







参考博文:http://t.csdn.cn/0jsPJ
定时器简介
用来定时的机器,是存在于STM32单片机中的一个外设。STM32总共有8个定时器,分别是2个高级定时器(TIM1、TIM8),4个通用定时器(TIM2、TIM3、TIM4、TIM5)和2个基本定时器(TIM5、TIM6)
定时器的工作原理
使用精准的时基,通过硬件的方式,实现定时的功能。定时器的核心就是计数器
定时器分类
2个高级定时器(TIM1、TIM8),4个通用定时器(TIM2、TIM3、TIM4、TIM5)和2个基本定时器(TIM5、TIM6)

基本定时器:没有输入输出通道,常用作时基,即是定时功能
通用定时器:具有多路独立通道,可用与输入捕获/输出比较,也可以用来作为时基。
高级定时器:除了具备通用定时器的所有功能外,高级定时器具有捕获/比较通道和互补输出、刹车输入等功能。
通用定时器的介绍
- 位于低速的APB1总线上(APB1)
- 16 位向上、向下、向上/向下(中心对齐)计数模式,自动装载计数器(TIMx_CNT)
- 16 位可编程(可以实时修改)预分频器(TIMx_PSC),计数器时钟频率的分频系数 为 1~65535 之间的任意数值
- 4 个独立通道(TIMx_CH1~4),这些通道可以用来作为: ① 输入捕获 ② 输出比较 ③ PWM 生成(边缘或中间对齐模式) ④ 单脉冲模式输出
- 可使用外部信号(TIMx_ETR)控制定时器和定时器互连(可以用 1 个定时器控制另外一个定时器)的同步电路
- 如下事件发生时产生中断/DMA(6个独立的IRQ/DMA请求生成器):
①更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发)
②触发事件(计数器启动、停止、初始化或者由内部/外部触发计数)
③输入捕获
④输出比较
⑤支持针对定位的增量(正交)编码器和霍尔传感器电路
⑥触发输入作为外部时钟或者按周期的电流管理 - STM32 的通用定时器可以被用于:测量输入信号的脉冲长度(输入捕获)或者产生输出波形(输出比较和 PWM)等。
- 使用定时器预分频器和 RCC 时钟控制器预分频器,脉冲长度和波形周期可以在几个微秒到几个毫秒间调整。STM32的每个通用定时器都是完全独立的,没有互相共享的任何资源。
定时器计数模式
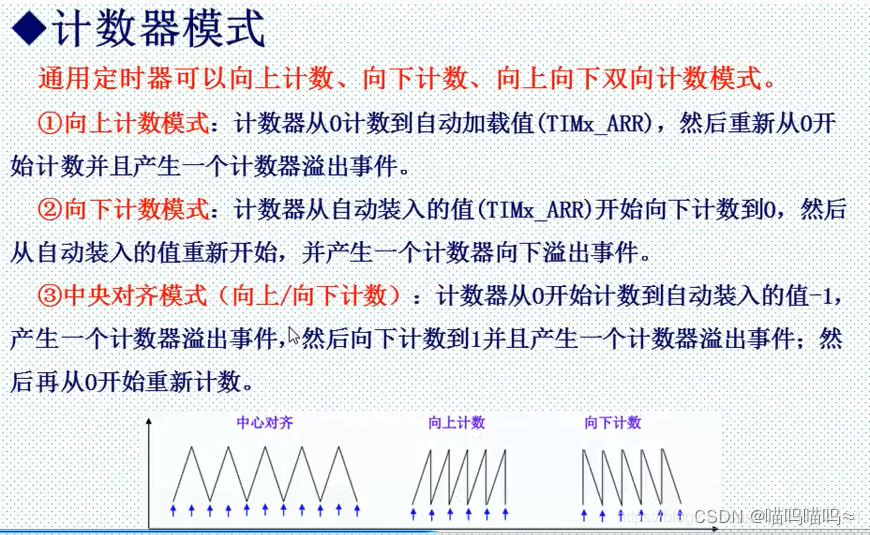
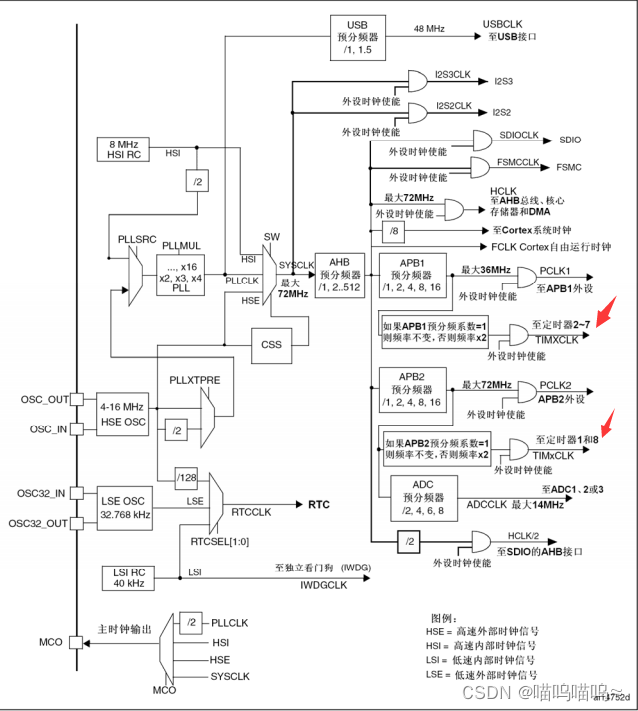
定时器时钟源
定时器的溢出时间计算公式:
TimeOut = ((Prescaler + 1) * (Period + 1) ) / TimeClockFren;
解释下公式参数意义:
TimeOut:定时器溢出时间(单位为us),多少触发(进入)一次TIM中断。
Prescaler:分频TIM时钟的预分频器值。
Period:计数重载值,TIM计数当超过这个值,则重新计数。
TimeClockFren:定时器的输入时钟频率(单位MHZ),也就是当前使用的TIM所用的CLOK的时钟频率。如果不清楚,可通过相关参数得到。
例如要定时500ms,Prescaler =7199,Period=4999,TimeClockFren=72M
定时器中断实验
需求:使用定时器中断的方法,每500ms翻转一次led的状态。
使用CubeMX构建工程
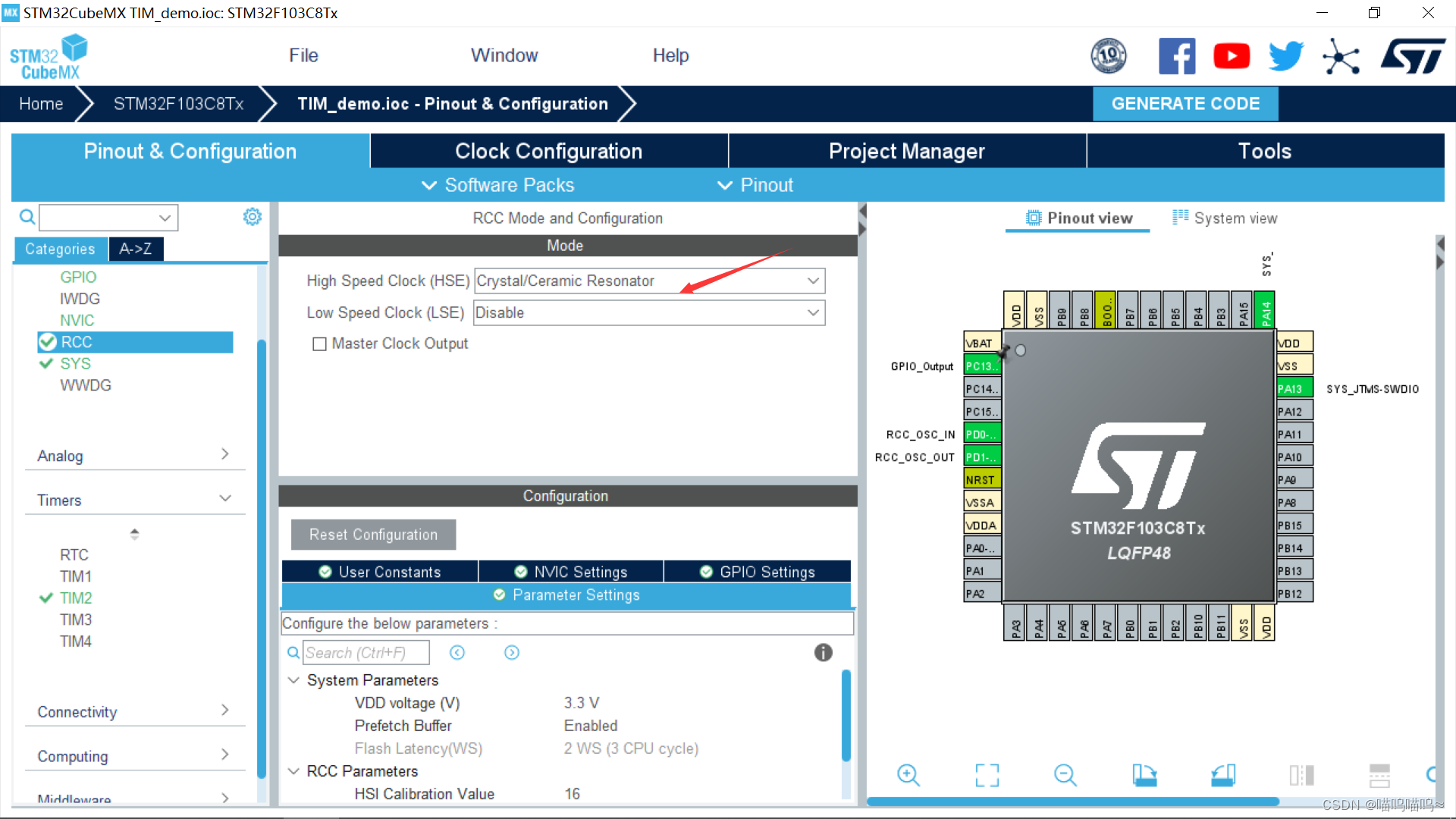
1.RCC配置
2.LED配置
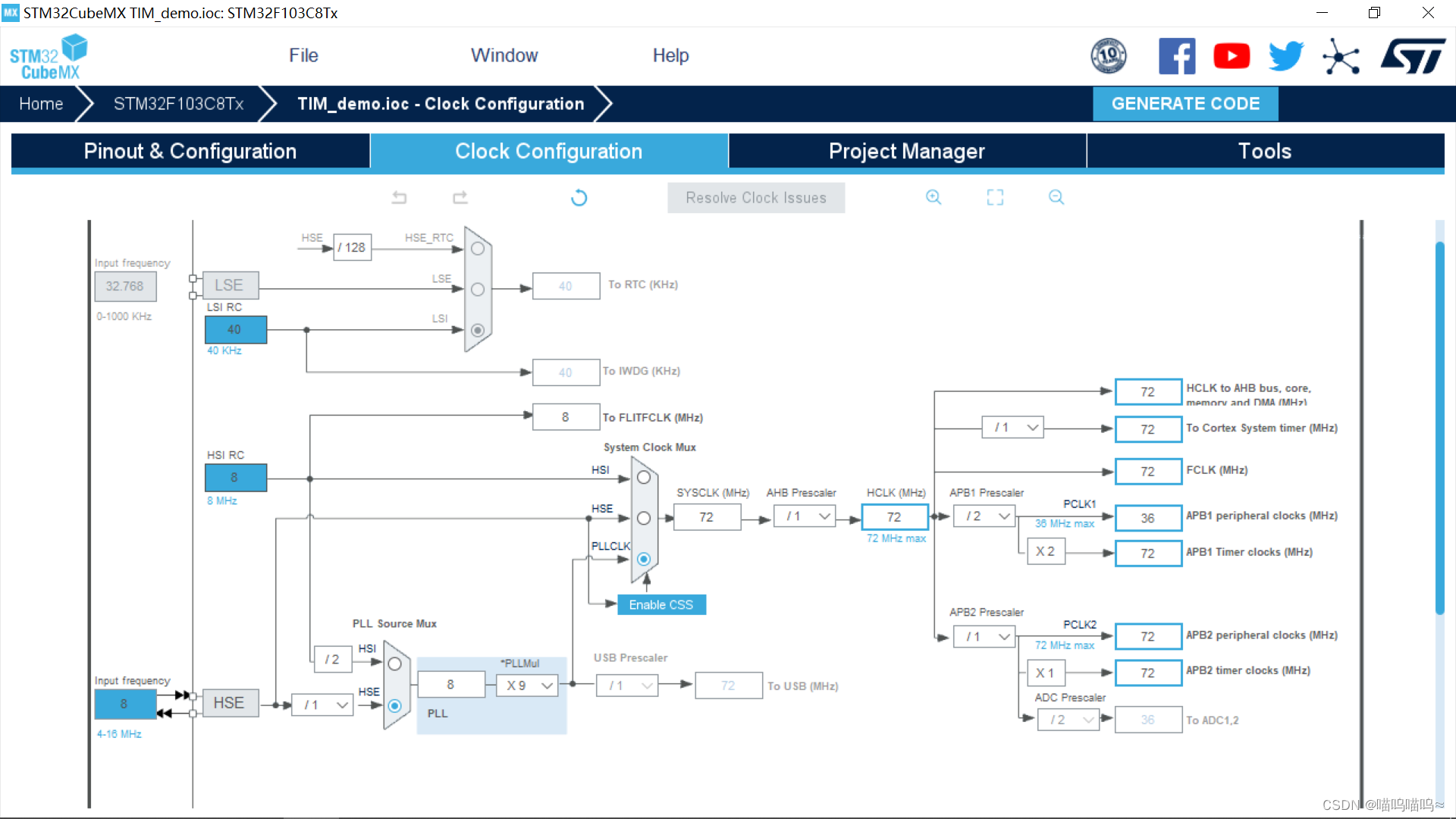
3.时钟数配置
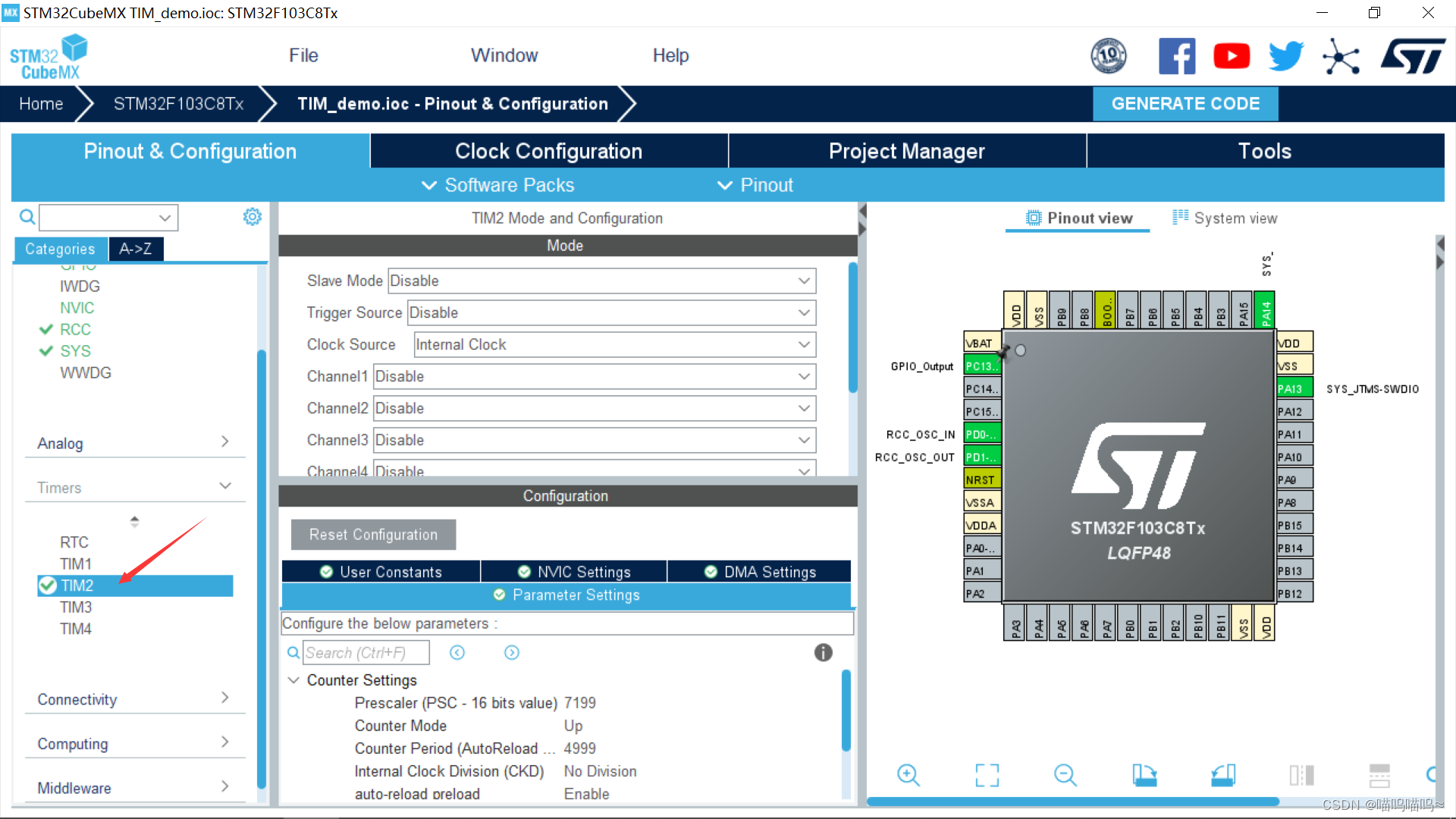
4.TIM2配置
1.RCC配置
4.TIM2配置
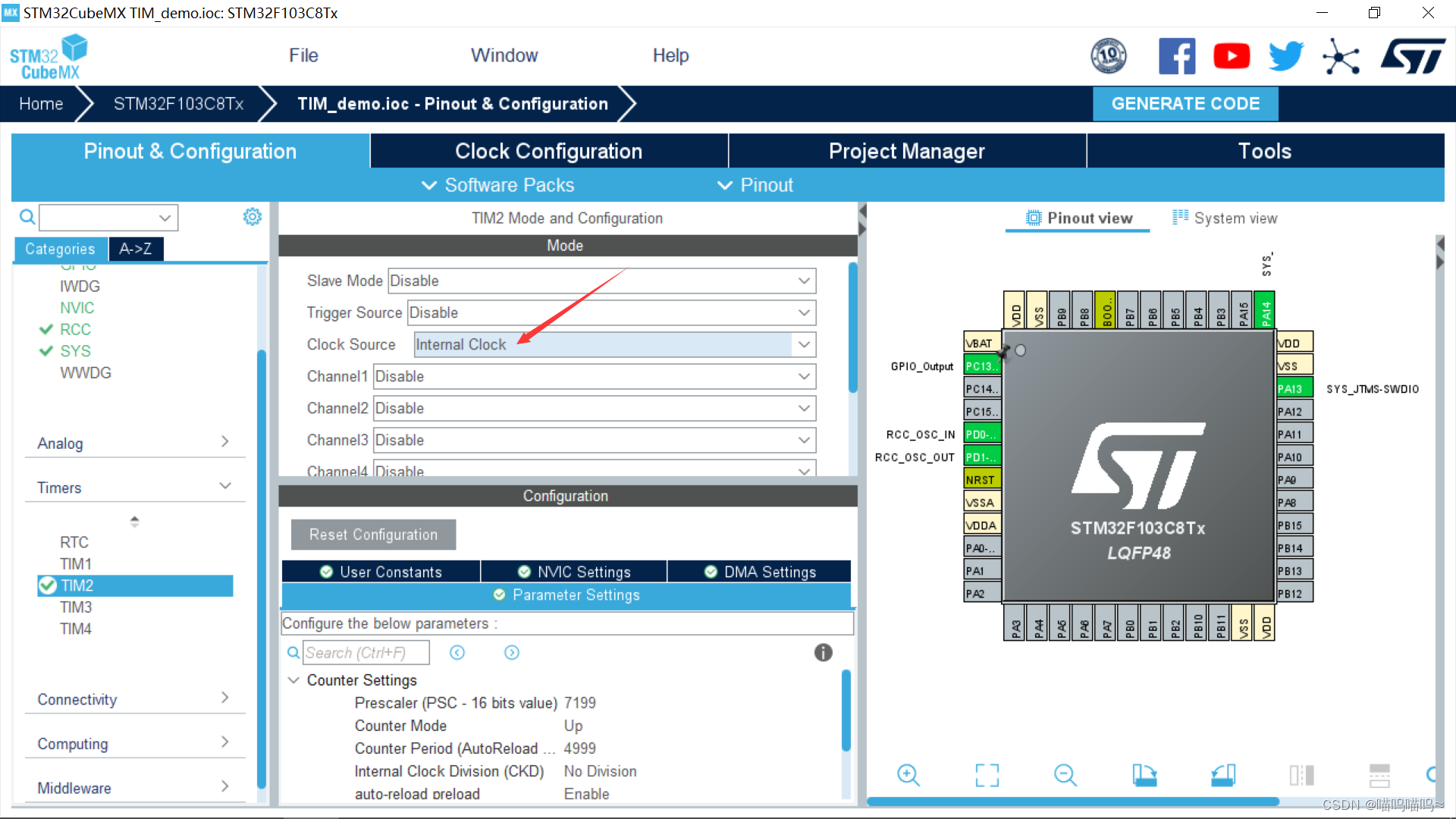
时钟源选择
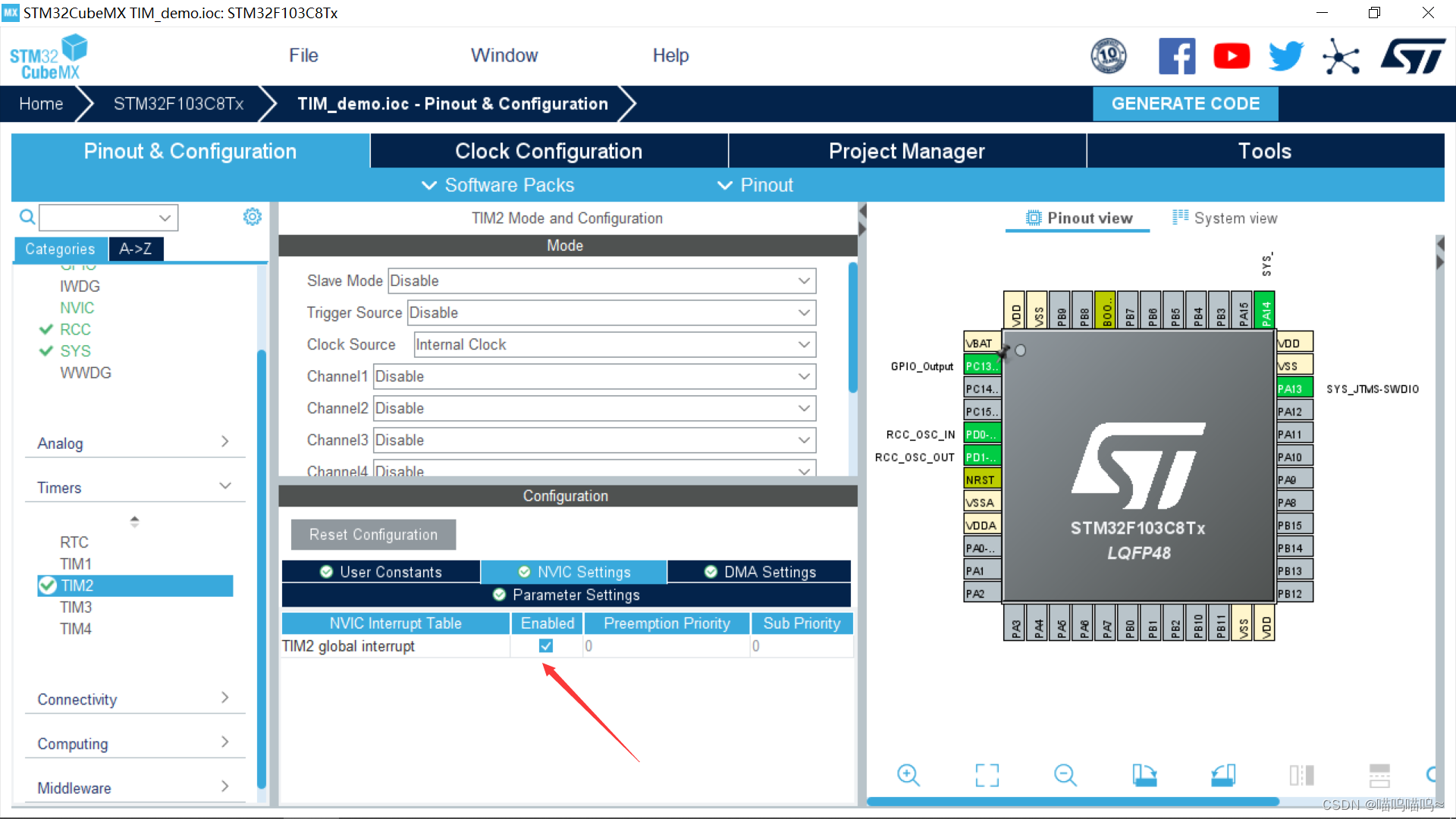
使能勾选
按照需求设置(下面设置的定时500ms,向上计数,psc=7199,Period=4999,自动重装)

重写更新中断回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim2.Instance == TIM2){
HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_13);
}
}
最后在main函数启动定时器(定时器初始化命令后加入)
HAL_TIM_Base_Start_IT(&htim2);














 3179
3179











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









