







持续更新(maybe…)
一、 aem
- 使用aem后出现:
aem not found或bash: aem: command not found
解决方式:sudo apt install apollo-neo-env-manager-dev
二、apollo源码安装启动容器
bash docker/scripts/dev_into.sh
bash scripts/bootstrap.sh start_plus
./apollo.sh build
使用bash apollo.sh build进行源码编译的过程中可能会出现卡死的现象。
eg:编译到一半bazel提示“socket close”或“internal compiler error: Killed (programcc1plus)”
解决:修改cpu使用数量源码中搜索job_args
-
修改第一行中的–jobs的数量,根据cpu处理器的数量进行修改即可,便不会出现卡死的现象。# job_args="--copt=-mavx2 --host_copt=-mavx2 --jobs=${count} --local_ram_resources=HOST_RAM*0.7" job_args="--copt=-mavx2 --host_copt=-mavx2 --jobs=10 --local_ram_resources=HOST_RAM*0.6" set -x bazel ${1,,} ${CMDLINE_OPTIONS} ${job_args} -- ${formatted_targets} set +x buildtool build xxx -j 10 -m 0.8进程为10,内存占用80%
二、buildtool
- buildtool运行后报错:
- Cannot find WORKSPACE
- Different packages in workspace have a same name
- Package xxx is not in xxx
- Can’t find any package in workspace xxx
buildtool需要在工作空间内运行,即容器内的/apollo_workspace,工作空间有一定的规范,aem会在执行start时将运行aem的路径挂载到容器的/apollo_workspace中,当aem在非apollo的工作空间外执行时,就可能导致以上错误
三、cyber_launch
- lidar
cyber_launch start /apollo/modules/perception/launch/perception_lidar.launch - prediction
cyber_launch start /apollo/modules/prediction/launch/prediction.launch
四、 Dreamview
- https://github.com/ApolloAuto/apollo/issues/1768
五、Centerpoint模型训练与部署
https://apollo.baidu.com/community/article/1141
https://apollo.baidu.com/docs/apollo/9.0/md_docs_2_xE5_xBA_x94_xE7_x94_xA8_xE5_xAE_x9E_xE8_xB7_xB5_2_xE5_xBC_x80_xE5_x8F_x91_xE8_xB0_x83_b7c04610e761dc9d7526ec6c4641a1fe.html
六、模块启动失败
-
感知模块启动失败 https://github.com/ApolloAuto/apollo/issues/14949

-
感知模块不工作 https://github.com/ApolloAuto/apollo/issues/13391

七、buildtool一些问题
在下载applicantion-core文件夹后,需要安装一些包(buildtool install xxx),要根据/apollo/application-core/core/cyberfile.xml中的文件进行install(比如cyberfile.xml中没有perception-data,只有perception-data-conf)。需要在workspace目录先buildtool install perception-data-conf。
源码位于/apollo_workspace/modules下,在/apollo_workspace/modules/perception下修改相应的配置。
# 进入到application-perception代码库
cd application-perception
# 拉取并启动docker容器,如果已拉取不需要执行这条命令
aem start
# 进入容器
aem enter
# 下载lidar感知需要的包(会把包的源码下载下来)。这也是包管理的优势之一,可以根据需要自定义运行流程
buildtool install perception-pointcloud-preprocess
buildtool install perception-pointcloud-map-based-roi
buildtool install perception-pointcloud-ground-detection
buildtool install perception-lidar-tracking
buildtool install perception-lidar-detection-filter
buildtool install perception-data
buildtool install perception-lidar-output
# 编译代码,编译感知代码
buildtool build -p modules/perception/

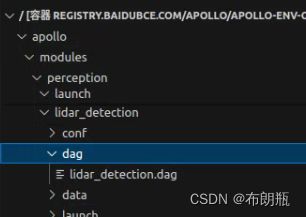
八、 vscode在查看容器时有些文件缺失
问题:
比如无法查看/apollo文件夹下的dag文件
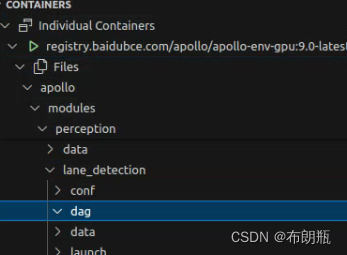
解决:
1. 在vscode中下载dev-containers。
2. 点击docker图标
3. 右键运行的容器,点击附加到vscode
4. 点击打开文件夹,选择
5. 可以显示dag文件















 1303
1303

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









