






1.问题的引出
在我的上一篇PIR(比例积分谐振;Resonant谐振,R)谐波抑制中,讲了离散化对PIR的影响。然后呢,通过采用更高精度的离散化,以及PWM的1.5拍延时补偿,提高的PIR的稳定性。实现了在1200RPM(4对极,10kHz控制频率)情况下,对dq电流中的六次谐波电流(相电流中的五七次谐波电流)进行了有效抑制。
 https://zhuanlan.zhihu.com/p/695101488
https://zhuanlan.zhihu.com/p/695101488但是!虽然采用了更高精度的离散化,以及PWM的1.5拍延时补偿,但是系统延时其实还没有消除!所以这样的PIR控制器,还是很容易失去稳定的!
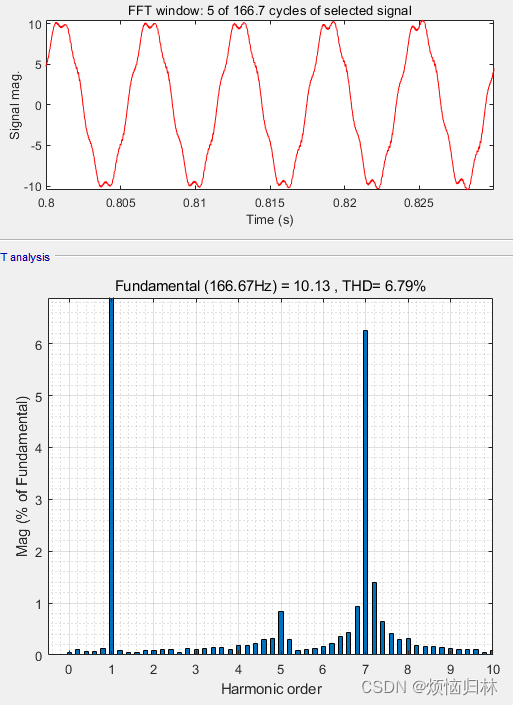
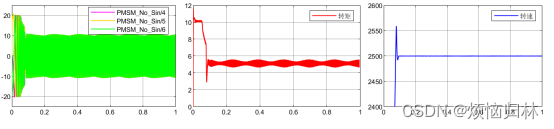
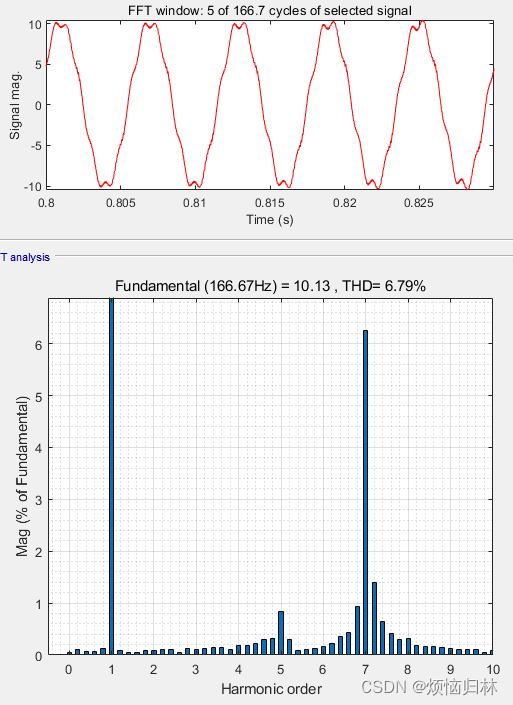
比如下面的仿真情况,我把电机转速从原来的1200RPM提高到了2500RPM,这时候,电机出现了非常非常明显的转矩脉动,这个转矩脉动很大!相电流也不再正弦了,出现了很明显的谐波电流,相电流THD为6.79%。
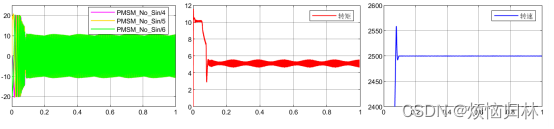
为什么会出现这样的原因呢?
虽然说我们上一期内容补偿了PWM的1.5拍延时。但是系统的延时并没有消失。
值得注意的是,补偿PWM1.5拍延时作用,只是保证1.5个控制周期之后,SVPWM产生的实际dq电压等于当前控制器产生的参考dq电压。
此时系统中还有1.5拍的控制延时没有消除。这一点应该如何理解呢?
比如说你是一个猎人正在打鸟,你现在按照鸟儿的位置,射出去了一发子弹。但是这个子弹需要1.5s才会到达鸟儿所在的位置。可在1.5s之后,鸟儿还一定在原来的位置上面吗?
当然不一定了。
所以前文用的PIR相当于没有考虑1.5拍之后,交流量的相位变化!所以系统就没办法在2500PRM抑制谐波了!
2.具有相位补偿的PIR调节器
为了解决这一问题,我们就需要引入具有相位补偿的PIR调节器。具体同样参考下面这个大神写的关于R调节器的知乎。
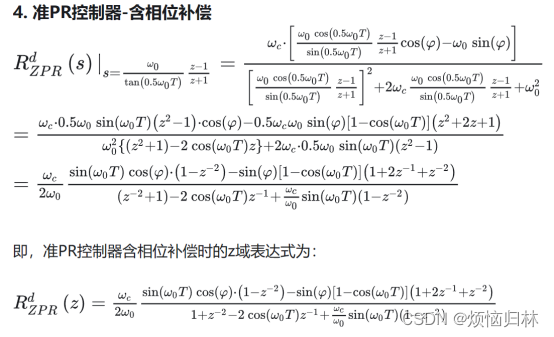
2.1具有相位补偿的PIR调节器的表达式
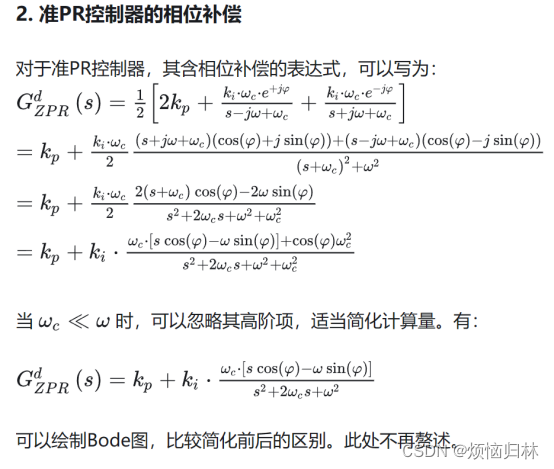
上面这是连续域的相位补偿PR调节的表达式,下面是离散域的相位补偿PR调节的表达式。
2.2为什么相位补偿能提高系统的稳定性?
参考文献:
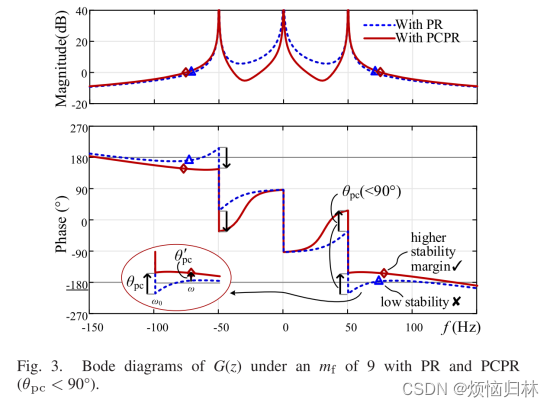
文章中画了一个伯德图进行对比。红色的线代表具有相位补偿的PR调节器的bode图;蓝色的线代表普通的PR调节器的bode图。这个图评估的有无相位补偿对系统稳定性的影响。
注意:在电机系统中的系统延时一般是1.5拍,即PWM装载的一拍延时以及PWM形成的半拍延时。所以需要补偿的相位Phase = 1.5*we*Ts,we是电角速度,Ts是控制周期。
看图中,蓝色的线的相位滞后最大超过了-180°,相位滞后达到-180°,系统会形成一个正反馈,然后崩溃;而具有相位补偿的PR调节减小了相位滞后,最大相位滞后不超过-180°,所以系统相对稳定。
我把我电机参数以及设定的PIR调节器参数带到电机电流环的传递函数里面,画了个Bode图看看效果。
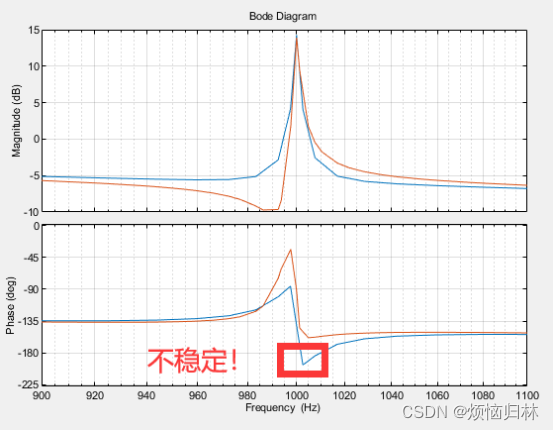
同样的,红色的线代表具有相位补偿的PIR调节器的bode图;蓝色的线代表普通的PIR调节器的bode图。可以看到,在2500RPM的情况下,普通的PIR调节器的相位滞后已经达到了180°,所以系统不稳定了!
(可以大概算一下,2500RPM,4对极,6倍频的谐波的频率为=1000Hz,R调节器的最大幅值对应的频率确实是1000Hz,所以这个图没画错)
3.仿真对比
3.1仿真参数
Tpwm = 1e-4;%开关周期
Tsample = Tpwm/1;%电流采样周期
Tspeed = Tsample;%转速采样周期
Ts = 5e-7;%仿真步长
Pn = 4;%电机极对数
Ls = 8.5e-3;%定子电感,采用隐极的,Ld=Lq=Ls
Ld = Ls;
Lq = Ls;
Rs = 3;%定子电阻
flux = 0.1688/2;%永磁体磁链
B = 0.0004924;
J = 0.0013;
%控制器中的电感、电阻参数(影响PI)
Ld1 = Ld*1;
Lq1 = Lq*1;
Rs1 = Rs;
%谐波反电势参数
theta5 = 0;
theta7 = 0;
Flux5 = flux*0.01;
Flux7 = flux*0.01;
Vdc = 311;%直流母线电压
iqmax = 20;%额定电流
Tdead = 0e-6;%死区时间
fc = 500;%电流环PI调节器的带宽
Kr = 500;%电流环R调节器的谐振增益
wc = 5;%电流环R调节器的谐振带宽
3.2传统PIR在2500RPM的仿真波形
3.3具有相位补偿PIR在2500RPM的仿真波形
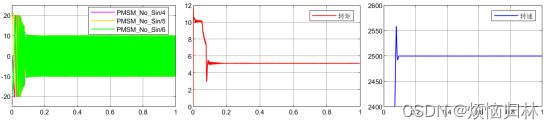
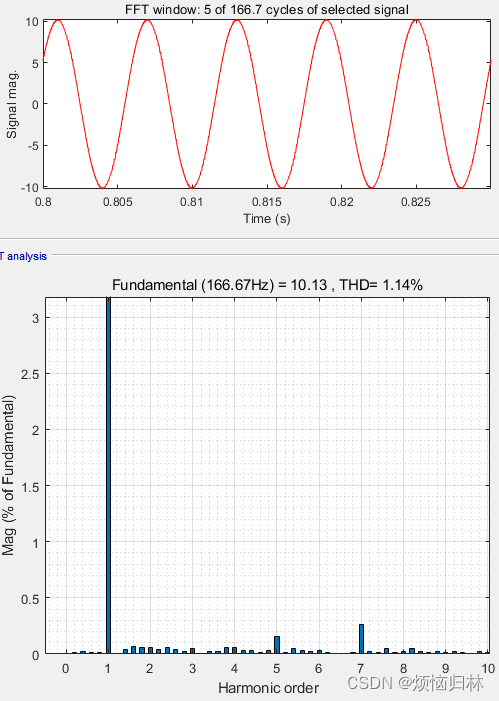
可以非常明显的看到,采用具有相位补偿滞后的PIR调节器,电机的转矩脉动明显消失了;相电流THD由原来的6.79%降低到1.14%,五七次谐波电流含量不超过0.25%。
3.4具有相位补偿PIR在3600RPM的仿真波形
先画个bode图看看,具有相位补偿PIR在3000RPM对应的谐波频率下,相位滞后没有到180°,所以系统还是稳定的。
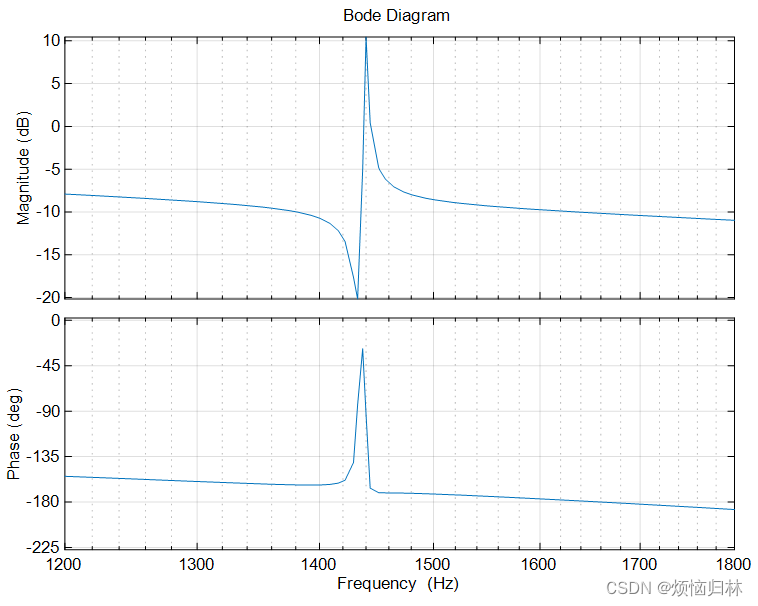
这时候系统的相位裕度非常小了,以及快达到180°了。
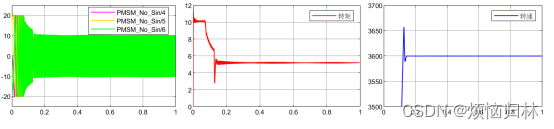
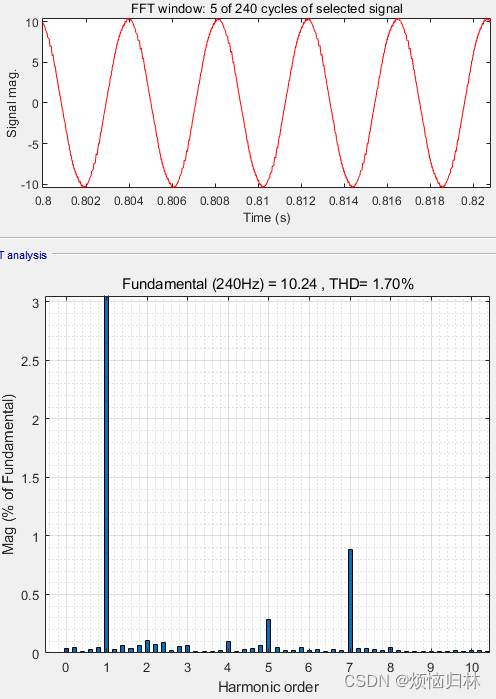
可以看到,这时候电流的正弦度还是不错的,THD有1.7%,五七次谐波电流含量也都在1%以下。
值得注意的是,这时候谐波频率/控制频率已经进入了一个低载波比的情况。
3600RPM,4对极,6倍频的谐波频率是1440Hz,控制频率是10kHz,载波比是6.94。
载波比小于10,能达到这样的谐波抑制效果已经很不错了。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











