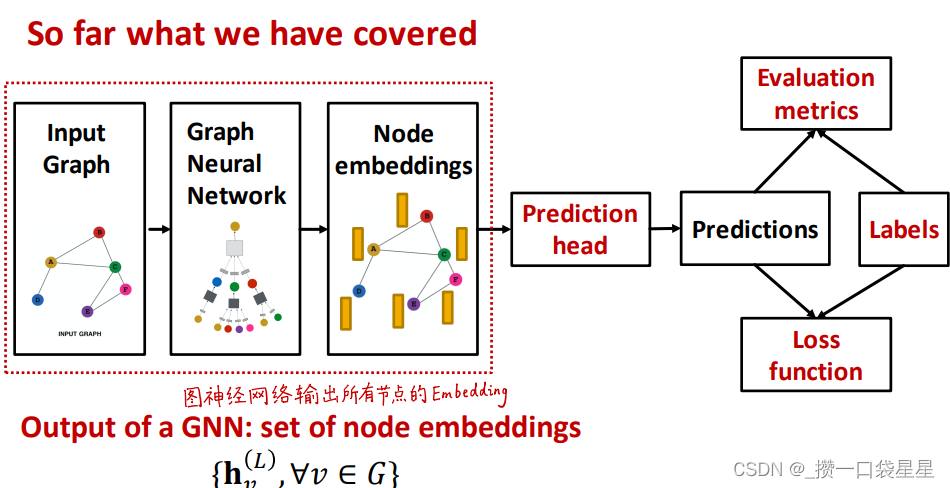
3.1.6 GNN训练–rediction head
以上步骤可以得到节点嵌入,下一步是prediction head
- 节点层面
- 边层面
- 图层面
不同的预测任务需要不同的prediction head
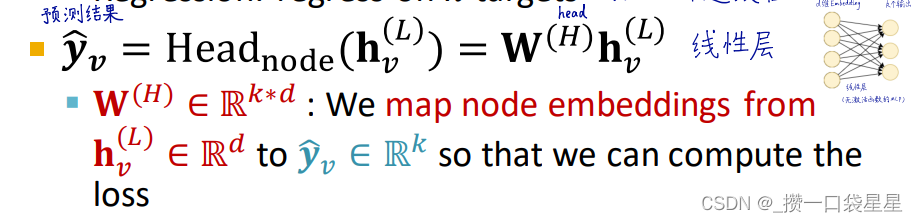
(1) 节点层面
经过GNN计算,得到了节点的D维向量,可以直接使用节点嵌入进行预测
可以进行分类(k个类别的概率)或者回归(k个连续值)
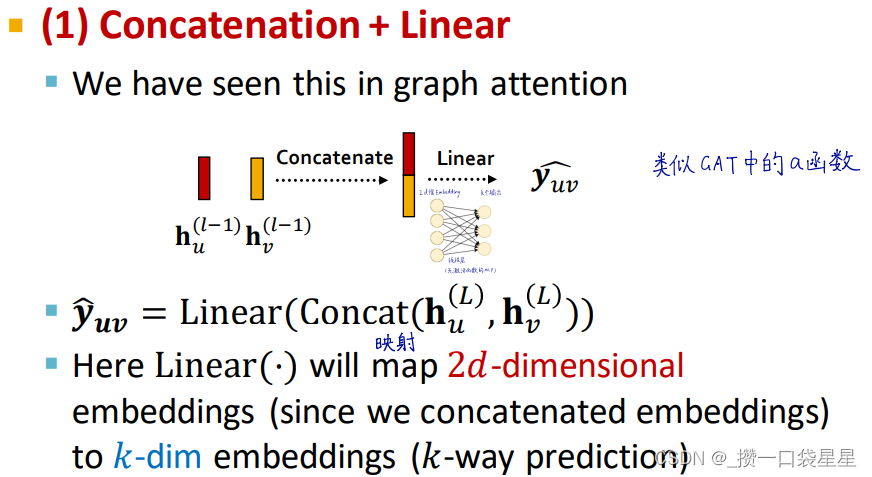
(2)边层面
用节点嵌入对进行预测

(a)联结+线性
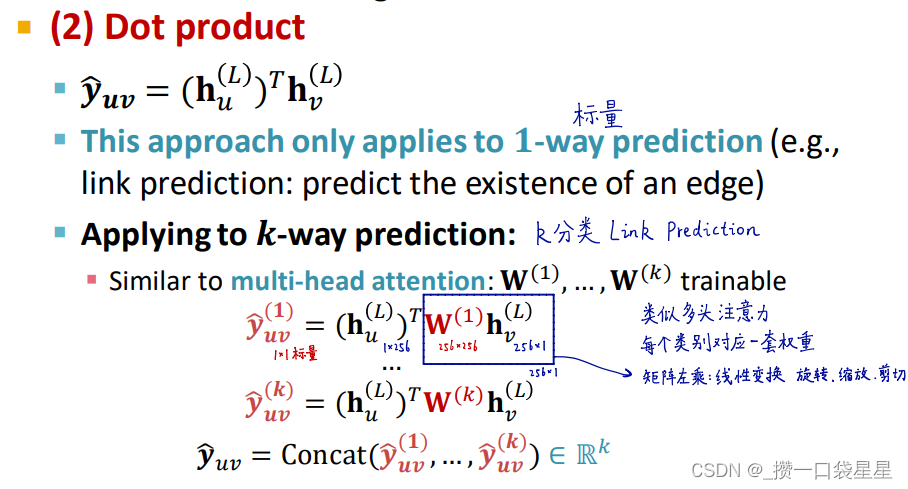
(2)点乘
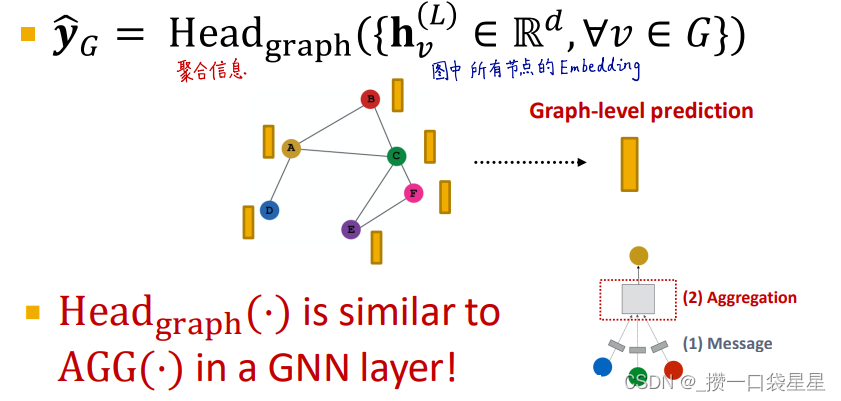
(3)图层面
用所有节点的嵌入进行预测
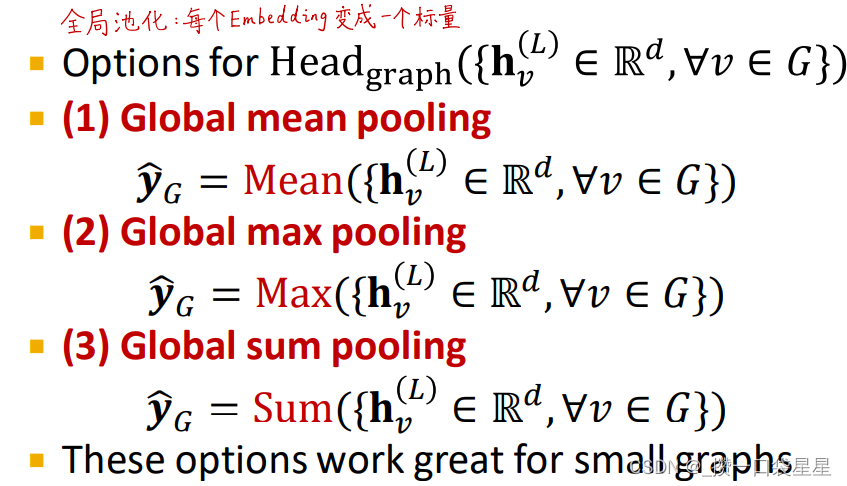
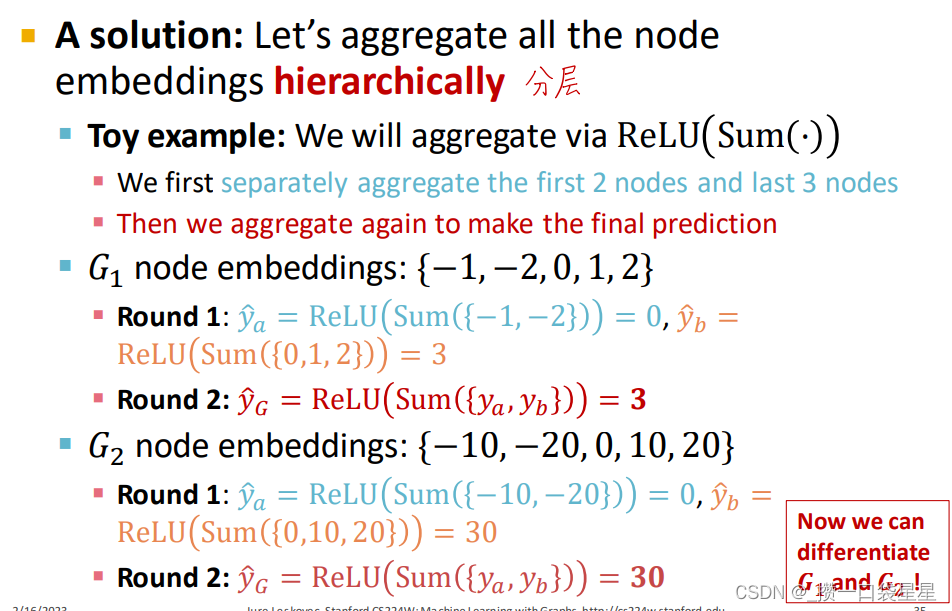
以上方法在小图中效果很好,在大图中会丢失信息,在大型图中怎么做呢?
比如在下面的例子中,两个图的预测结果相同。

—>解决方法:分层聚合节点嵌入
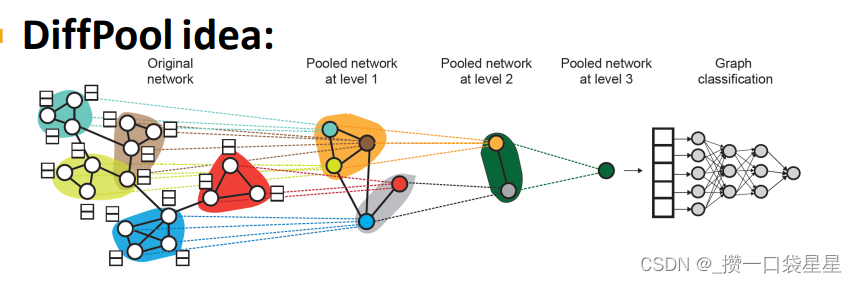
示例1:社群分层池化
a.分层池化
b.利用2个独立的GNN,A计算节点嵌入,B计算节点聚类
c.两个GNN可以同时执行
对于每个池化层
- 使用GNN B的聚类结果来聚合GNN A生成的节点嵌入
- 为每个集群创建一个新节点,保持集群之间的边缘以生成一个新的池网络
联合训练GNN A和GNN B
3.1.7 GNN 训练—预测和标签
- 真实值来自监督学习中的标签或者无监督学习的信号
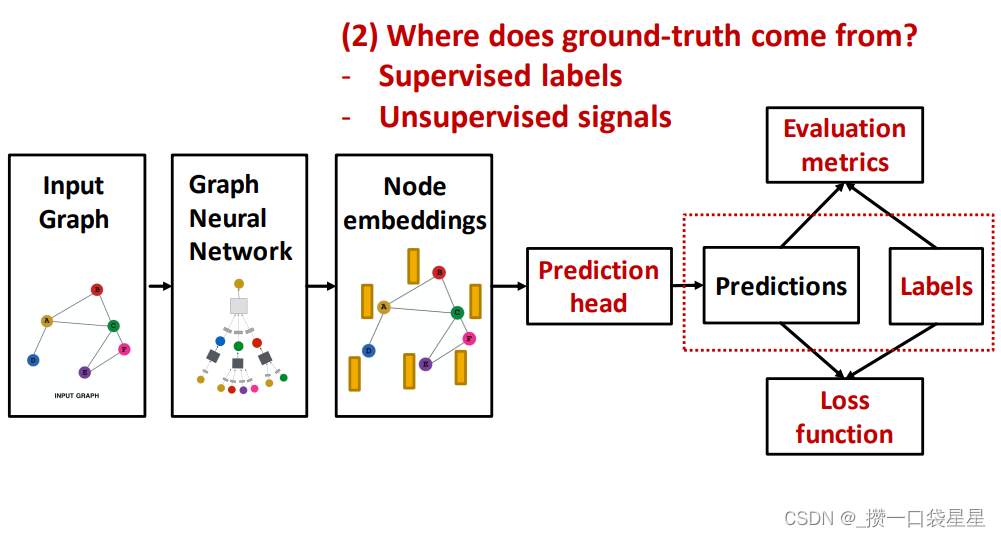
- 监督学习和无监督学习
blurry模糊不清的
监督学习标签,不同案例标签不同
无监督学习
3. 1.8 GNN训练—损失函数
分类,结果为离散值;回归,结果为连续值。GNN可以应用于这两种情况。
不同之处在于损失函数和评价指标
- 分类的损失函数
交叉熵

- 回归的损失函数
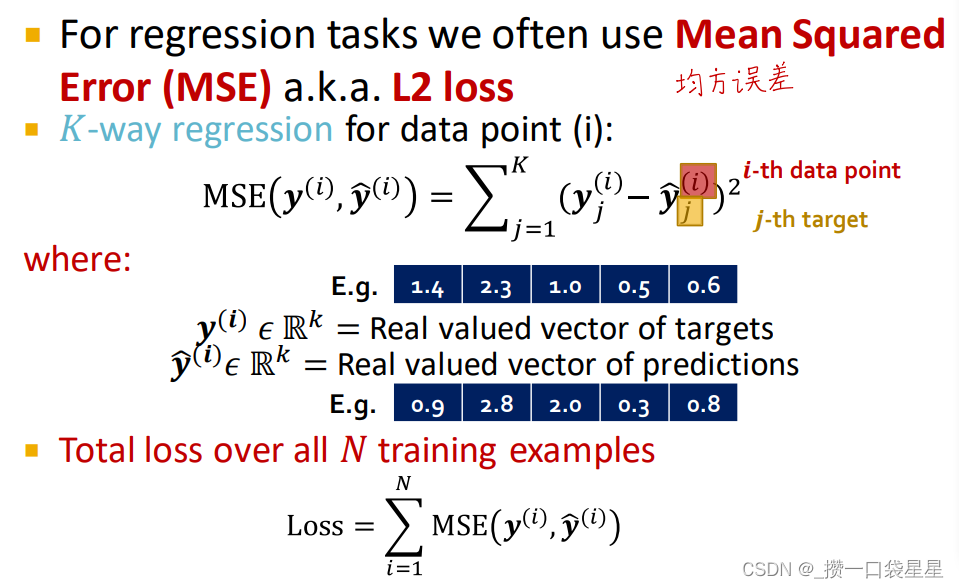
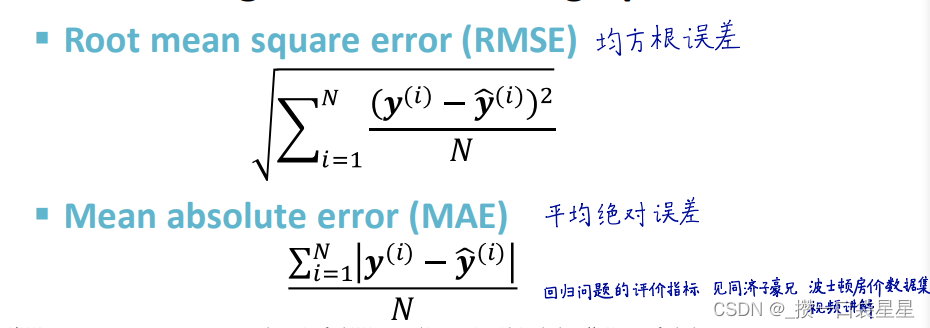
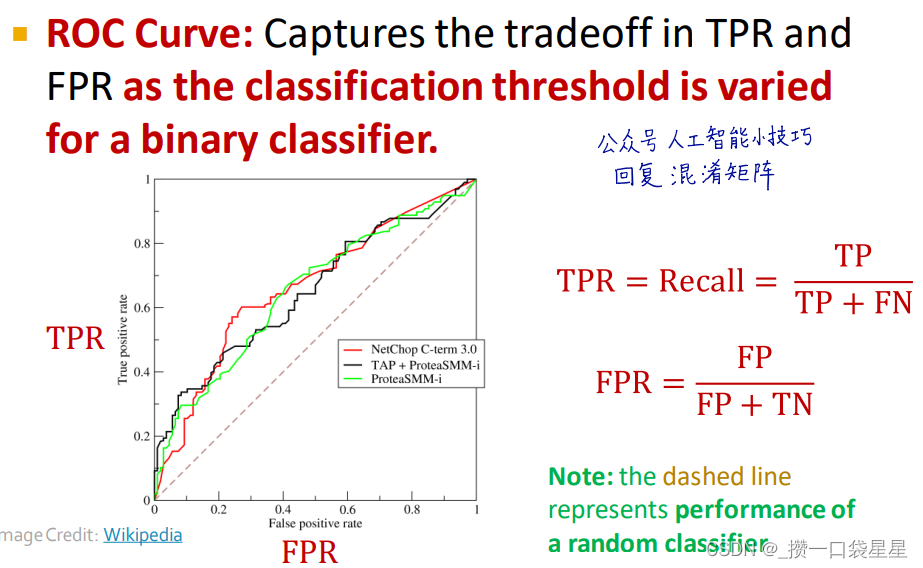
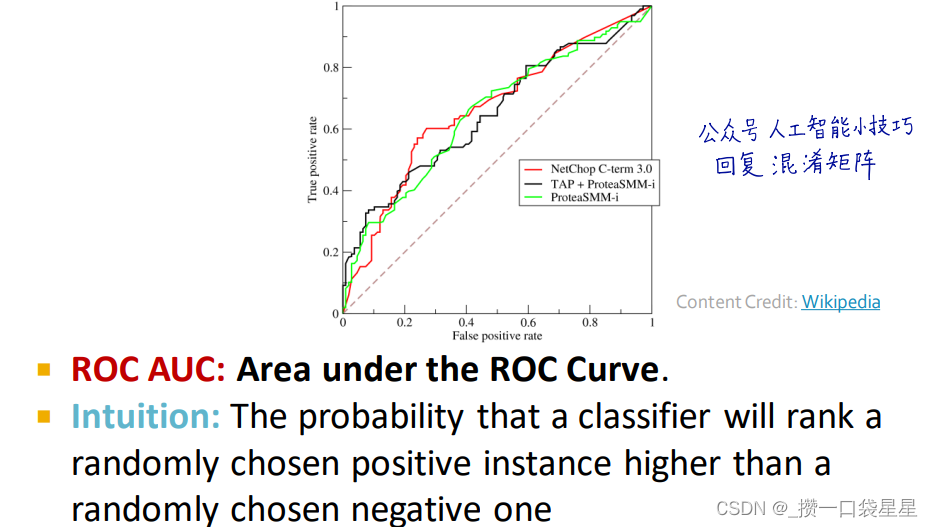
3.1.9 GNN 训练–评价指标
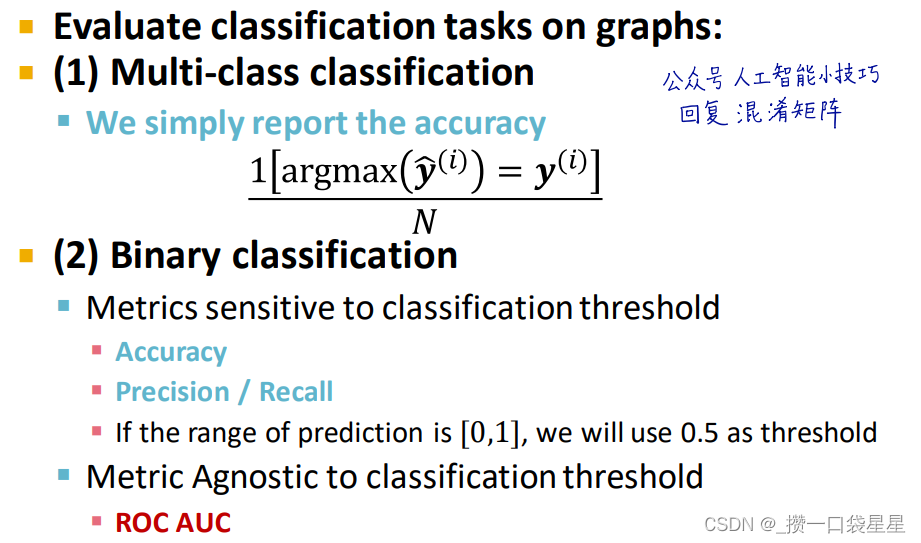
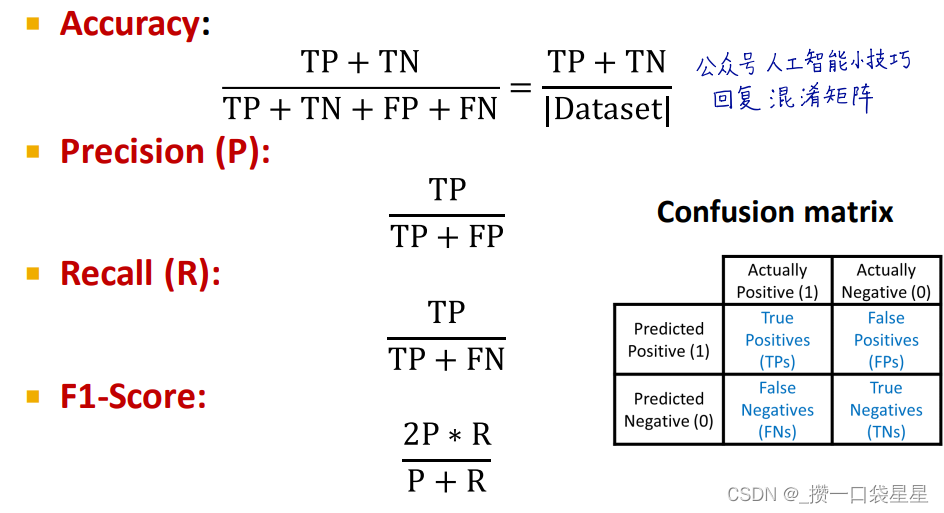
精确度和混淆矩阵,可以用sklearn实现
- 回归
- 分类
3.1.10 建立GNN 预测任务
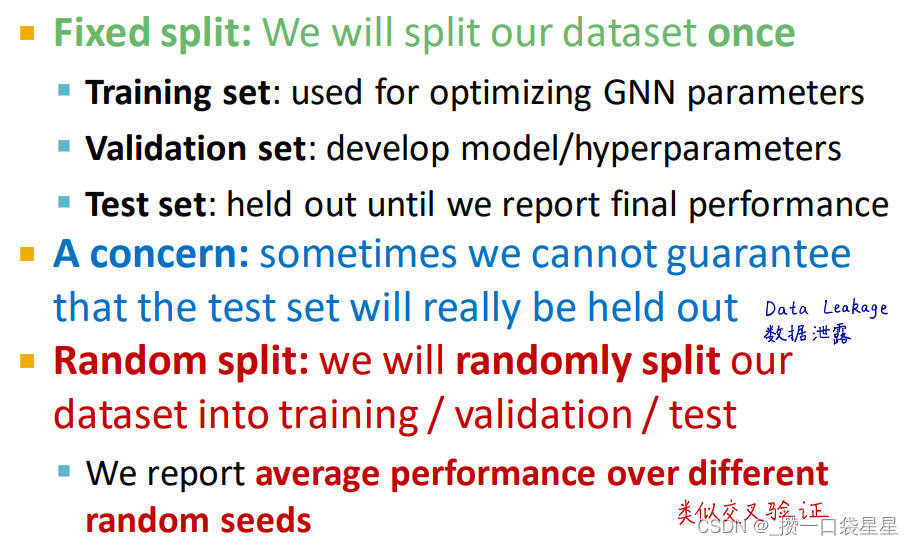
如果分配训练集、验证集、测试集
- 数据集分配方法: 固定分配、随机分配
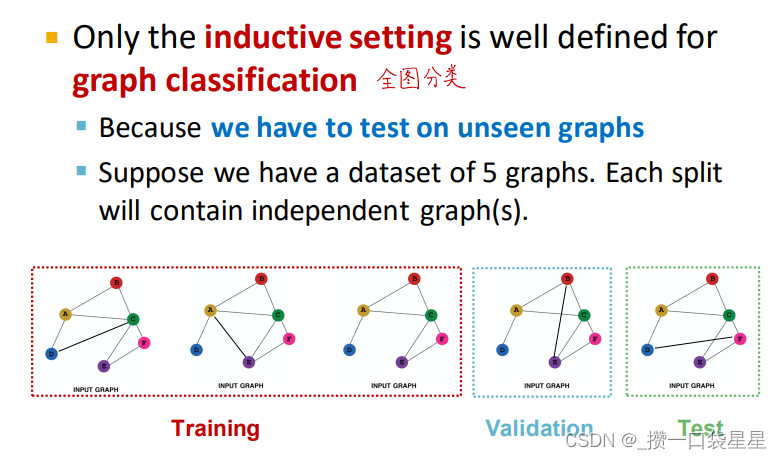
对于图像分类,每个图像是一个数据,样本之间独立同分布
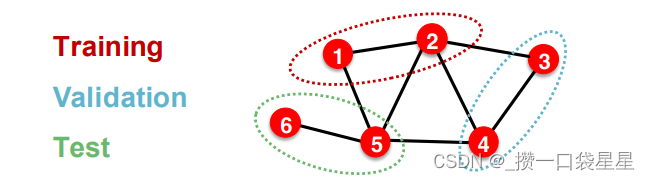
但是对于节点分类,节点之间并不是独立同分布的,所以训练集节点的计算图中可能出现测试集节点 - GNN 中如何分配?
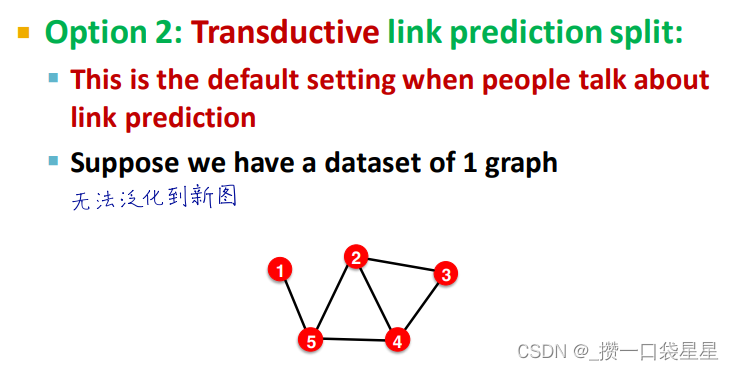
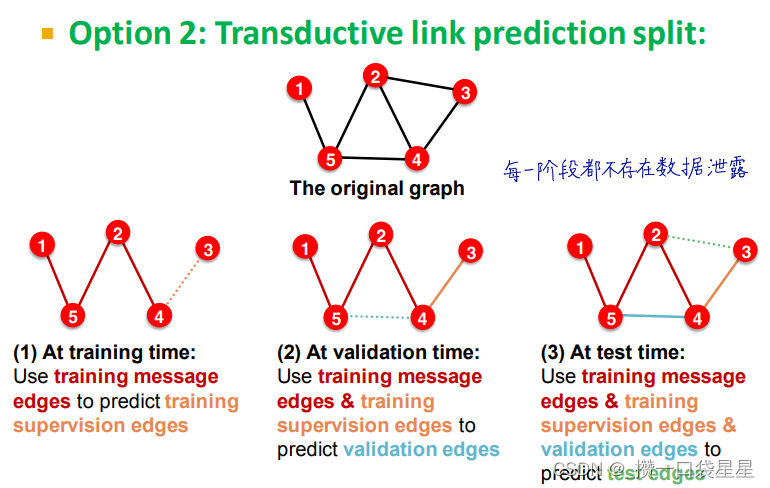
(1)直推式学习
输入图在训练、验证和测试时都可以用,只分配标签
训练时,用整图计算节点嵌入,训练时采用1、2节点的标签
验证时,用整图计算节点嵌入,采用3、4节点的标签评价
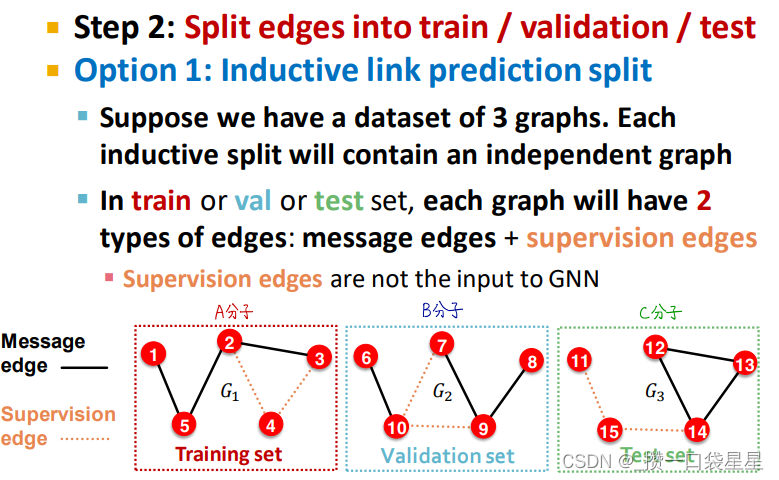
(2)归纳式学习
将分配集之间的边打断,得到多个子图,得到的三个图时相互独立的
训练时,用节点1、2计算嵌入,节点1、2训练
验证时,用3、4计算嵌入,3、4评价
比较:
直推式学习,训练验证和测试在同一个图上,用节点标签分配,只能用于节点预测和边预测任务
归纳式学习,训练验证和测试在不同的图上,可以用于节点预测、边预测和图任务中。好的模型应该可以泛化到新图
例子:
a.节点分类:直推式和归纳式
b.图分类:归纳式
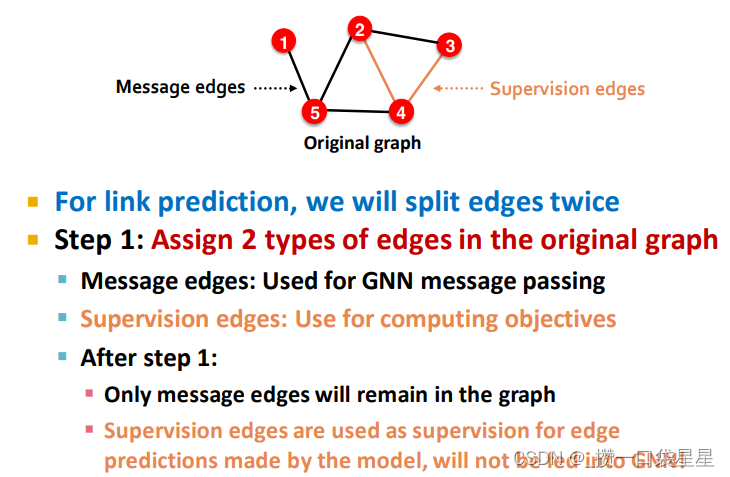
c.边预测:预测缺失的边
一个无监督/自我监督的任务。我们需要自己创建标签和数据集
具体来说,我们需要对GNN隐藏一些边,并让GNN预测这些边是否存在
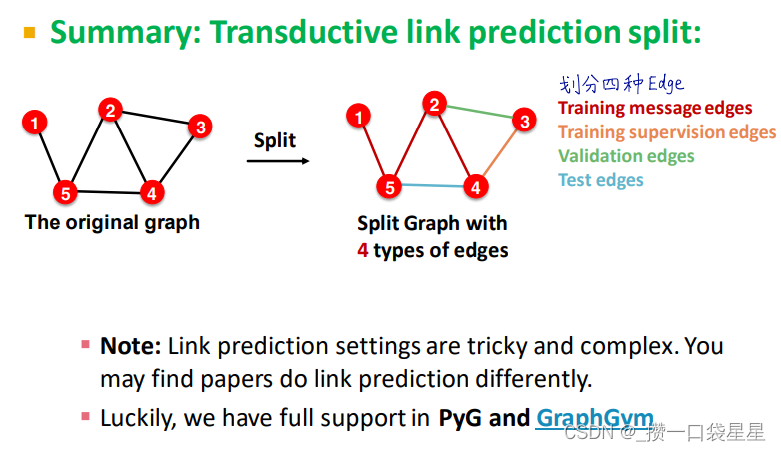
第一步:创建数据集,一部分边作为message edges 一部分作为supervision edges(应该隐藏起来)
3.2 GNN的表示能力
神经网络有万能近似定理
图神经网络的表达能力:区分不同图结构的能力
3.2.1 GNN基础概念
-
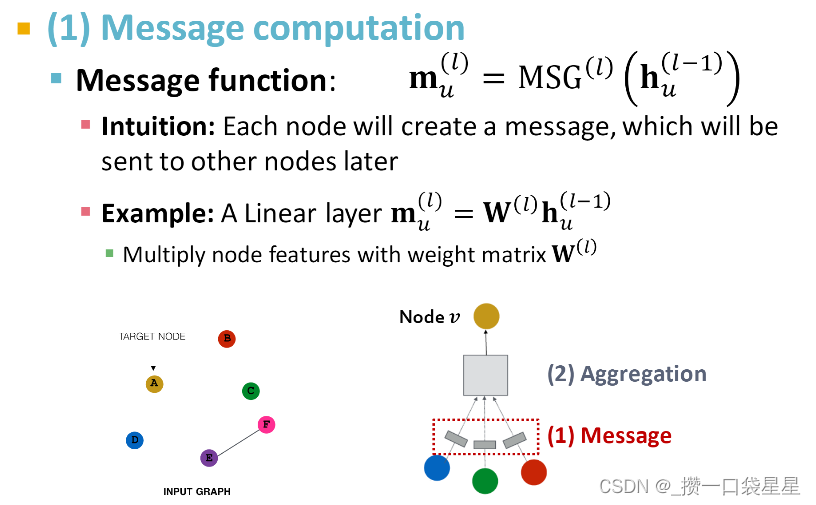
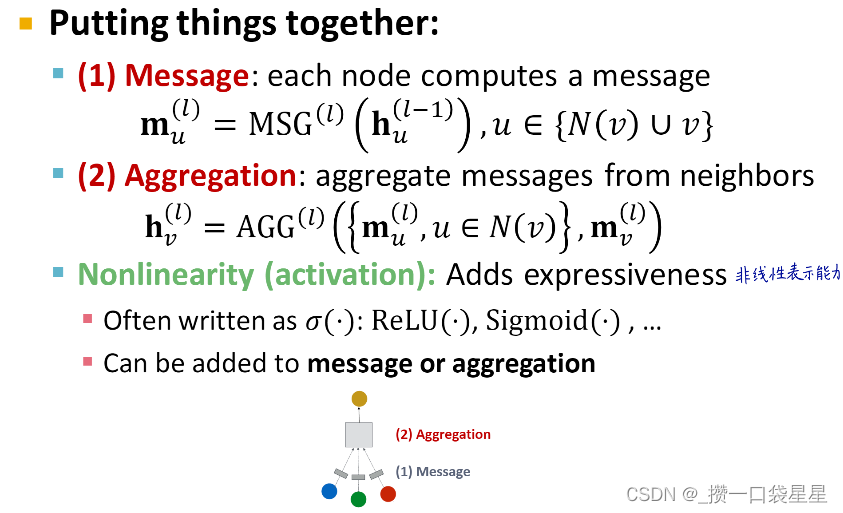
单个GNN layer
信息计算: m u l = M S G l ( h u l − 1 ) m_u^{l} =MSG^l \ (h_u^{l-1}) mul=MSGl (hul−1)
信息聚合: h u l = A G G l ( m u l − 1 , u ∈ N ( v ) ) h_u^{l} =AGG^l \ (m_u^{l-1},u\in\N(v)) hul=AGGl (mul−1,u∈N(v)) -
GNN model
GCN 对应元素求均值+线性+ReLU非线性
GraphSAGE 多层感知器+d对应元素max-pooling

- 可以用不同颜色表示不同的节点嵌入,例如表示节点的属性特征,
- 计算图中通过连接结构区别不同节点
3.2.2 GNN如何区分不同图结构
- 局部邻域结构
- 如果只考虑节点的局部邻域结构
节点度不同,邻居的节点度不同
但是当两节点对称时,仅通过图的连接结构是无法区分的,如下图的节点1、2
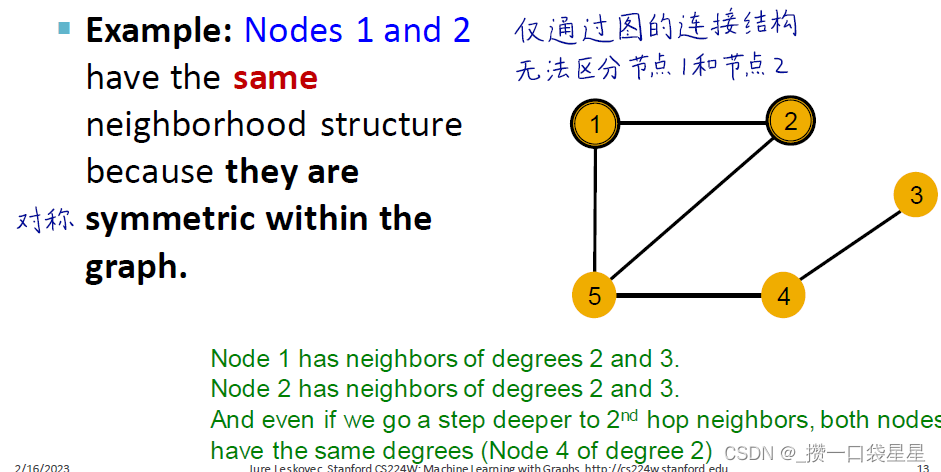
- 关键问题:GNN节点嵌入是都能够区分不同节点的局部邻域结构?
(1)从计算图入手,GNN的表达能力=区分计算图根节点嵌入的能力
在每一层,GNN聚合了邻居节点的嵌入信息,但是GNN 不关心节点编号,它只是聚合了不同节点的特征向量。
不同局部邻域定义不同的计算图,计算图与每个节点周围的根节点子树结构相同
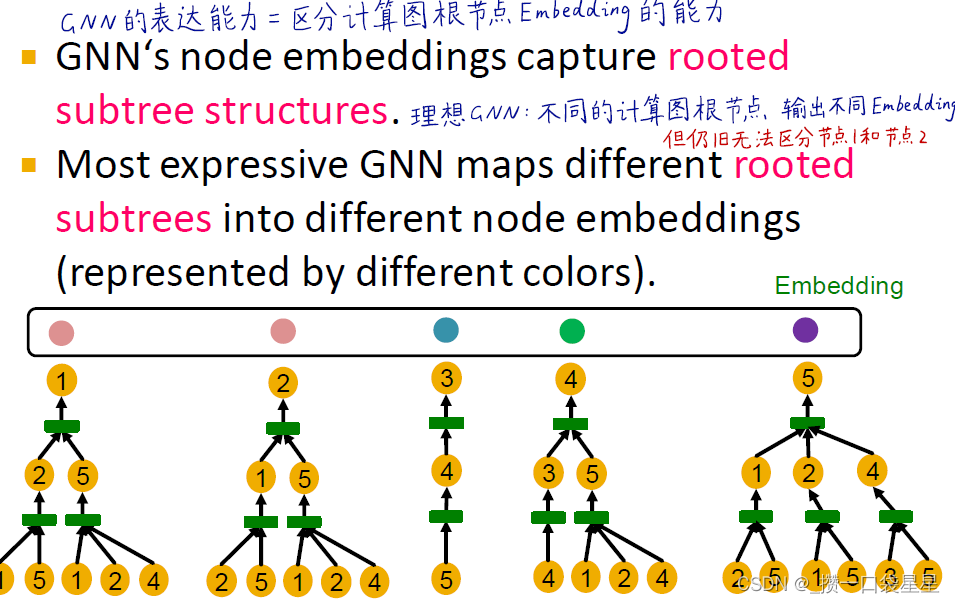
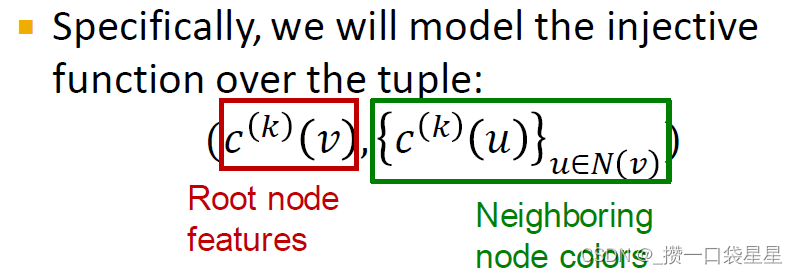
(2)引入单射函数(每个输入对应唯一输出,包含了所有的输入信息)
将不同的根子树映射到不同的节点嵌入中,先获得树的单个级别的结构,然后利用递归算法得到树的整个结构
(3)如果GNN聚合的每一步都可以完全保留相邻信息,则生成的节点嵌入可以区分不同的有根子树
(4)理想GNN:不同的计算图根节点输出不同的Embedding
最具有表达力的GNN:聚合操作应该单射
最完美的单射聚合操作:哈希
3.2.3 设计最具表现力的GNN
- 首先:
- GNN的表达能力可以通过使用邻域聚合函数来表征
- 更具表现力的聚合函数会使得GNN更具表现力
- 单射聚合函数可以得到最具表现力的GNN
-
理论分析聚合函数的表达力
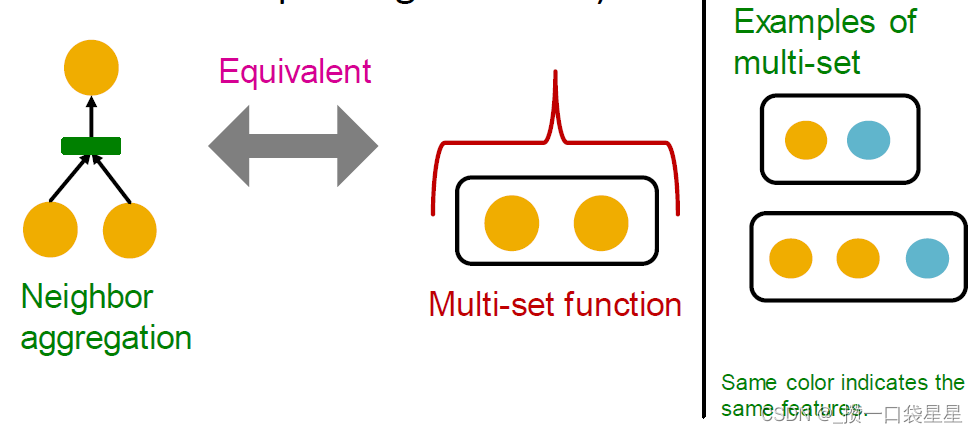
邻居聚合可以概括为一个超集(multi-set,一个有重复元素的集合)函数
-
分析两个GNN模型的聚合函数
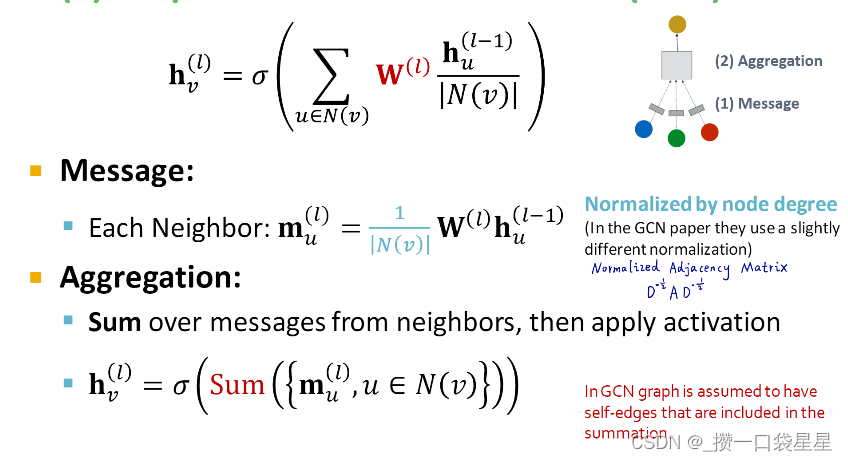
- GCN的聚合函数(平均池化层):逐元素求平均+线性+ReLU激活
无法区分颜色比例相同的不同超集,如下图(比例相同,求均值激活后输出相同),这个就不是单射函数
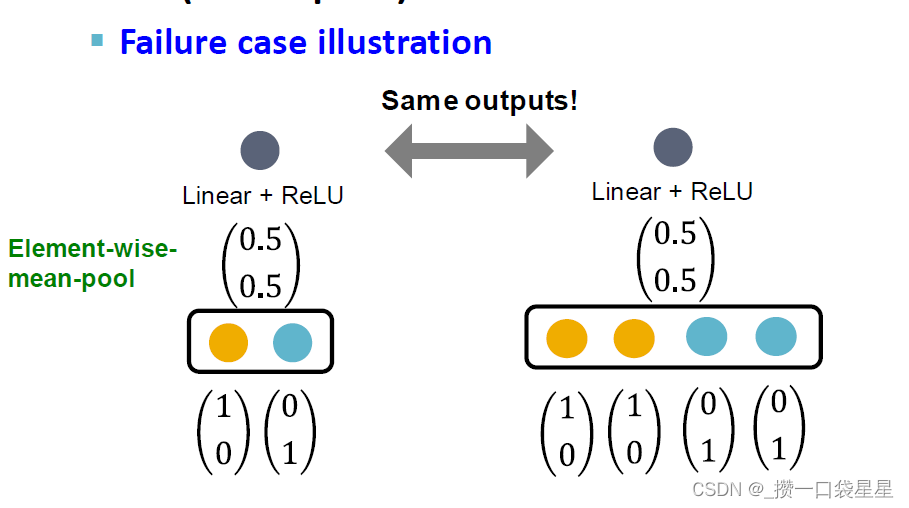
- GraphSAGE的聚合函数无法区分不同的超集与同一集合下的不同颜色,逐元素求最大值

- 小结
- GNN的表达能力可以用邻居聚合函数的表达能力来表征。
- 邻居聚合是一个多集(具有重复元素的集合)上的函数
- GCN和GraphSAGE的聚合函数不能区分一些基本的多集;不是单射。
- GCN和GraphSAGE并不是最强大的GNN
3.2.4 设计表达力最强的GNN—GIN
-
目标:
在信息传递GNN设计表达力最强的GNN,通过在多重集合上设计单射邻域聚合函数来实现
—>用神经网络拟合单射函数(神经网络的万能近似定理) -
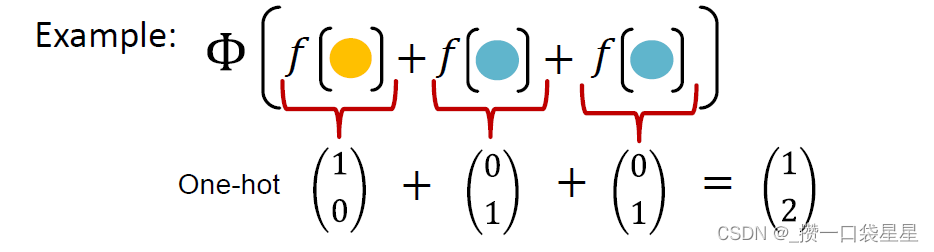
任何单射多集函数都可以表示为 Φ ( ∑ x ∈ S f ( x ) ) \Phi(\sum\limits_{x\in\ S}f(x)) Φ(x∈ S∑f(x))
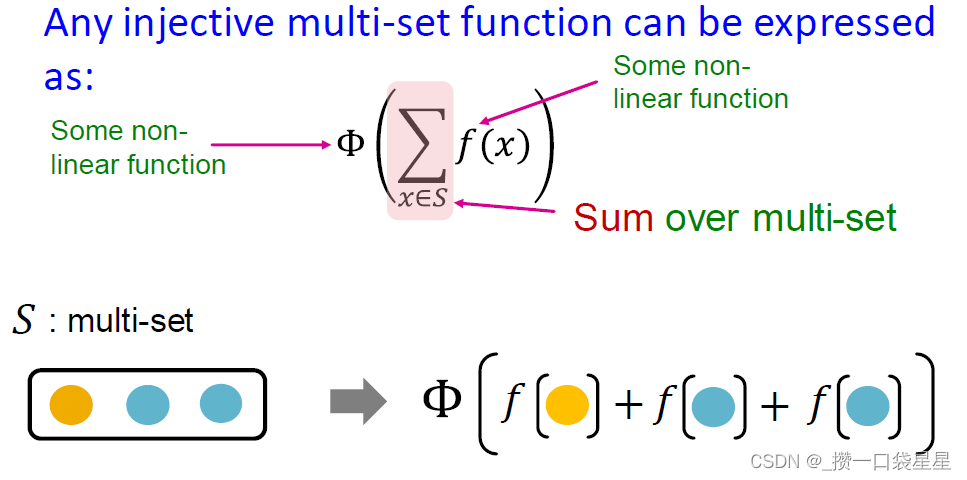
例子:f产生颜色,求和记录颜色个数,Φ是单射函数
-
如何建立Φ和f呢?GIN网络
-
万能近似定理,使用多层感知机
在具有一个隐藏层的MLP模型中,当隐藏层的维度足够大,且使用非线性函数可以将任何连续函数近似到任意精度 -
M L P Φ ( ∑ x ∈ S M L P f ( x ) ) MLP_\Phi(\sum\limits_{x\in\ S}MLP_f(x)) MLPΦ(x∈ S∑MLPf(x))
实际中,MLP隐藏层的维度100-500是足够的
- GIN网络
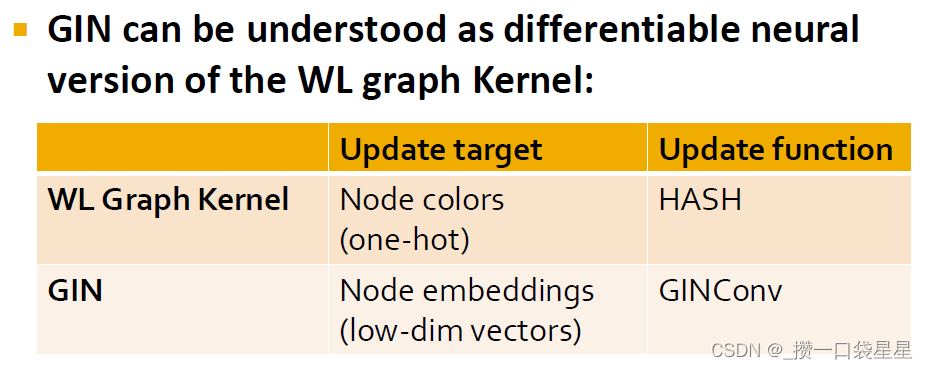
GIN 与 WL 图核(传统提取图级特征的方法见L3)
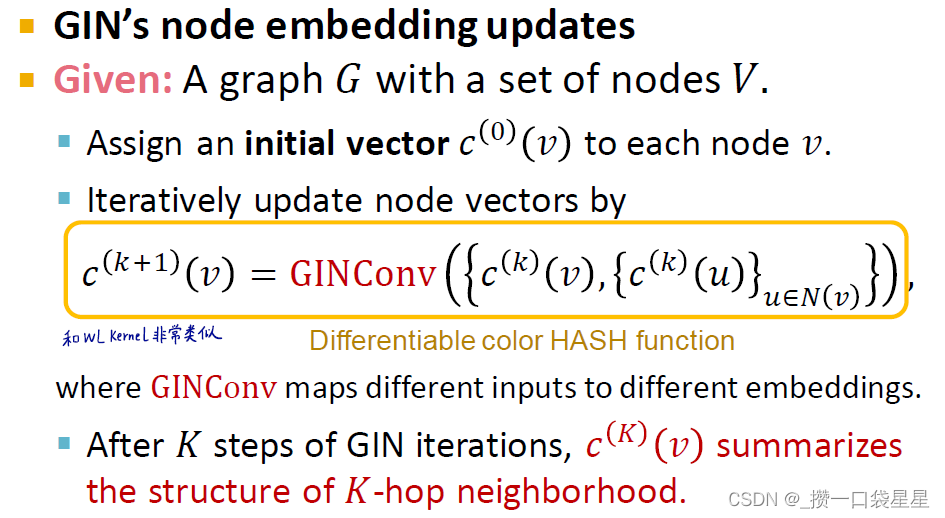
算法步骤:
第一步:初始化每个节点的颜色 c ( 0 ) ( v ) c^{(0)}(v) c(0)(v)
第二步:对节点的颜色进行迭代更新 c ( k + 1 ) ( v ) = H A S H ( c ( k ) ( v ) , c ( k ) ( u ) u ∈ N ( v ) ) c^{(k+1)}(v)=HASH(c^{(k)}(v),{c^{(k)}(u)}_{u\in\ N(v)}) c(k+1)(v)=HASH(c(k)(v),c(k)(u)u∈ N(v))
第三步:迭代停止得到节点 颜色
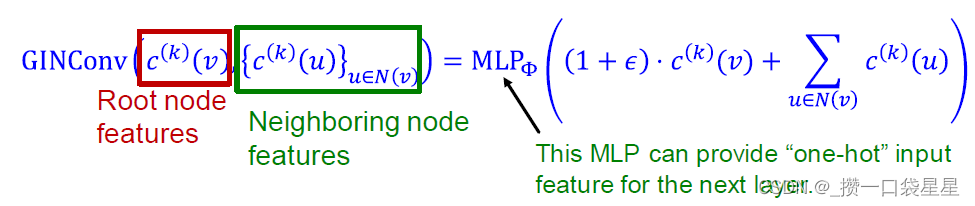
任何一个单射函数可以表述为以下形式: M L P Φ ( ( 1 + ϵ ) M L P f ( c ( k ) ( v ) + ∑ u ∈ N ( v ) M L P f ( c ( k ) ( u ) ) MLP_\Phi((1+\epsilon)MLP_f(c^{(k)}(v)+\sum\limits_{u\in\ N(v)}MLP_f(c^{(k)}(u)) MLPΦ((1+ϵ)MLPf(c(k)(v)+u∈ N(v)∑MLPf(c(k)(u))
如果输入特征
c
(
0
)
(
v
)
c^{(0)}(v)
c(0)(v)表示为独热向量,那么直接求和的函数就是单射函数(不需要f)
单射函数:
5. GIN 与 WL graph kernal
GIN可以理解为WL graph Kernel的可微神经版本
GIN相对于WL图内核的优点:
a.节点嵌入是低维的;因此,它们可以捕获不同节点的细粒度相似性
b.可以根据下游任务学习优化
- 总结
WL是表达能力的上界,如果两个图可以用GIN区分,那么也可以被WL kernal.反之亦然
WL kernal在理论上和经验上可以区分真实世界的大部分图
GIN也足够强大,可以区分大多数真实的图!
3.2.5 问题:对称的依然不能去区别
有循环的依然不能区分
3.2.6 问题与解决方案
- 通用解决方案
- 数据预处理:特征标准化处理
- 优化器:使用ADAM优化器
- 激活函数:ReLU通常效果很良好,可使用LeakyReLU、PReLU等其他激活函数,输出层没有激活函数,每一层包含偏置项
- 嵌入维度:通常选择32、64和128
- 调试深度网络
- Debug问题:损失/准确值在训练时未收敛
- 检查pipeline
- 调整学习率等超参数
- 注意权重参数初始化
- 仔细观察损失函数
- 模型开发:
- 在训练集上存在过拟合情况
用一个小的训练数据集,损失应该基本上接近于O,具有表达性的神经网络 - 检查loss曲线
- 在训练集上存在过拟合情况
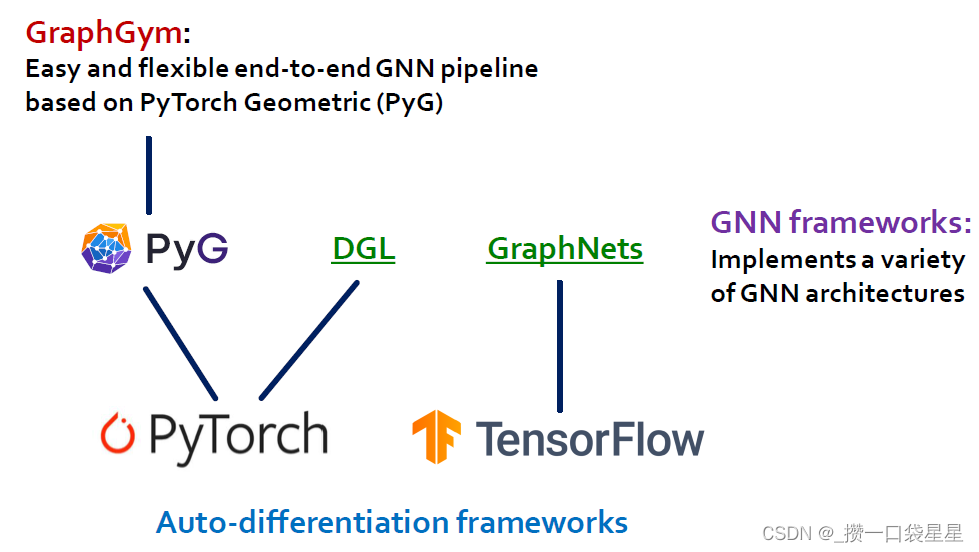
3.2.7 Resources on GNN
用pytorch比较好
3.3 GCN
GCN的基本思想: 把一个节点在图中的高纬度邻接信息降维到一个低维的向量表示。
首先,我们取其所有邻居节点的平均值,包括自身节点。然后,将平均值通过神经网络。请注意,在GCN中,我们仅仅使用一个全连接层。
GCN的优点:
-
- 可以捕捉graph的全局信息,从而很好地表示node的特征。捕捉功能结构角色的信息,deepwalk和node2vec不可以
-
- 充分利用属性信息
-
- 算法复杂度线性增加
GCN的缺点:
- 算法复杂度线性增加
-
- Transductive learning的方式,需要把所有节点都参与训练才能得到node embedding,无法快速得到新node的embedding。
-
- 融合时边权值是固定的,不够灵活。
-
- 层数加深时,结果会极容易平滑,每个点的特征结果都十分相似。
3.3.1 数学形式
- 基本形式
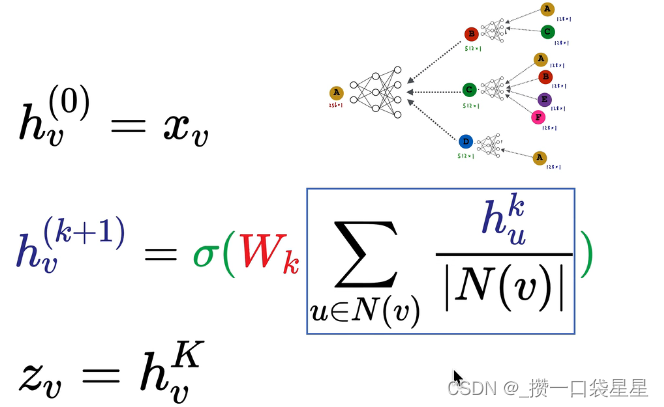
左乘A邻接矩阵是求和,左乘D的逆矩阵是求平均的过程。其中D矩阵是一个度对角矩阵,值为每个节点的连接数
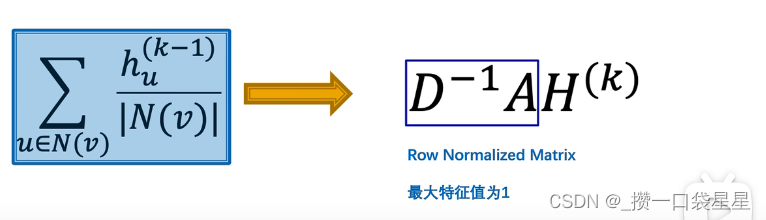
RNM 互为转置,非对称矩阵,最大特征值为1;只按自己的度,对所有渠道来的信息求平均,没有考虑对方的连接数 - 改进:
D
−
1
A
D
−
1
D^{-1}AD^{-1}
D−1AD−1
对称矩阵,既考虑了自己的度,也考虑了对方的度。
特征值在-1至1之间,输入向量左乘该矩阵后,幅值会变小 - 不想幅值变小:
D
−
1
/
2
A
D
−
1
/
2
D^{-1/2}AD^{-1/2}
D−1/2AD−1/2
对称矩阵,特征值在-1至1之间,最大特征值为1
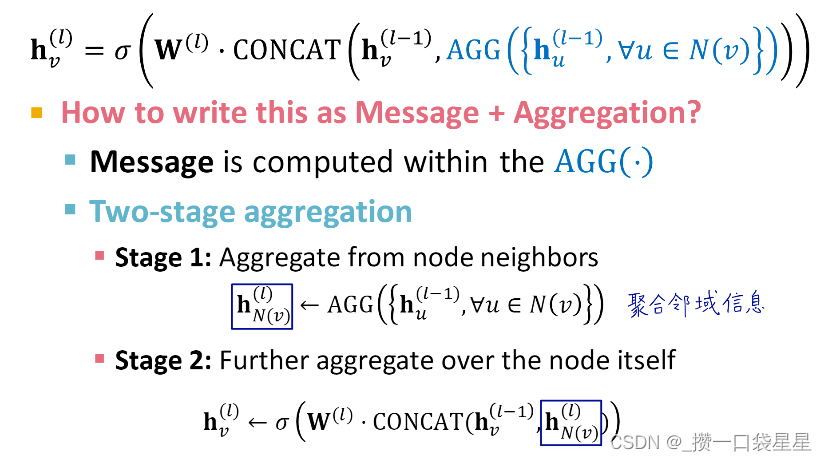
3.3.2 最终形式
有邻域和自己
邻域和自己权重可以不同
3.4 GAT
通过给每条边加了一个模型可学习的系数 ,进行带attention系数的node feature融合,使得在做卷积融合feature的过程,能够根据任务调整模型参数,变得自适应使得效果更好。
3.5 GraphSAGE
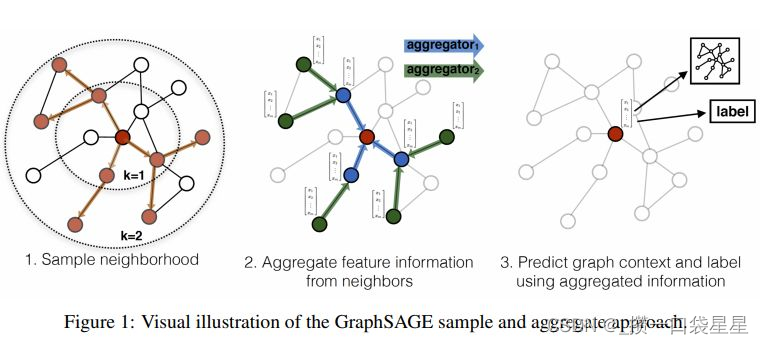
具体的思想就是分三步:
- 采子图:训练过程中,对于每一个节点采用切子图的方法,随机sample出部分的邻居点,作为聚合的feature点。如下图最左边,对于中心点,采两度,同时sample出部分邻居节点组成训练中的子图。
- 聚合:采出子图后,做feature聚合。这里与GCN的方式是一致的,从最外层往里聚合,从而聚合得到中心点的node embedding。聚合这里可操作的地方很多,比如你可以修改聚合函数(一般是用的mean、sum,pooling等),或增加边权值都是可以的。
- 任务预测:得到node embedding后,就可以接下游任务了,比如做node classification,node embedding后接一个linear层+softmax做分类即可。
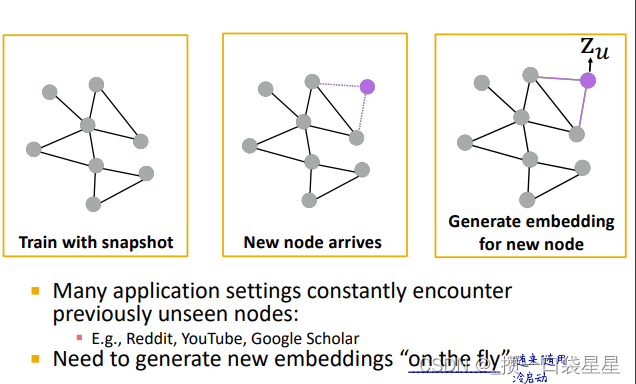
1.解决了预测中unseen nodes的问题,原来的GCN训练时,需要看到所有nodes的图数据。2.解决了图规模较大,全图进行梯度更新,内存消耗大,计算慢的问题















 496
496











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









