







学习笔记:3-1三自由度机器人Matlab机器人工具箱运动学jtraj关节空间规划及subplot二维曲线_哔哩哔哩_bilibili
1.机器人工具箱下载
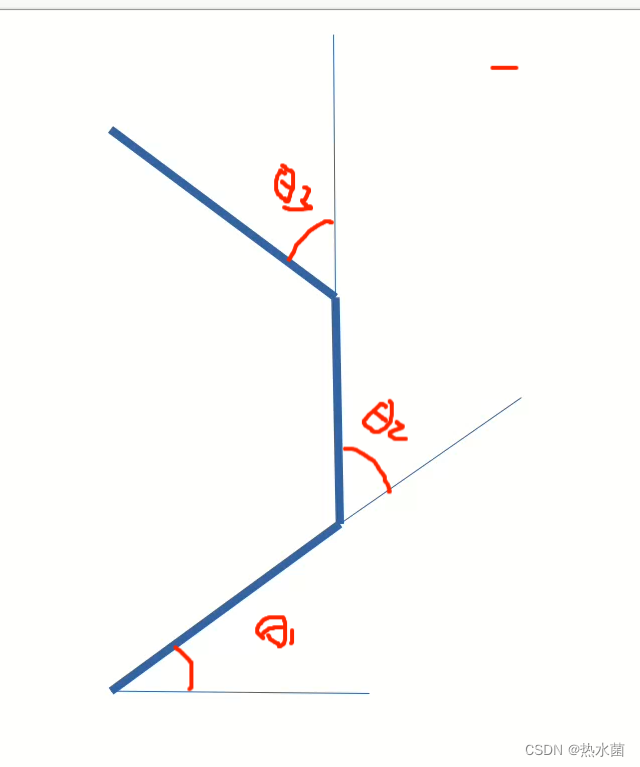
2.DH建模(三自由度机器人)
mdh建模(改进过的)
theta:绕Zi轴,从Xi旋转到Xi+1的角度
D:沿Zi轴,从Xi移动到Xi+1的距离
A:沿Xi轴,从Zi移动到Zi+1的距离
alpha:绕Xi+1轴,从Zi旋转到Zi+1的角度
>> clear
>> a1=0.5;a2=0.5;a3=0.5;
//连杆
L(1)=Link([0 0 0 0 0],'modified');
L(2)=Link([0 0 a1 0 0],'modified');
L(3)=Link([0 0 a2 0 0],'modified');
//机器人建模
ro 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1907
1907

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









