







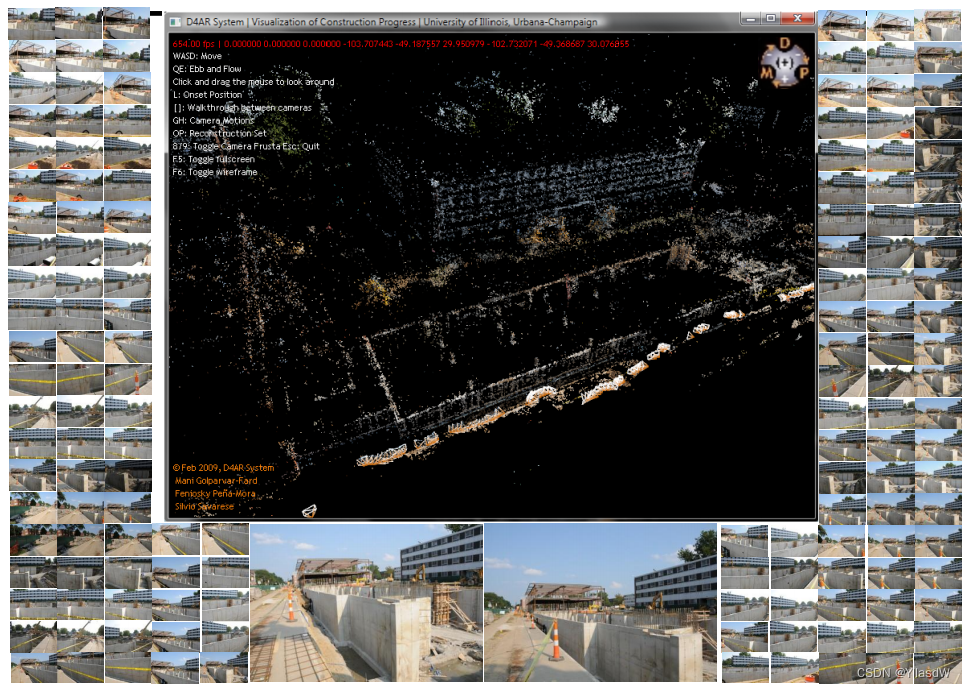
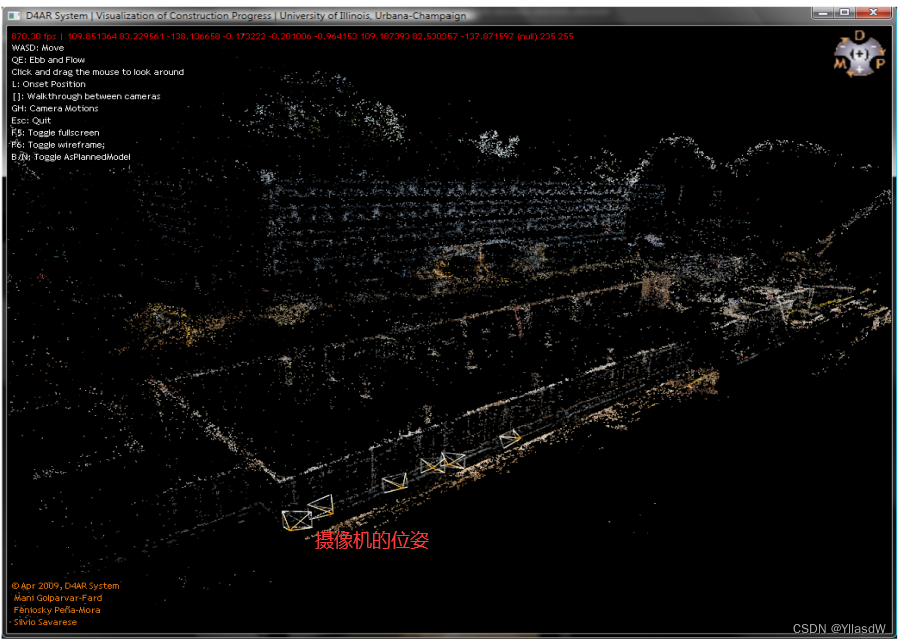
运动恢复结构问题(Sfm)
通过三维场景的多张图像,恢复出该场景的三维结构信息以及每张图片对应的摄像机参数.
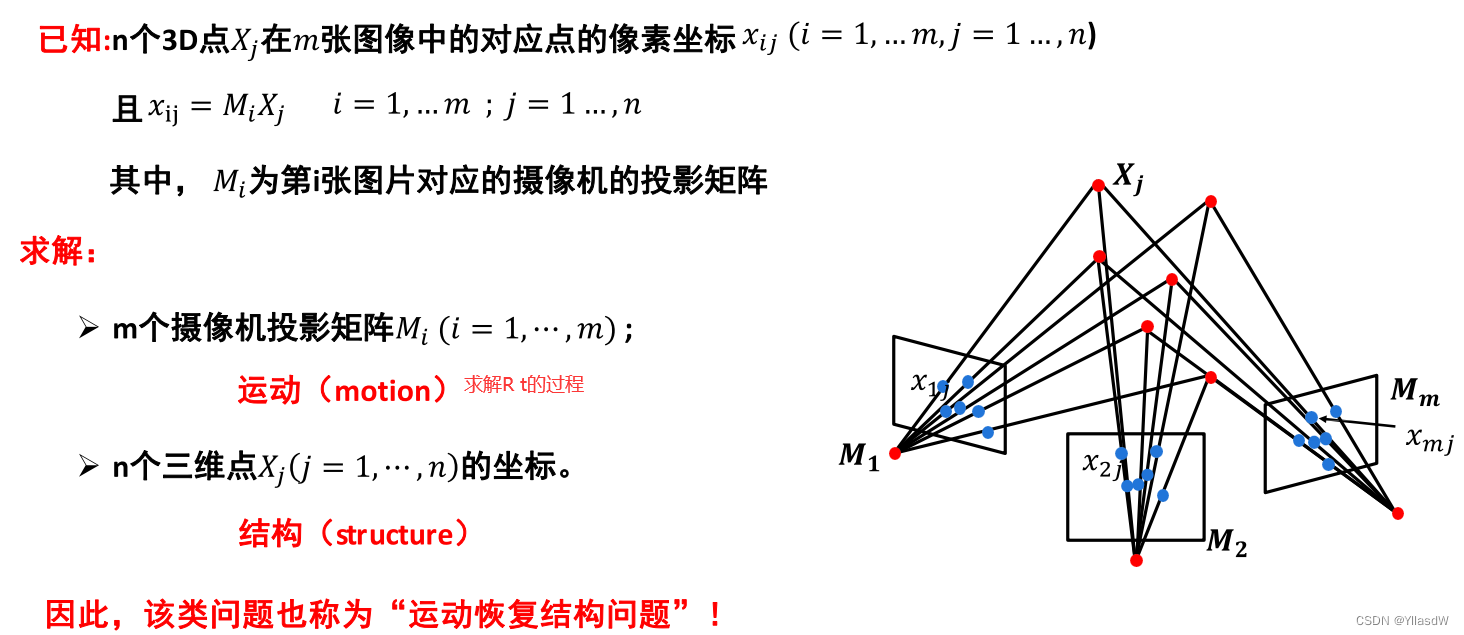
已知:n个3D点在m张图片之中对应的像素坐标,其中知道Mi为第i张图片对应的摄像机的投影矩阵.
求解:m个摄像机的投影矩阵Mi,n个三维点的坐标.
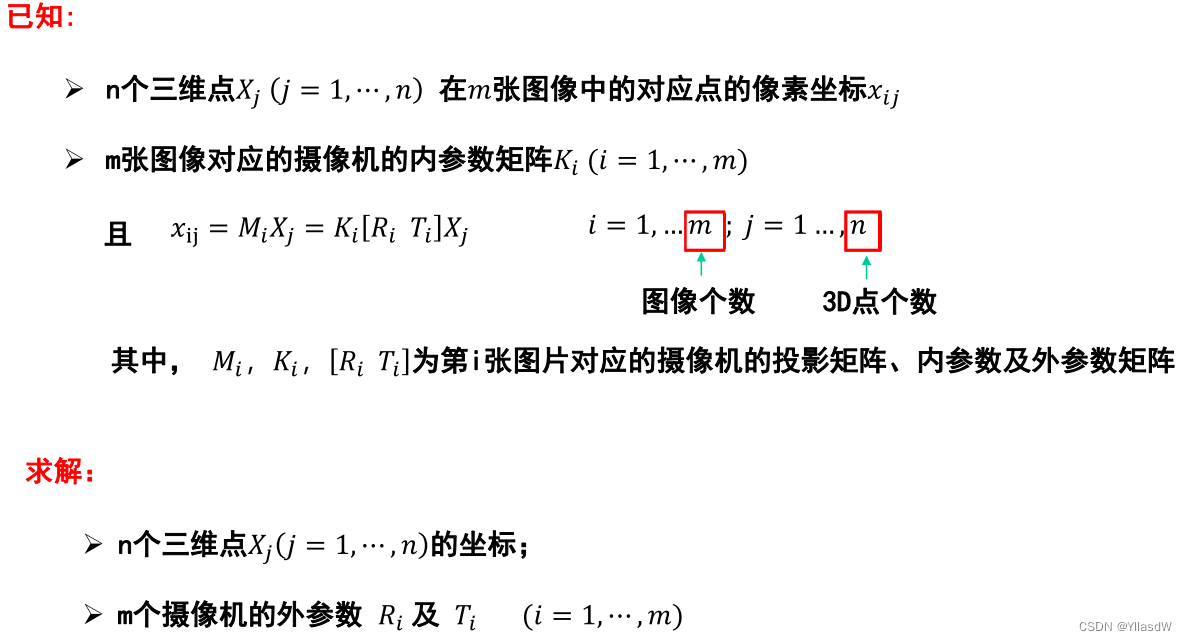
欧式结构恢复(摄像机的内参数已知,外参数未知------项目)
- 已知量和求解量
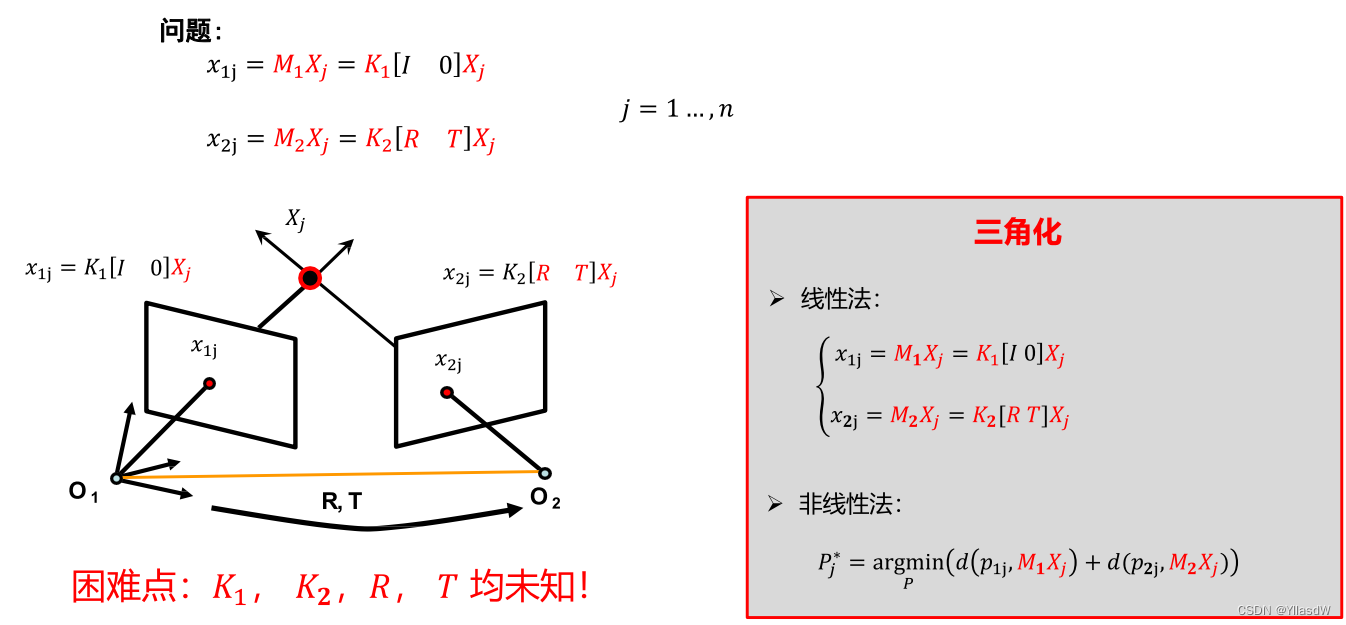
- 三维重建之三角化(这个地方前面是已经学过的)
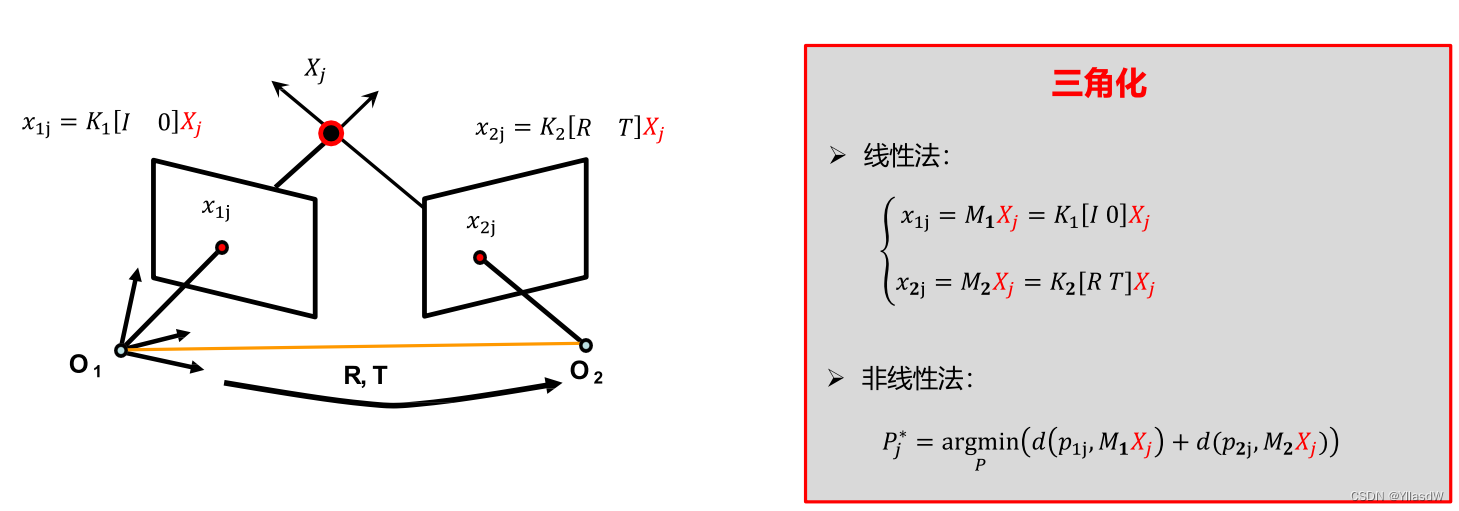
如下所示,将世界坐标系放在第一个相机的原点位置,可以知道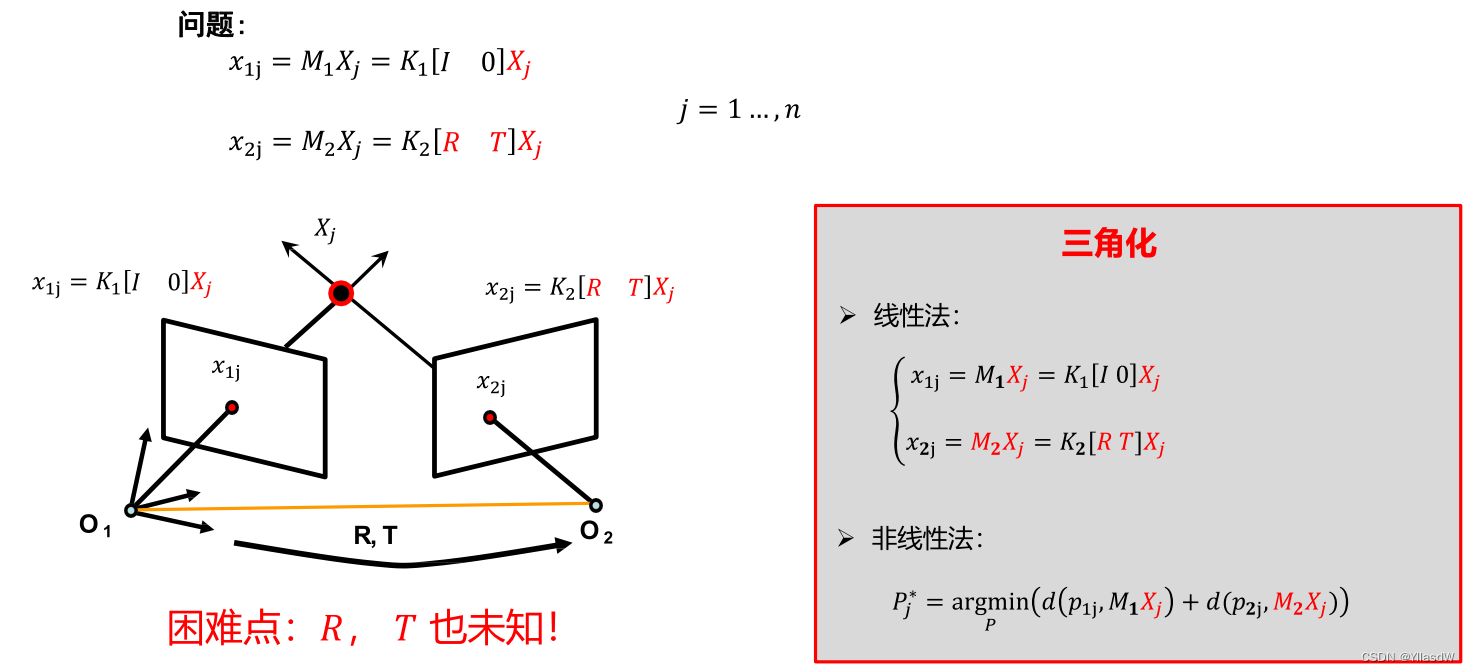
上述之中的困难点是在于红色字体标出的位置都是未知的,因此在三角化会出现很多的问题.
欧式运动问题的解决恢复.
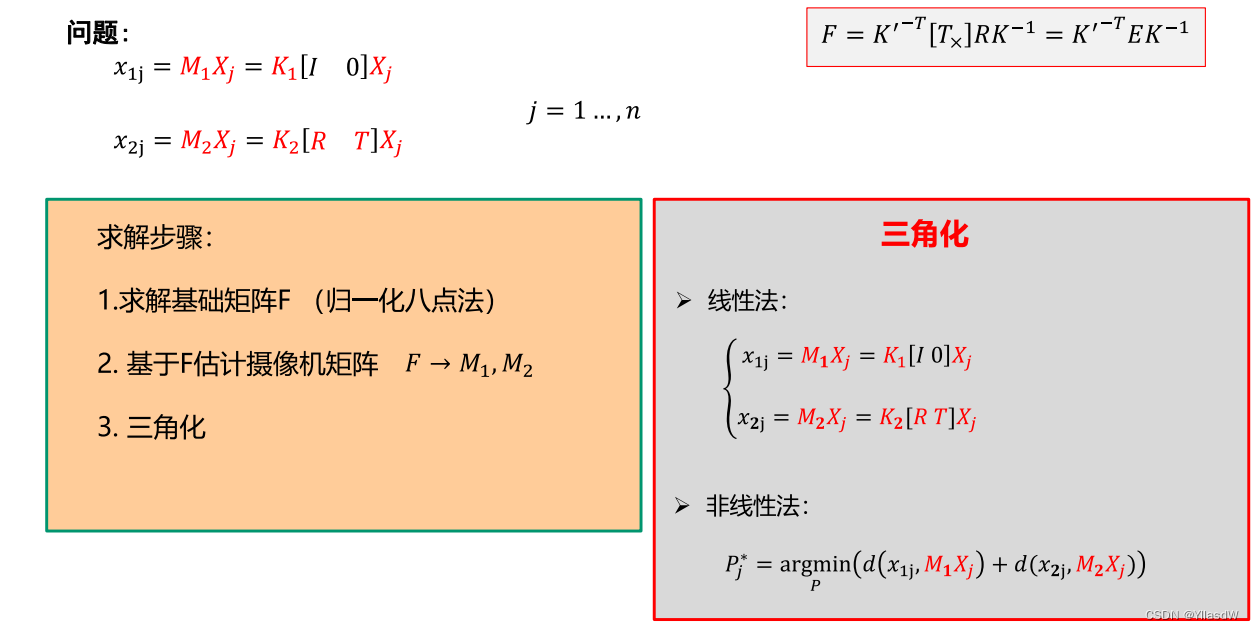
解决上述问题的方式
本质矩阵之中存在R和T。
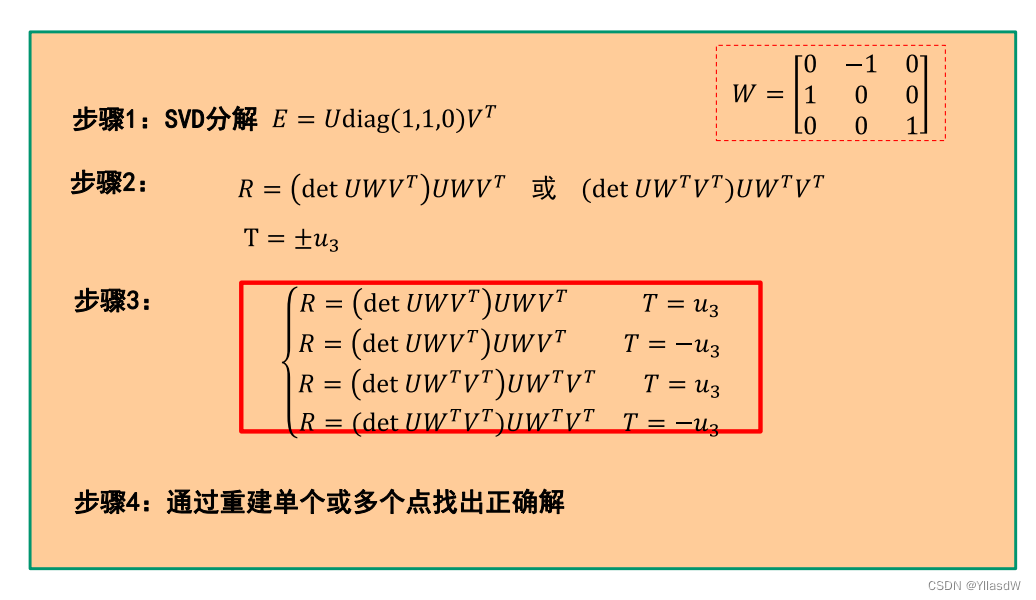
- 解决过程
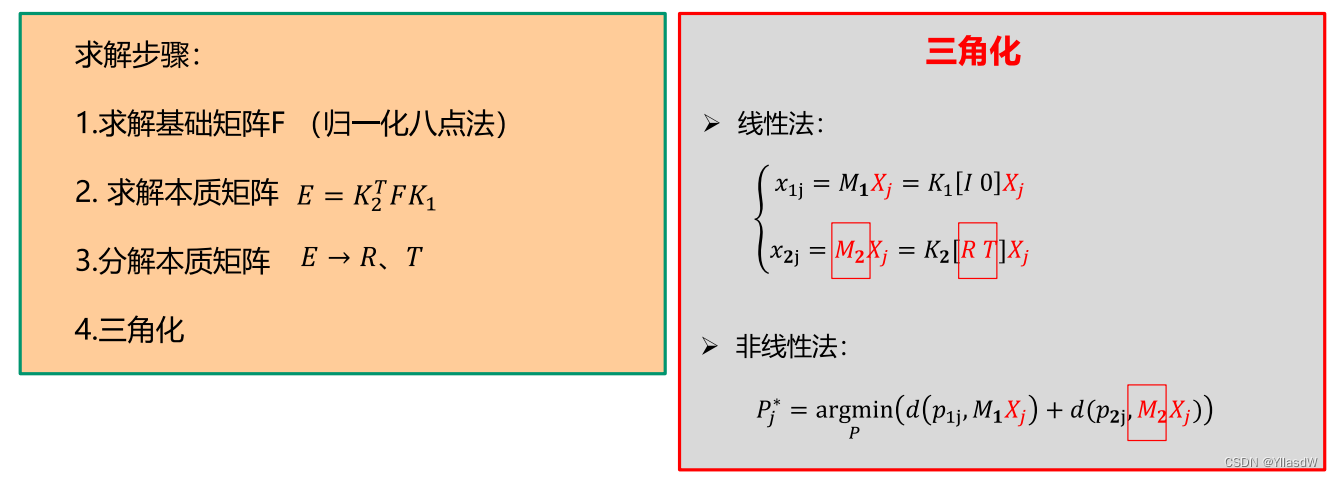
- 这里的核心是第三步,进行本质矩阵的分解。
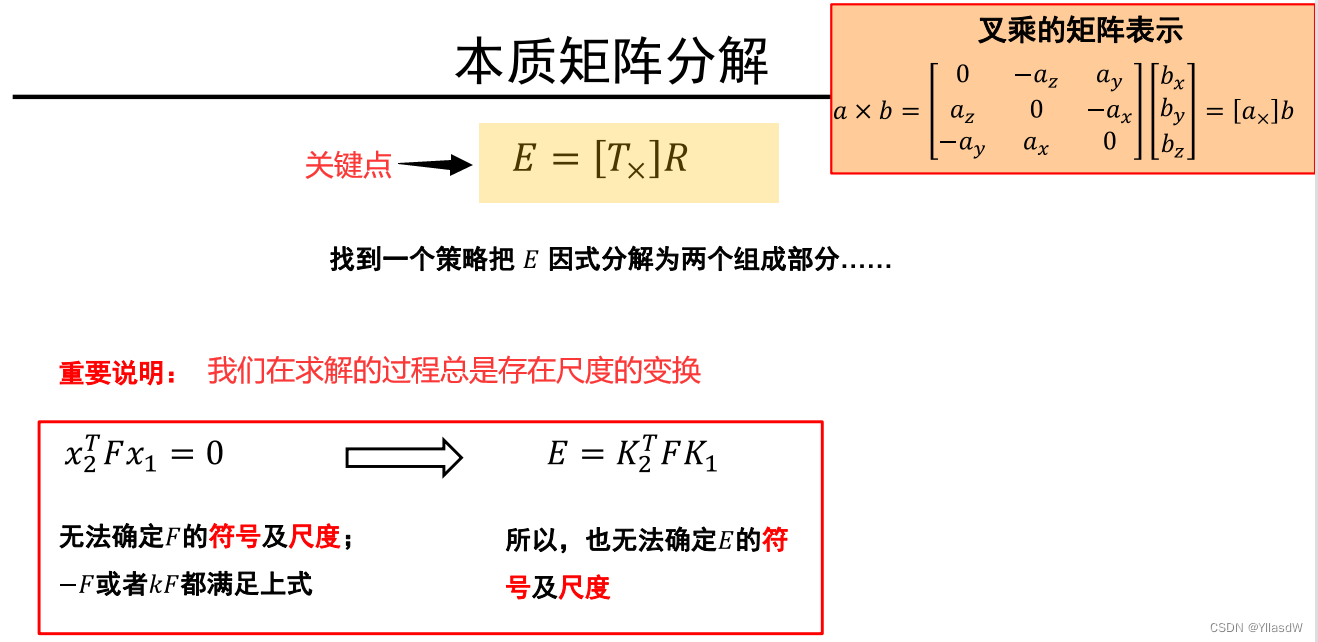
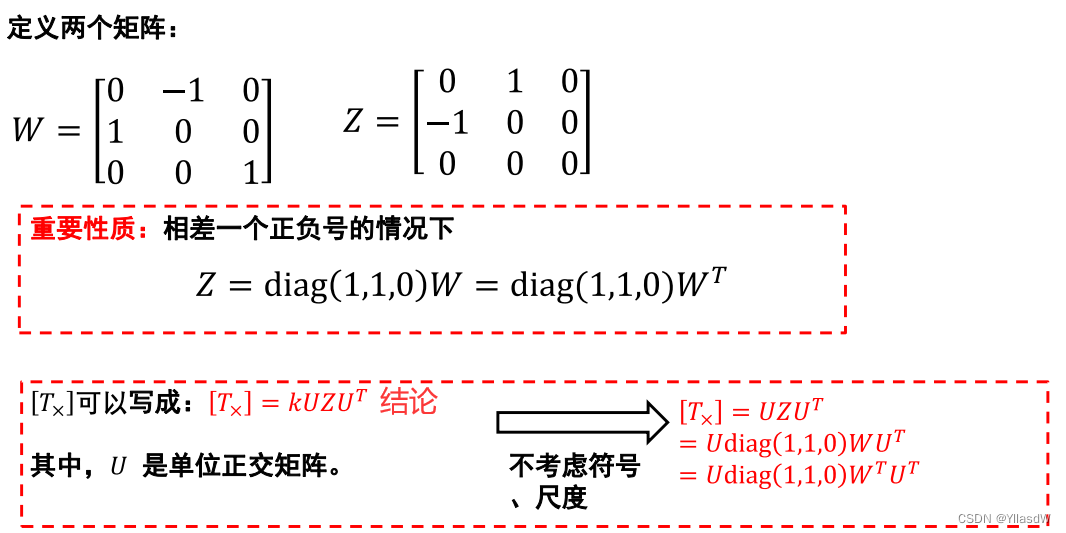
上面的[Tx]是确定的,从而可以直接将相应的。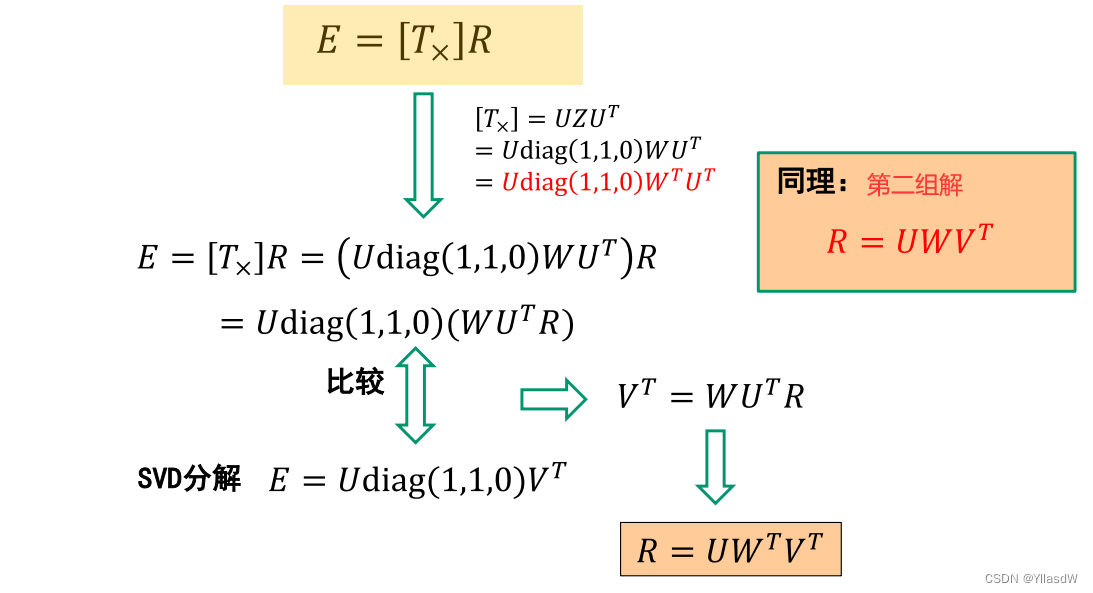
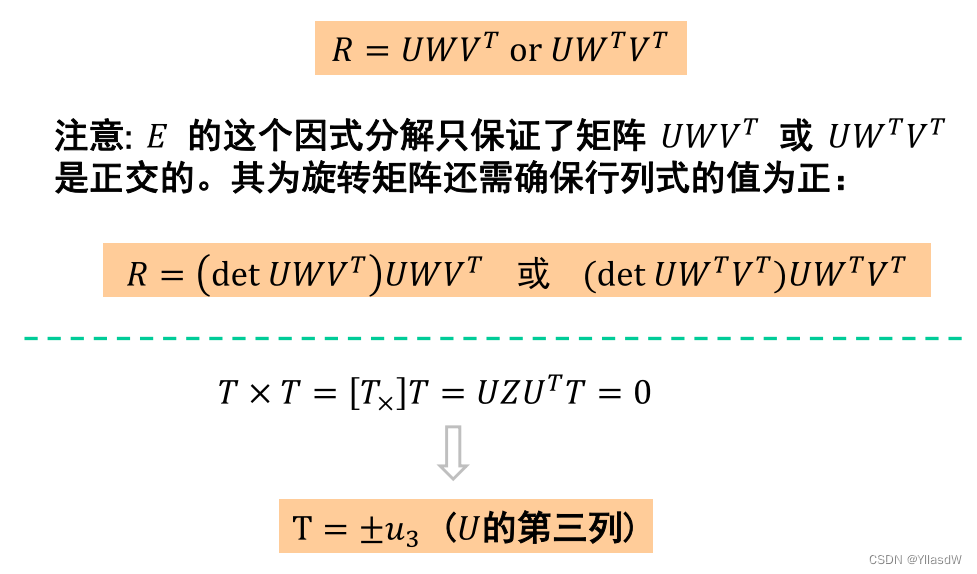
由于R为旋转矩阵,因此保证行列式是为正的,如果要是负数,表示是一个镜像。
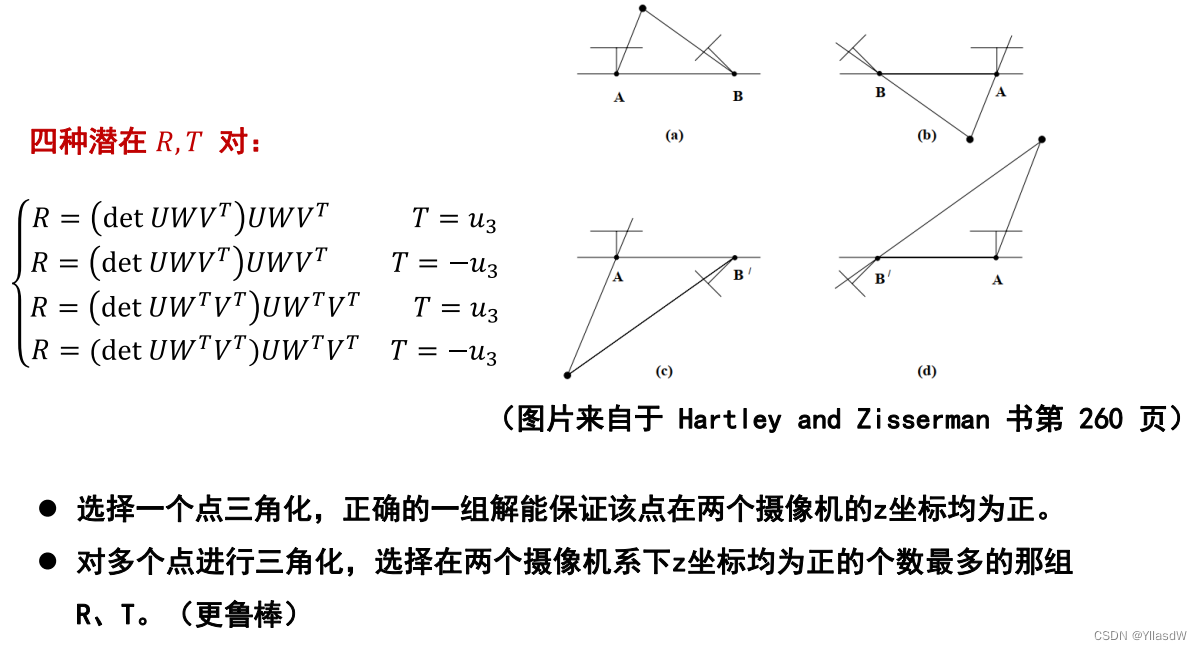
- 本质矩阵的分解
仿射结构恢复(摄像机为仿射相机,内、外参数均是未知的)
项目用不到
透视结构恢复
捆绑调整在后续会用上
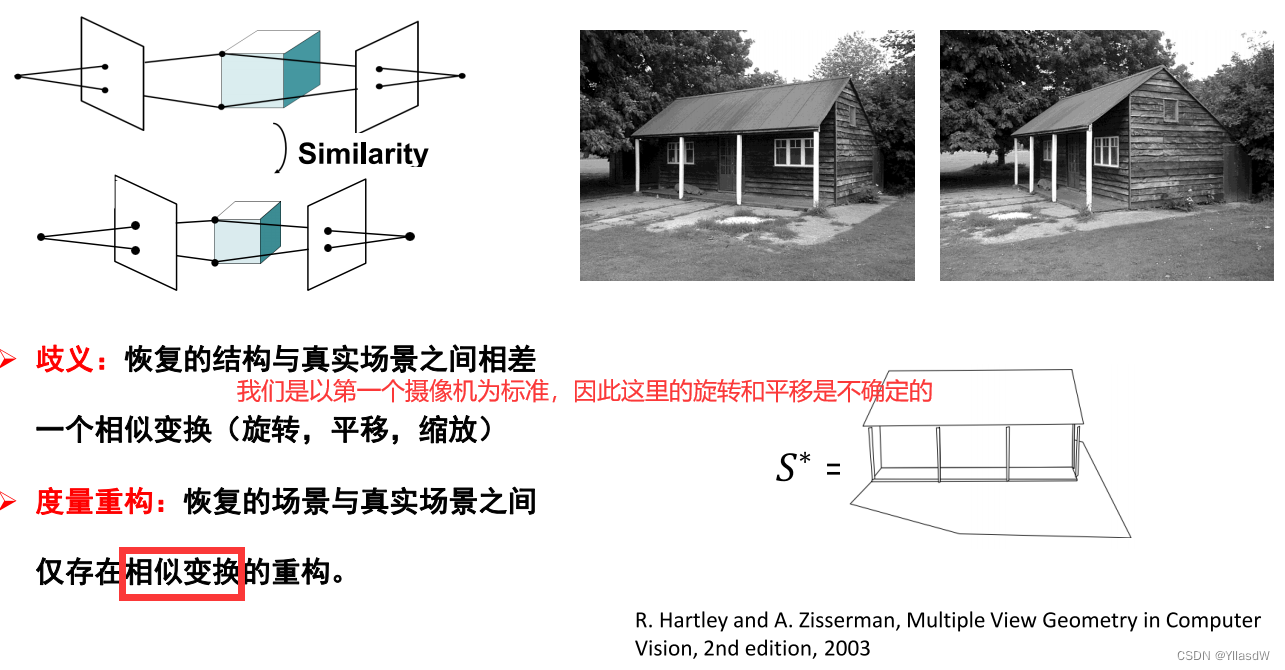
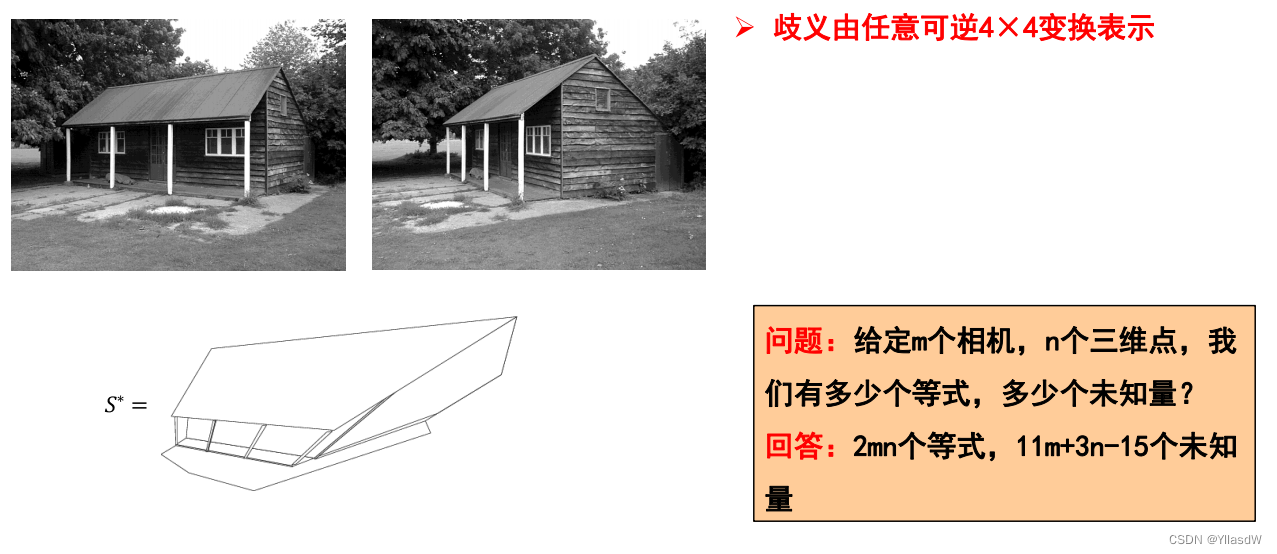
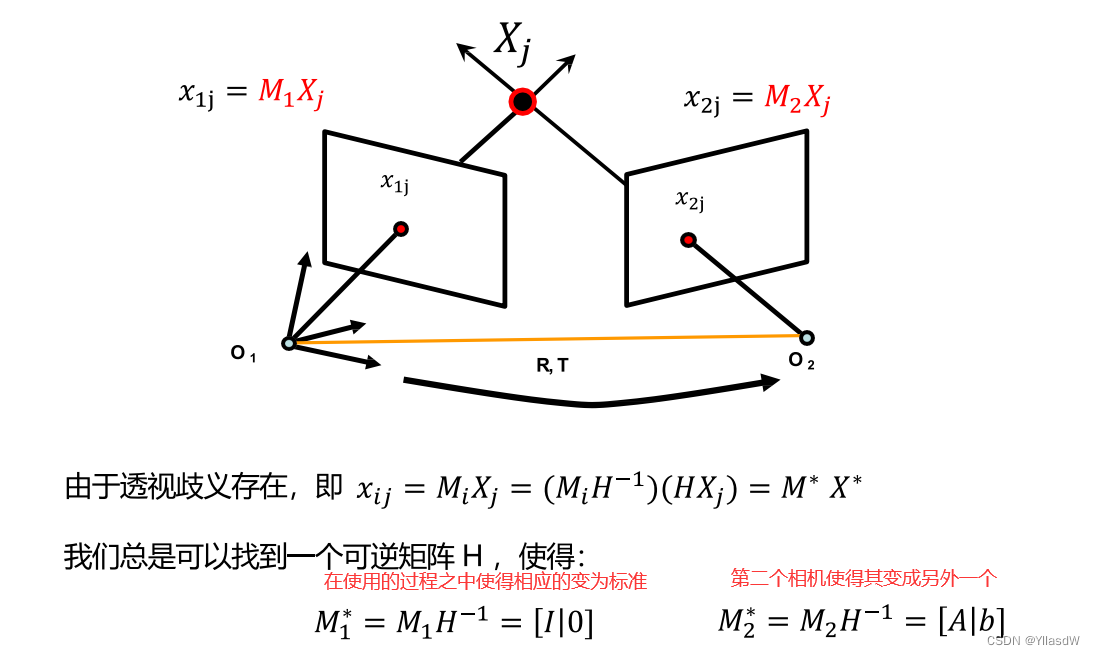
- 透视投影恢复歧义
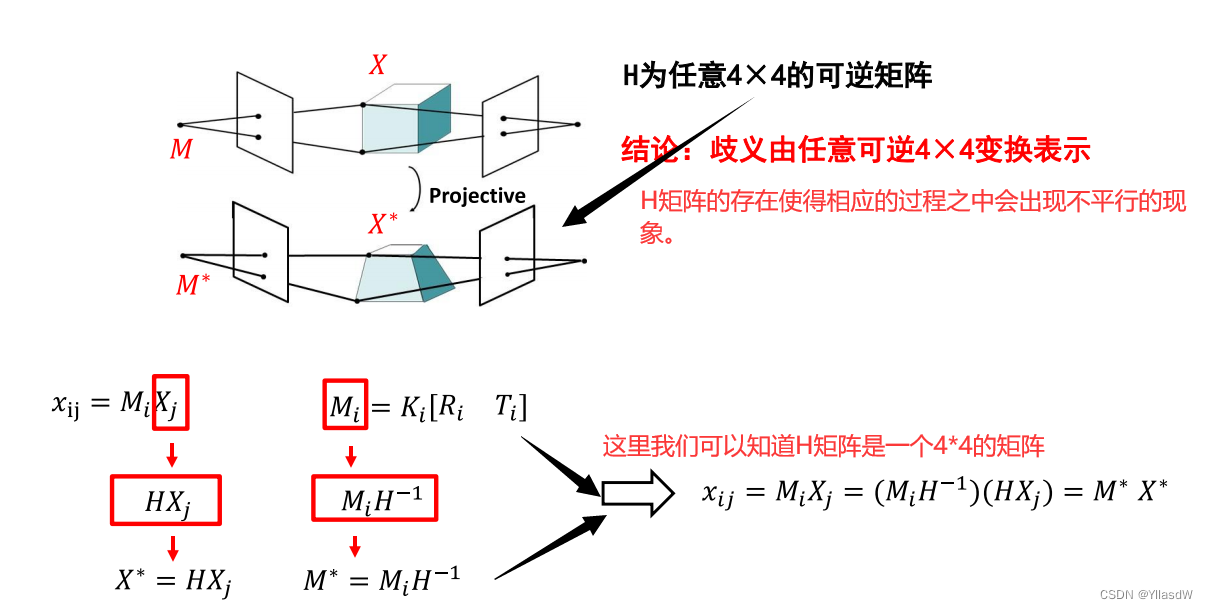
为了解决上面的透视投影出现的问题,我们需要采用新的方式进行相应的一个解决过程。
透视奇异性的问题出现使得求解出现了问题,我们求取不到真实的M
这里的捆绑调整适用于欧式方法,因此这里的BA需要特别特别注意。
- 三维重建三角化的过程是如下所示(老生常谈)
- 代数方法
捆绑调整(Bundle Adjustment)
恢复就够和运动的非线性方法
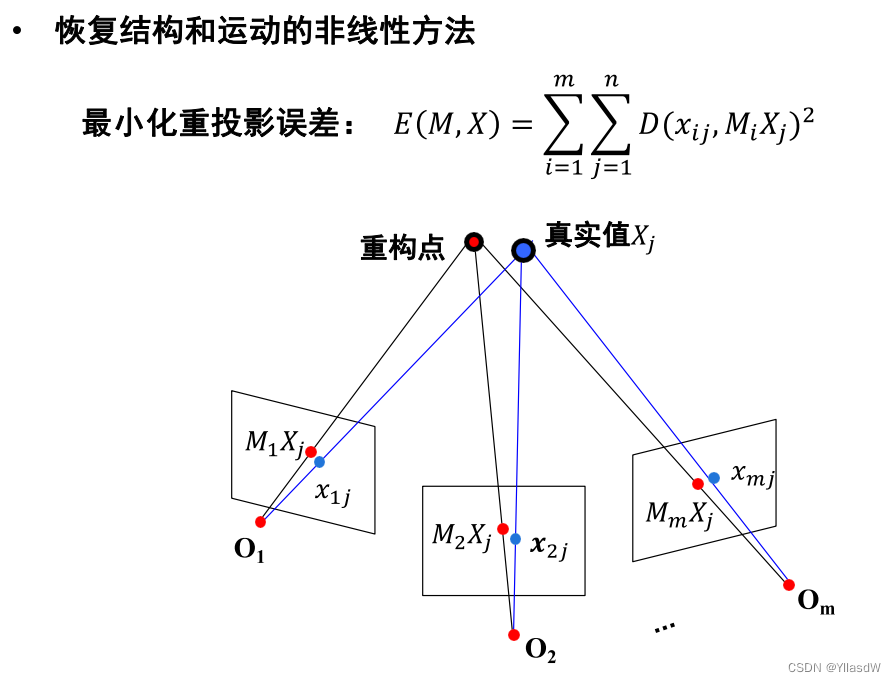
上面的红色的点是重构的过程,上面的M,X都是未知的.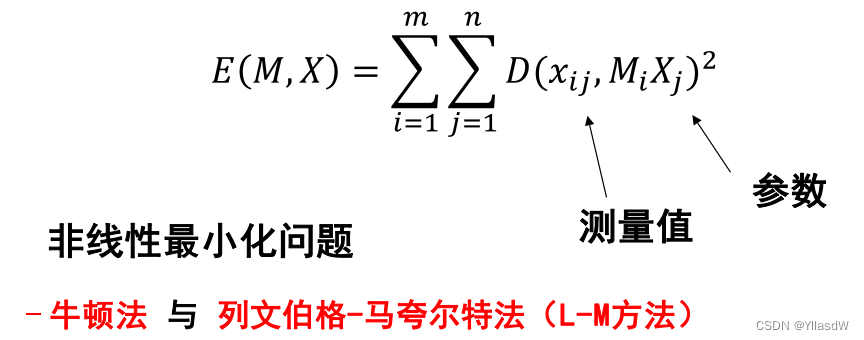
















 1149
1149











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









