






1.引言
在之前的内容中介绍过级联ESO以及谐振ESO,链接如下。
https://zhuanlan.zhihu.com/p/6368468807![]() https://zhuanlan.zhihu.com/p/6368468807
https://zhuanlan.zhihu.com/p/6368468807
https://zhuanlan.zhihu.com/p/16601763859![]() https://zhuanlan.zhihu.com/p/16601763859
https://zhuanlan.zhihu.com/p/16601763859
当时用的是电流环。其实把级联ESO以及谐振ESO用在转速环也是一个道理。参考文献如下:
(1)电流环的级联ESO+谐振
(2)转速环的级联ESO+谐振
这两篇论文基本上讲的都是同一个东西,只不过应用的对象不同罢了。感觉这种属于组合出来的创新点,大家很容易想到一块的。
这次就来做一下比较详细的对比吧。对比的对象有四个:
1.传统PI转速环,
2.传统LADRC转速环,
3.级联LADRC转速环,
4.级联LADRC+谐振转速环。
本文的第二节先对比传统PI转速环和传统LADRC转速环;第三节对比传统LADRC转速环、级联LADRC转速环以及级联LADRC+谐振转速环。
2.转速环PI和传统LADRC的对比
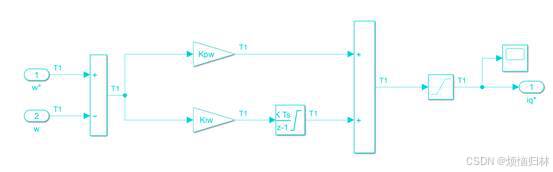
传统PI转速环结构图
传统PI转速环的三相电流、转矩、转速波形
传统LADRC转速环结构图(采用代码编写)
传统LADRC转速环的三相电流、转矩、转速波形
传统PI转速环的三相电流、转矩、转速波形(1000RPM加速至2000RPM)
传统LADRC转速环的三相电流、转矩、转速波形(1000RPM加速至2000RPM)
可以看到,相对于传统PI转速环而言,传统LADRC转速环可以明显减小转速的超调量,使转速能够较快地达到参考值。
但值得注意的是,LADRC转速环的控制律是需要转动惯量这个参数的(如下图公式所示)。所以最好是在LADRC转速环上面加个转动惯量的辨识。

最近发现一种比较精确的转动惯量辨识方法,其实用的也是我参数辨识专题里面的方法,只不过是把里面的方法应用在转速环了,发现效果还是很好的,转动惯量辨识误差只有不到2%。这两天打算去实验看看效果。(后续有空再说机械参数的辨识)
3.三种自抗扰转速环的对比
本节将对比传统LADRC转速环、级联LADRC转速环以及级联LADRC+谐振转速环。
首先对比传统LADRC转速环和级联LADRC转速环。接着对比级联LADRC转速环和级联LADRC+谐振转速环。
仿真参数:
Ts = 5e-7;%仿真步长
Tpwm = 1e-4;%开关周期
Tsample = Tpwm/1;%采样周期/控制周期
Tspeed = 2*Tsample;%转速采样周期
D = 5;
Pn = 5;%电机极对数
Ld = 2e-3;%定子电感,采用隐极的,Ld=Lq=Ls
Lq = Ld;
Rs = 0.62;%定子电阻
flux = 0.042;%永磁体磁链
Vdc=130;%直流母线电压
iqmax=20;%额定电流
Te_limit=1.5*Pn*iqmax*flux;%最大转矩
Tdead = 0.5e-6;%死区时间
J = 1e-3;%转动惯量
B = 5e-3;%阻尼系数
n_init = 0;%初始转速
fc_lpf = 500;%转速计算的低通滤波器截止频率
%转速环参数
Kpw = 100;
wc = 200;
J1 = 1*J;
3.1传统LADRC和级联LADRC转速环的对比
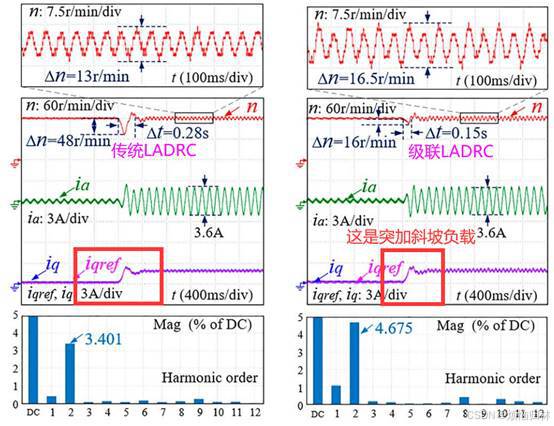
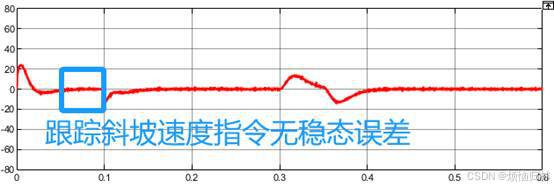
级联LADRC的好处在于,能够无差跟踪斜坡指令;而传统LADRC不能。下图是参考文献中的实验波形。值得注意的是,它这个实验中,做的是突加斜坡负载而不是阶跃的负载。为什么实验中会是突加斜坡负载呢?因为它实验平台用的是磁粉/磁滞制动器,这类制动器不太能做突加阶跃负载的实验,磁粉/磁滞制动器产生的阻力是慢慢上升的。如果实验中的负载是用电机产生的话,是可以做突加阶跃负载的实验。
下面是仿真波形(0.1s前按斜坡指令跟踪转速至2000r/min,0.3s处突加斜坡负载指令):
传统LADRC转速环的三相电流、转矩、转速波形
级联LADRC转速环的三相电流、转矩、转速波形
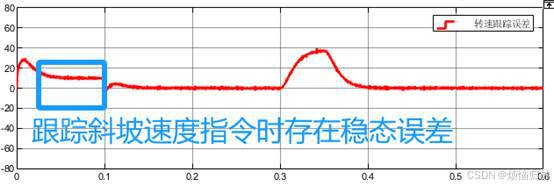
传统LADRC转速环的转速跟踪误差波形
级联LADRC转速环的转速跟踪误差波形
从上述仿真可以看到,相比于传统LADRC转速环,级联LADRC转速环在跟踪斜坡速度指令时,可以实现无稳态误差;且级联LADRC转速环在跟踪斜坡负载(0.3s至0.35s这段时间)时的转速误差更小。
3.2级联LADRC和级联LADRC+谐振转速环的对比
加入谐振控制器/观测器的好处在于,能够抑制交流扰动;而无谐振的级联LADRC不能。下图是参考文献中的实验波形。
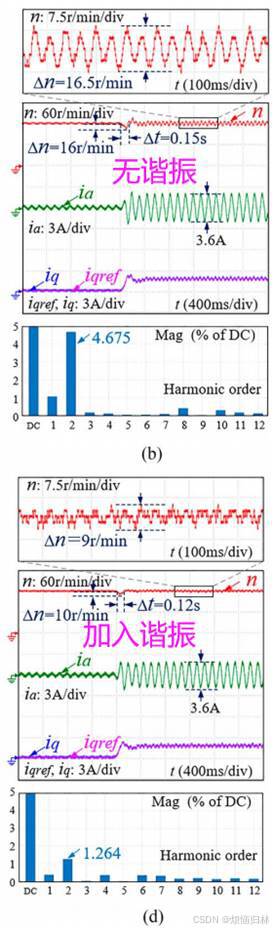
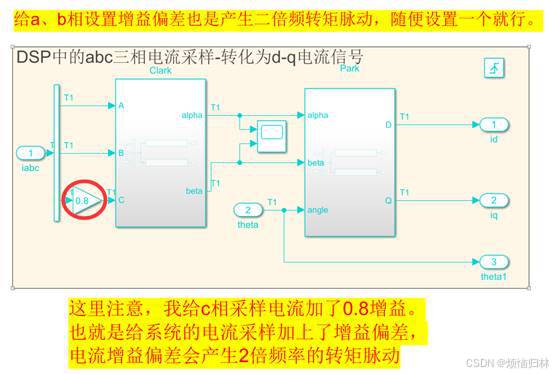
在仿真中,为了突出谐振的作用,我需要在仿真中先加入交流扰动。我这里参考论文里的情况,给电流采样加入增益误差,这样会使得电机出现2倍频的转矩脉动。
下面是仿真对比(0.1s前按斜坡指令跟踪转速至2000r/min,0.3s处突加斜坡负载指令):
级联LADRC转速环的三相电流、转矩、转速波形(转矩脉动很大)
级联LADRC+谐振转速环的三相电流、转矩、转速波形(转矩脉动被抑制)
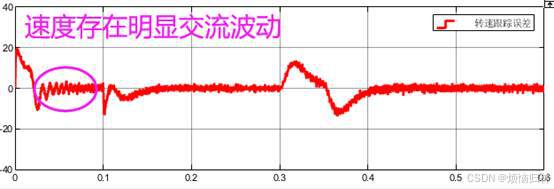
级联LADRC转速环的转速跟踪误差波形
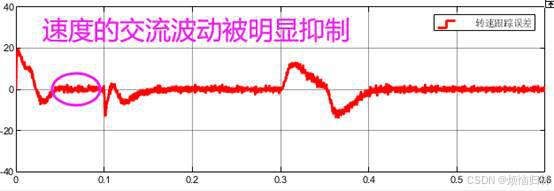
级联LADRC+谐振转速环的转速跟踪误差波形
从上述仿真可以看到,相比于级联LADRC转速环,级联LADRC+谐振转速环可以有效抑制转矩脉动,同时使得转速更平滑。
4.总结
优点:
传统LADRC转速环:相比于PI转速环,可以减少超调量。
级联LADRC转速环:相比于传统LADRC转速环,可以有效跟踪斜坡速度指令和抵抗斜坡扰动。
级联LADRC+谐振转速环:相比于级联LADRC转速环,可以有效抑制转矩脉动,实现更平滑的速度控制。
缺点:
LADRC转速环需要转动惯量参数,转动惯量不准确时会恶化控制性能。如果能在LADRC转速环中加入转动惯量辨识的话,当然是更好的。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











